高空作业平台轻量化飞臂及高空作业平台的制作方法
本技术涉及高空作业平台,尤其涉及一种高空作业平台轻量化飞臂及高空作业平台。
背景技术:
1、随着臂架式高空作业平台行业的技术发展,轻量化的产品设计以及操纵舒适性越来越成为高空作业平台的技术发展方向。
2、产品原材料成本不断上涨,同时伴随着工程机械电动化发展趋势,轻量化设计在产品开发过程中日益凸显。飞臂结构在臂式高空作业平台的臂架结构末端,起到连接伸缩臂与平台的作用。由于其位置处于伸缩架的末端,在伸缩臂伸展时,飞臂结构的重量严重影响着整机稳定性,对于整机设计重量起到重要影响作用。因此轻量设计的飞臂结构,是目前高空作业平台轻量设计的重要内容,其重量降低对于整机重量有着至关重要的作用。
3、现有技术中飞臂结构的上连杆为整体结构,不利于实现飞臂结构的轻量化设计。
技术实现思路
1、本实用新型的目的在于提供一种高空作业平台轻量化飞臂及高空作业平台,上连杆通过设置成相互扣合焊接的第一折弯板和第二折弯板,且两者的板厚度不同,以实现轻量化设计。
2、为达此目的,本实用新型采用以下技术方案:
3、高空作业平台轻量化飞臂,包括上连杆、下连杆、第一支架、第二支架以及变幅油缸,所述上连杆和所述下连杆相互平行设置,所述第一支架铰接所述上连杆和所述下连杆位于同侧的一端,所述第二支架铰接所述上连杆和所述下连杆位于同侧的另一端,所述变幅油缸设置于所述上连杆和所述下连杆之间,所述上连杆和所述第一支架铰接的一端铰接于伸缩臂,所述第二支架连接操作平台,所述上连杆包括第一折弯板和第二折弯板,所述第一折弯板和所述第二折弯板相互扣合焊接,且所述第一折弯板和所述第二折弯板中,靠近所述变幅油缸的一个的板厚大于远离所述变幅油缸的另一个的板厚。
4、作为一种可选方案,所述上连杆还包括两个第一耳板,两个所述第一耳板对称固定设置于所述上连杆的两侧面,所述第一耳板和所述第二耳板同时与所述第一折弯板和所述第二折弯板固定连接,两个所述第一耳板通过销轴铰接于所述伸缩臂的两个端板之间。
5、作为一种可选方案,两个所述第一耳板之间设置有轴套,所述销轴穿设于所述轴套内。
6、作为一种可选方案,所述上连杆还包括第一封板、第二封板以及第三封板,所述第一封板设置于两个所述第一耳板之间并位于两个所述第一耳板的上端,且所述第一封板背离所述伸缩臂的一端与所述第二折弯板连接,所述第二封板和所述第三封板分别封闭所述上连杆沿其长度方向的两端。
7、作为一种可选方案,还包括接近开关传感器,所述接近开关传感器设置于所述伸缩臂上,当所述上连杆转动至设定位置时,所述接近开关传感器能够被触发,进而控制所述变幅油缸的伸缩速度。
8、作为一种可选方案,所述接近开关传感器通过套筒设置于所述伸缩臂上,所述套筒的内表面设置有内螺纹,所述接近开关传感器螺纹连接于所述套筒。
9、作为一种可选方案,所述接近开关传感器上还设有螺母,当所述接近开关传感器螺纹连接于所述套筒后,所述螺母能够与所述接近开关传感器螺纹连接并以使所述接近开关传感器相对所述套筒的位置进行固定。
10、作为一种可选方案,所述接近开关传感器设置有两个,两个所述接近开关传感器对称设置于所述伸缩臂的两个端板上。
11、作为一种可选方案,所述变幅油缸通过比例电磁阀控制,当所述接近开关传感器被触发后,通过控制所述比例电磁阀的开度来实现所述变幅油缸的伸缩速度。
12、高空作业平台,包括上述任一方案中所述的高空作业平台轻量化飞臂。
13、本实用新型的有益效果:
14、本实用新型提供的高空作业平台轻量化飞臂通过将第一折弯板和第二折弯板相互扣合焊接以构成整体的上连杆,且选用不同板厚度的第一折弯板和第二折弯板,以使其在满足承载能力的同时减轻上连杆的重量。该高空作业平台轻量化飞臂通过将分体且板厚度不同的第一折弯板和第二折弯板焊接成上连杆,实现了高空作业平台轻量化飞臂的轻量化设计,且同时能够满足承载要求,结构设计合理。
技术特征:
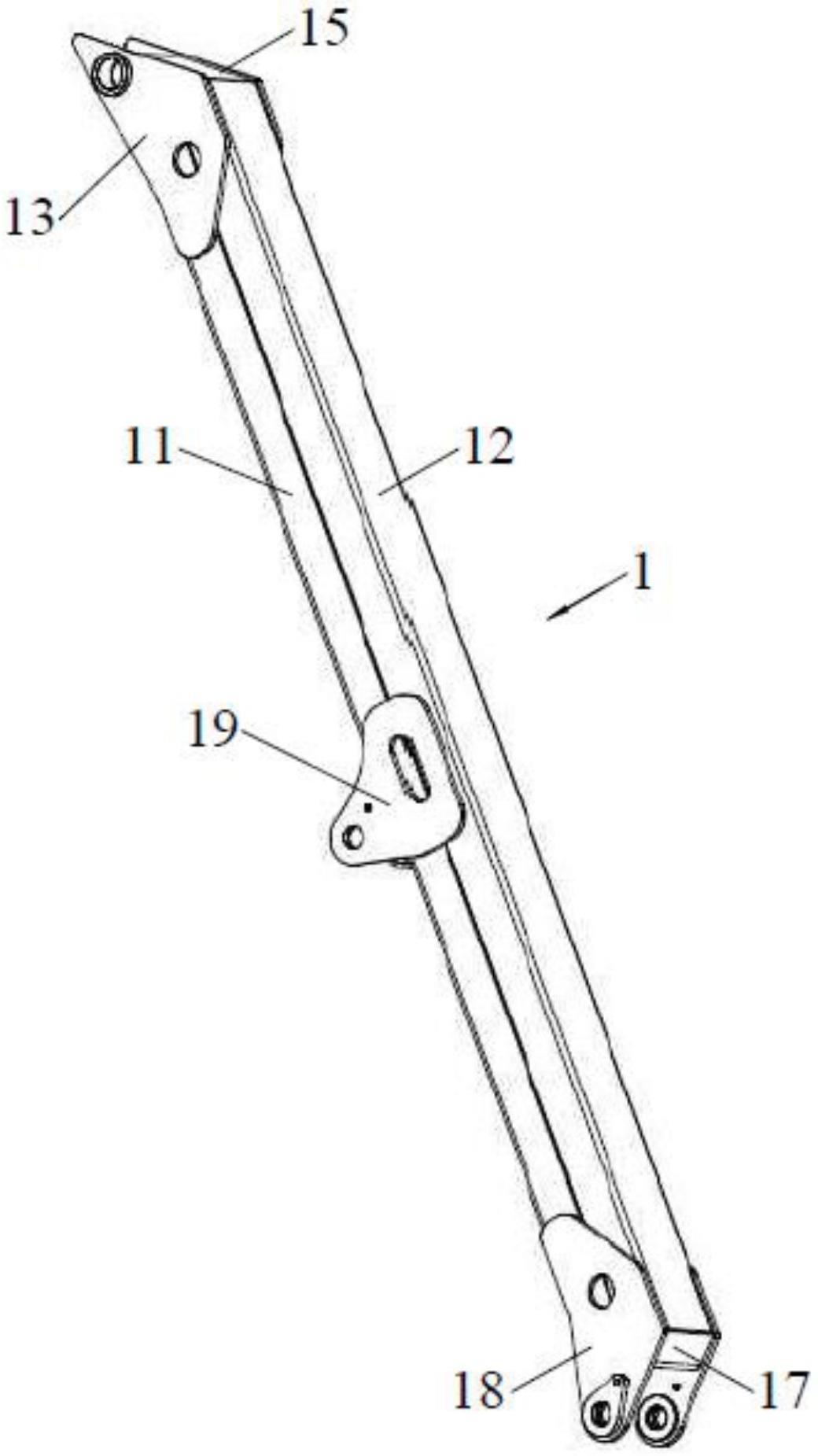
1.高空作业平台轻量化飞臂,包括上连杆(1)、下连杆(2)、第一支架(3)、第二支架(4)以及变幅油缸(5),所述上连杆(1)和所述下连杆(2)相互平行设置,所述第一支架(3)铰接所述上连杆(1)和所述下连杆(2)位于同侧的一端,所述第二支架(4)铰接所述上连杆(1)和所述下连杆(2)位于同侧的另一端,所述变幅油缸(5)设置于所述上连杆(1)和所述下连杆(2)之间,所述上连杆(1)和所述第一支架(3)铰接的一端铰接于伸缩臂(100),所述第二支架(4)连接操作平台(200),其特征在于,所述上连杆(1)包括第一折弯板(11)和第二折弯板(12),所述第一折弯板(11)和所述第二折弯板(12)相互扣合焊接,且所述第一折弯板(11)和所述第二折弯板(12)中,靠近所述变幅油缸(5)的一个的板厚大于远离所述变幅油缸(5)的另一个的板厚。
2.根据权利要求1所述的高空作业平台轻量化飞臂,其特征在于,所述上连杆(1)还包括两个第一耳板(13),两个所述第一耳板(13)对称固定设置于所述上连杆(1)的两侧面,所述第一耳板(13)同时与所述第一折弯板(11)和所述第二折弯板(12)固定连接,两个所述第一耳板(13)通过销轴(6)铰接于所述伸缩臂(100)的两个端板(101)之间。
3.根据权利要求2所述的高空作业平台轻量化飞臂,其特征在于,两个所述第一耳板(13)之间设置有轴套(14),所述销轴(6)穿设于所述轴套(14)内。
4.根据权利要求2所述的高空作业平台轻量化飞臂,其特征在于,所述上连杆(1)还包括第一封板(15)、第二封板(16)以及第三封板(17),所述第一封板(15)设置于两个所述第一耳板(13)之间并位于两个所述第一耳板(13)的上端,且所述第一封板(15)背离所述伸缩臂(100)的一端与所述第二折弯板(12)连接,所述第二封板(16)和所述第三封板(17)分别封闭所述上连杆(1)沿其长度方向的两端。
5.根据权利要求1所述的高空作业平台轻量化飞臂,其特征在于,还包括接近开关传感器(7),所述接近开关传感器(7)设置于所述伸缩臂(100)上,当所述上连杆(1)转动至设定位置时,所述接近开关传感器(7)能够被触发,进而控制所述变幅油缸(5)的伸缩速度。
6.根据权利要求5所述的高空作业平台轻量化飞臂,其特征在于,所述接近开关传感器(7)通过套筒(8)设置于所述伸缩臂(100)上,所述套筒(8)的内表面设置有内螺纹,所述接近开关传感器(7)螺纹连接于所述套筒(8)。
7.根据权利要求6所述的高空作业平台轻量化飞臂,其特征在于,所述接近开关传感器(7)上还设有螺母(71),当所述接近开关传感器(7)螺纹连接于所述套筒(8)后,所述螺母(71)能够与所述接近开关传感器(7)螺纹连接以使所述接近开关传感器(7)相对所述套筒(8)的位置进行固定。
8.根据权利要求5所述的高空作业平台轻量化飞臂,其特征在于,所述接近开关传感器(7)设置有两个,两个所述接近开关传感器(7)对称设置于所述伸缩臂(100)的两个端板(101)上。
9.根据权利要求5所述的高空作业平台轻量化飞臂,其特征在于,所述变幅油缸(5)通过比例电磁阀控制,当所述接近开关传感器(7)被触发后,通过控制所述比例电磁阀的开度来实现所述变幅油缸(5)的伸缩速度。
10.高空作业平台,其特征在于,包括权利要求1-9任一项所述的高空作业平台轻量化飞臂。
技术总结
本技术属于高空平台技术领域,公开了一种高空作业平台轻量化飞臂及高空作业平台。高空作业平台轻量化飞臂包括上连杆、下连杆、第一支架、第二支架以及变幅油缸。上连杆和下连杆平行设置,第一支架铰接上连杆和下连杆位于同侧的一端,第二支架铰接于上连杆和下连杆位于同侧的另一端,上连杆、下连杆、第一支架以及第二支架构成平行四边形结构,变幅油缸设置于上连杆和下连杆之间,上连杆和第一支架铰接的一端铰接于伸缩臂,第二支架通过摆动油缸连接操作平台。上连杆包括第一折弯板和第二折弯板,第一折弯板和第二折弯板相互扣合焊接,且第一折弯板的板厚大于第二折弯板的板厚,以实现高空作业平台轻量化飞臂的轻量化设计。
技术研发人员:左志永,王德红,赵忠立,杨振宁,苏超飞
受保护的技术使用者:临工重机股份有限公司
技术研发日:20230403
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!