具有取杯口监控功能的杯体传送装置及食品制售机器人的制作方法
本技术涉及食品制售设备,尤其涉及一种具有取杯口监控功能的杯体传送装置及食品制售机器人。
背景技术:
1、现有的制作饮料的食品制售机器人中,食品制售组件在制作完饮料后发送信号控制取杯口的感应门打开,然后用户再取出杯体,食品制售组件接着在获取下一个用户的点单指令后进行下一杯饮料的制作。但是在取杯口放置杯体的空间内并未对杯体是否被取出进行检测,如果前一个用户没有取出饮料杯时,很容易发生下一个用户在点单时没有注意到前一个用户未取走杯体,导致杯体被重新传回的问题发生。
技术实现思路
1、本实用新型的目的之一是为了克服现有技术中的不足,针对现有技术中存在的在取杯口放置杯体的空间内并未对杯体是否被取出进行检测的问题,提供一种具有取杯口监控功能的杯体传送装置及食品制售机器人。
2、为实现以上目的,本实用新型通过以下技术方案实现:
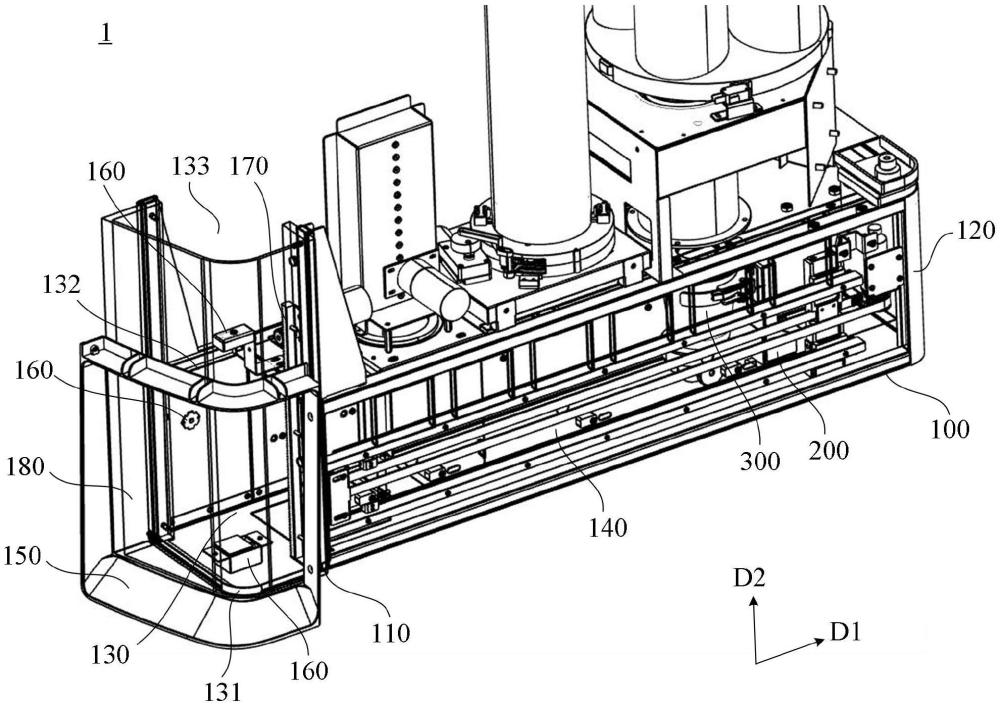
3、第一方面,本实用新型提供了一种具有取杯口监控功能的杯体传送装置,所述杯体传送装置包括传送结构和杯托结构,所述杯托结构设置在所述传送结构中且沿水平方向在所述传送结构的前端和尾端之间来回移动;
4、所述传送结构包括出杯空间和传送空间,所述传送空间从所述尾端延伸至所述前端,所述出杯空间位于所述前端;
5、在所述出杯空间上开设一取杯口,在所述出杯空间中设置至少一个探测器,所述探测器位于所述杯托结构的传送路线之外,所述探测器用于探测被所述杯托结构传送至所述出杯空间停放的杯体是否从所述杯托结构中被取出所述取杯口外,当所述探测器测得所述杯体被取出所述取杯口外时,所述杯托结构向所述传送空间中移动,当所述探测器测得所述杯体未被取出时,所述杯托结构保持静止。
6、在本申请的一个优选实施例中,所述出杯空间具有垂直于重力方向的底壁,所述杯托结构的底部设有圆孔,所述探测器设置在所述底壁上,所述探测器的探测方向与所述重力方向反向,所述杯托结构将所述杯体传送至所述底壁的上方时,所述探测器射出的光线能够穿过所述圆孔。
7、在本申请的一个优选实施例中,所述出杯空间具有平行于重力方向的侧壁,所述探测器设置在所述侧壁上,所述探测器的探测方向为朝向所述杯托结构将所述杯体传送至所述出杯空间中所述杯体所处的立体空间。
8、在本申请的一个优选实施例中,所述出杯空间具有沿所述重力方向开设并位于所述底壁的上方的顶部开口以及沿所述重力方向延伸至所述传送空间上方的升降件,所述探测器测得所述杯体中没有饮料时,所述杯托结构沿所述升降件将所述杯体上升至所述顶部开口外。
9、在本申请的一个优选实施例中,所述探测器为红外对射光电开关、激光对射光电开关、激光漫反射光电开关、红外漫反射光电开关、光纤传感器中的一个或多个,通过检测所述探测器射出的光线是否被遮挡来判断所述杯体是否被从所述杯托结构中取出所述取杯口外。
10、在本申请的一个优选实施例中,所述取杯口处设置感应门,在所述探测器测得被所述杯托结构停放在所述出杯空间内的杯体中有饮料时所述感应门打开,在所述探测器测得所述出杯空间内没有杯体或者所述杯体内没有饮料时所述感应门锁定。
11、第二方面,本实用新型提供了一种食品制售机器人,包括食品制售组件和如第一方面所述的具有取杯口监控功能的杯体传送装置,所述食品制售组件与所述杯体传送装置连接,当所述杯体传送装置的探测器测得杯体被取出取杯口外时,所述食品制售组件开启接收点单指令,当所述探测器测得所述杯体未被取出时,所述食品制售组件停止接收点单指令。
12、本实用新型所公开的具有取杯口监控功能的杯体传送装置及食品制售机器人,能够检测取杯口放置杯体的出杯空间内制作完饮料的杯体是否被取出,在杯体未被取出时保持杯托结构静止并停止点单,等待用户取走饮料,避免发生下一个用户的点单行为将上一个用户的饮料重新传回的情况发生。
技术特征:
1.一种具有取杯口监控功能的杯体传送装置,其特征在于,所述杯体传送装置包括传送结构和杯托结构,所述杯托结构设置在所述传送结构中且沿水平方向在所述传送结构的前端和尾端之间来回移动;
2.根据权利要求1所述的杯体传送装置,其特征在于,所述出杯空间具有垂直于重力方向的底壁,所述杯托结构的底部设有圆孔,所述探测器设置在所述底壁上,所述探测器的探测方向与所述重力方向反向,所述杯托结构将所述杯体传送至所述底壁的上方时,所述探测器射出的光线能够穿过所述圆孔。
3.根据权利要求1所述的杯体传送装置,其特征在于,所述出杯空间具有平行于重力方向的侧壁,所述探测器设置在所述侧壁上,所述探测器的探测方向为朝向所述杯托结构将所述杯体传送至所述出杯空间中所述杯体所处的立体空间。
4.根据权利要求2或3所述的杯体传送装置,其特征在于,所述出杯空间具有沿所述重力方向开设并位于所述出杯空间的底壁的上方的顶部开口以及沿所述重力方向延伸至所述传送空间上方的升降件,所述探测器测得所述杯体中没有饮料时,所述杯托结构沿所述升降件将所述杯体上升至所述顶部开口外。
5.根据权利要求1所述的杯体传送装置,其特征在于,所述探测器为红外对射光电开关、激光对射光电开关、激光漫反射光电开关、红外漫反射光电开关、光纤传感器中的一个或多个,通过检测所述探测器射出的光线是否被遮挡来判断所述杯体是否被从所述杯托结构中取出所述取杯口外。
6.根据权利要求1所述的杯体传送装置,其特征在于,所述取杯口处设置感应门,在所述探测器测得被所述杯托结构停放在所述出杯空间内的杯体中有饮料时所述感应门打开,在所述探测器测得所述出杯空间内没有杯体或者所述杯体内没有饮料时所述感应门锁定。
7.一种食品制售机器人,其特征在于,包括食品制售组件和如权利要求1至6任一项所述的具有取杯口监控功能的杯体传送装置,所述食品制售组件与所述杯体传送装置连接,当所述杯体传送装置的探测器测得杯体被取出取杯口外时,所述食品制售组件开启接收点单指令,当所述探测器测得所述杯体未被取出时,所述食品制售组件停止接收点单指令。
技术总结
本技术公开了一种具有取杯口监控功能的杯体传送装置及食品制售机器人,其中杯托结构在传送结构的前端和尾端之间来回移动;传送结构包括出杯空间和传送空间,传送空间从尾端延伸至前端,出杯空间位于前端;当出杯空间的探测器测得杯体被取出取杯口外时,杯托结构向传送空间中移动,当探测器测得杯体未被取出时,杯托结构保持静止。本技术的技术方案检测取杯口放置杯体的出杯空间内制作完饮料的杯体是否被取出,在杯体未被取出时保持杯托结构静止并停止点单,等待用户取走饮料,避免发生下一个用户的点单行为将上一个用户的饮料重新传回的情况发生。
技术研发人员:张倩,娄会,刘嘉蓓
受保护的技术使用者:上海十年智能科技有限公司
技术研发日:20230331
技术公布日:2024/2/21
- 还没有人留言评论。精彩留言会获得点赞!