建筑施工用运砖机器人的制作方法
本技术涉及建筑施工,尤其涉及一种建筑施工用运砖机器人。
背景技术:
1、建筑施工是人们利用各种建筑材料、机械设备按照特定的设计蓝图在一定的空间、时间内进行的为建造各式各样的建筑产品而进行的生产活动,它包括从施工准备、破土动工到工程竣工验收的全部生产过程。
2、目前,市面上在建的很大一部分建筑物,特别是中小城市以及农村中的低层建筑物仍然采用砖混结构,也即使用砖块作为连接体,使用混凝土或砂浆作为粘结剂,采用砌筑的方式建造形成建筑物,在砌筑的过程中,需要将砖块运送到高处,从而方便工人进行砌筑工作。
3、在农村的一些底层房屋砌筑中,工人一般站在脚手架上,在进行砌筑时需要脚手架下方的工人将砖向上抛送,并与脚手架上的工人相互配合从而将砖输送至脚手架上,这种操作方式增加了工人的劳动强度;此外,现在有一些工地采用输送带来输送砖,通过倾斜的输送带来进行输送砖的工作,但是输送带的角度一般是固定的,能够在特定高度范围内进行输砖工作,随着砌筑高度的增加,需要在输送带下方垫加砖块来提高输送带的输送高度,操作也较为麻烦。
技术实现思路
1、本实用新型的目的在于提供一种建筑施工用运砖机器人,其能够满足适用于较多不同高度的砖块输送工作,并有效提高输送的灵活性和实用性。
2、为达到上述目的,本实用新型采用如下技术方案:
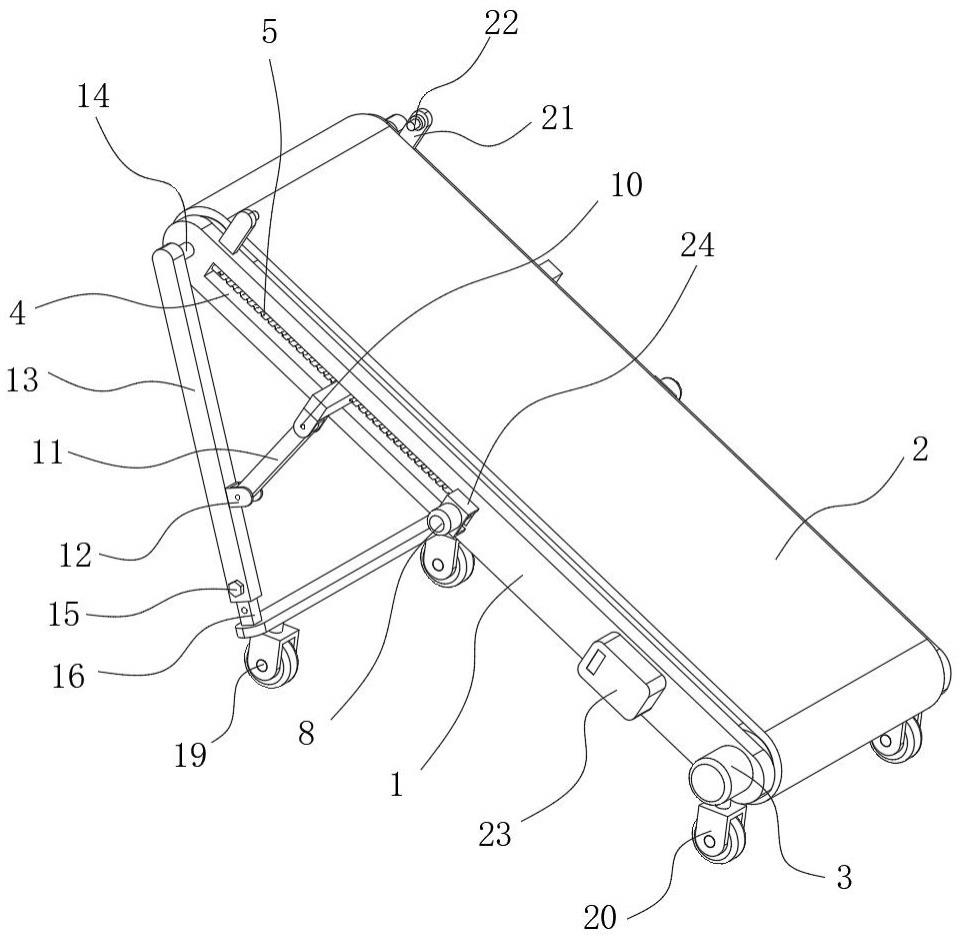
3、一种建筑施工用运砖机器人,包括:支架,所述支架设置有传送带,所述传送带的传动轴处固定连接有安装在所述支架的一侧的驱动电机;
4、所述支架开设有导向槽,所述导向槽的内壁通过轴承转动连接有丝杆,所述丝杆的一端外表面固定连接有第一锥齿轮,所述第一锥齿轮的外表面啮合有第二锥齿轮,所述第二锥齿轮的键槽内壁固定连接有转轴,且所述转轴远离所述第二锥齿轮的一端固定连接有电机;
5、所述丝杆的外表面螺纹连接有移动座,所述移动座的一侧固定连接有第一铰接座,所述第一铰接座的一侧铰接有支承拉杆,所述支撑拉杆远离所述第一铰接座的一端铰接有第二铰接座,所述第二铰接座的一侧固定连接有空心转动杆,所述空心转动杆的顶端固定连接有与所述支架转动连接的支撑转轴;
6、所述空心转动杆的底端螺纹连接有固定螺栓,并通过所述固定螺栓在内部滑动连接有调节杆,且所述调节杆的一侧开设有若干个调节插孔,所述调节杆的底端固定连接有连接板,所述连接板远离所述调节杆的一侧固定安装有第一移动轮,且所述支架的底端固定连接有第二移动轮。
7、实际应用时,所述支架的顶端固定连接有安装板,且所述安装板的内侧设置有接近传感器;所述支架的外侧固定安装有控制器,且所述控制器与所述接近传感器及所述驱动电机分别电性连接。
8、其中,所述支架的外侧固定连接有u形安装架,且所述u形安装架固定安装有所述电机。
9、具体地,所述移动座与所述导向槽滑动连接,且所述移动座的宽度与所述导向槽的宽度一致。
10、进一步地,所述固定螺栓与所述调节插孔的尺寸相适配。
11、更进一步地,所述第一移动轮和所述第二移动轮均具有自锁功能。
12、相对于现有技术,本实用新型所述的建筑施工用运砖机器人具有以下优势:
13、本实用新型提供的建筑施工用运砖机器人中,由于通过支架、传送带、丝杆、第一锥齿轮、第二锥齿轮、电机、移动座、第一铰接座、支撑拉杆、第二铰接座、空心转动杆、支撑转轴、调节杆、连接板和第一移动轮的配合设置,因此能够有效调节支架和传送带的角度,从而能够调整输送的高度,并通过与调节杆、调节插孔和固定螺栓的配合设置,能够调整调节杆的伸出长度,进而能够进一步地调节传送带的输送高度,使得该运砖机器人能够满足较多高度的输送工作,有效提高了该运砖机器人的实用性和结构灵活性。
技术特征:
1.一种建筑施工用运砖机器人,其特征在于,包括:支架,所述支架设置有传送带,所述传送带的传动轴处固定连接有安装在所述支架的一侧的驱动电机;
2.根据权利要求1所述的建筑施工用运砖机器人,其特征在于,所述支架的顶端固定连接有安装板,且所述安装板的内侧设置有接近传感器;所述支架的外侧固定安装有控制器,且所述控制器与所述接近传感器及所述驱动电机分别电性连接。
3.根据权利要求1或2所述的建筑施工用运砖机器人,其特征在于,所述支架的外侧固定连接有u形安装架,且所述u形安装架固定安装有所述电机。
4.根据权利要求1或2所述的建筑施工用运砖机器人,其特征在于,所述移动座与所述导向槽滑动连接,且所述移动座的宽度与所述导向槽的宽度一致。
5.根据权利要求1或2所述的建筑施工用运砖机器人,其特征在于,所述固定螺栓与所述调节插孔的尺寸相适配。
6.根据权利要求1或2所述的建筑施工用运砖机器人,其特征在于,所述第一移动轮和所述第二移动轮均具有自锁功能。
技术总结
一种建筑施工用运砖机器人,涉及建筑施工技术领域,其能够满足适用于较多不同高度的砖块输送工作,并有效提高输送的灵活性和实用性。所述建筑施工用运砖机器人中,通过支架、传送带、丝杆、第一锥齿轮、第二锥齿轮、电机、移动座、第一铰接座、支撑拉杆、第二铰接座、空心转动杆、支撑转轴、调节杆、连接板和第一移动轮的配合设置,能够有效调节支架和传送带的角度,从而能够调整输送的高度,并通过与调节杆、调节插孔和固定螺栓的配合设置,能够调整调节杆的伸出长度,进而能够进一步地调节传送带的输送高度。
技术研发人员:邢小虎,刘颖茹,潘莉,侯亚楠,程亮,李冲,谢畅君,石浩,车阳凯,赵燊
受保护的技术使用者:中国航天建设集团有限公司
技术研发日:20230403
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!