一种物流搬运机器人的制作方法
本技术涉及物流搬运,具体为一种物流搬运机器人。
背景技术:
1、机器人在各个工业领域内具有多种用途。例如在物流行业,机器人用于快件的搬运和堆放,将收入的快件进行分类后,被机器人进行运输,并安装固定的程序放置到预设的区域,随着快件数量的日益加大,人力已经无法满足该项工作,而使用机器人的话,工作效率会明细提高,且可节约大量人力成本。
2、目前的一种物流搬运用机器人,如公告号cn208166013u的专利所述一种物流搬运用机器人其组成包括:包括推板机、放置板、固定轴、旋转齿轮、第二升降杆、旋转杆、光感导向器和驱动装置,所述推板机与导轨卡合连接,所述放置板两侧开设有导轨,所述固定轴与第一升降杆连接,所述轴承外侧焊接有卡齿槽,所述第二升降杆分别与第一升降杆和旋转杆通过旋转齿轮连接,所述旋转杆上固定安装有电动机,所述光感导向器与驱动装置电性连接,所述驱动装置外侧安装有电量标、控制按钮和充电槽。该物流用搬运机器人,使得能够识别前方的隔挡物,并且该装置是根据地面标志线进行运动的,运行速度上比较高效,可以自动将快件运到指定位置后自动堆放,并且该装置可以自由升降和旋转,可以满足不同方向和高度的堆放需求。
3、针对上述中的相关技术,申请人认为一种物流搬运用机器人在对快件进行搬运时,需要通过驱动装置的移动来实现对快件的运输,而驱动装置在移动的过程中,难免会由于道路颠簸等各种原因导致自身在运输的过程中产生晃动,而驱动装置晃动的同时,会带动对快件的同步进行晃动,难以保证快件在运输时的稳定性。
技术实现思路
1、本实用新型的目的在于提供一种物流搬运机器人,以解决上述背景技术中提出装置在对快件进行搬运时,需要通过驱动装置的移动来实现对快件的运输,而驱动装置在移动的过程中,难免会由于道路颠簸等各种原因导致自身在运输的过程中产生晃动,而驱动装置晃动的同时,会带动对快件的同步进行晃动,难以保证快件在运输时稳定性的问题。
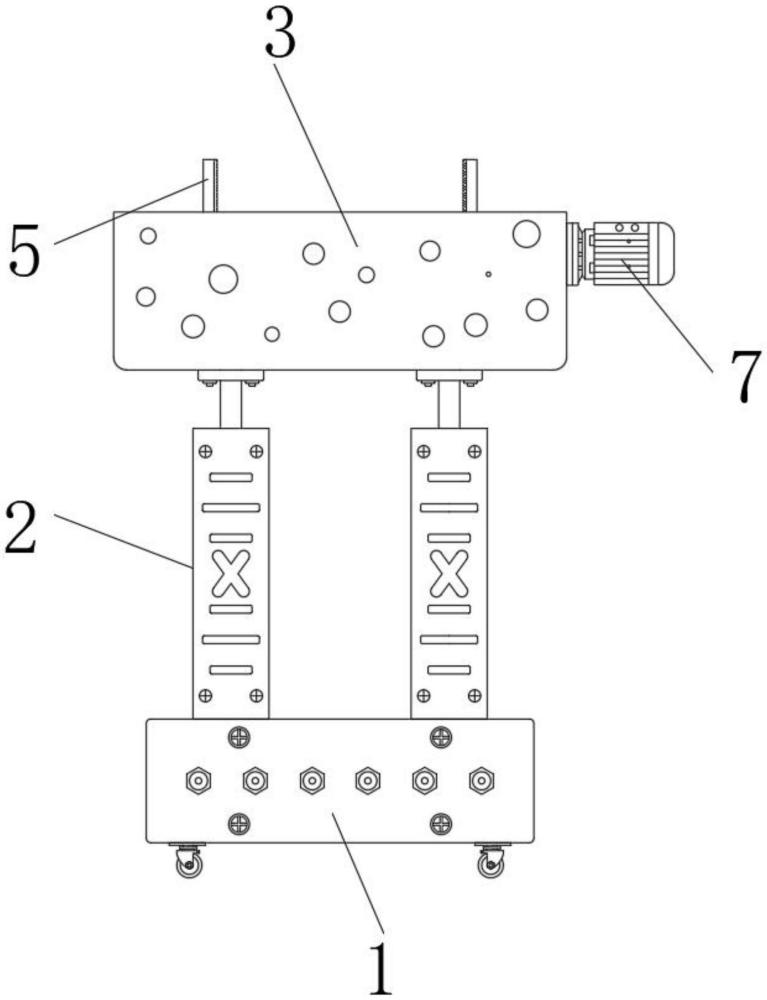
2、为实现上述目的,本实用新型提供如下技术方案:一种物流搬运机器人,包括驱动装置,所述驱动装置的顶端设置有支撑板,所述支撑板的内部开设有凹槽,所述支撑板外壁的一侧固定连接有电机,所述电机的输出轴固定连接有双向螺纹杆,所述双向螺纹杆的外侧壁螺纹连接有螺纹套,所述螺纹套的顶端固定连接有夹持板,所述夹持板外壁的一侧固定连接有海绵块,所述支撑板顶端的中间位置开设有滑槽,所述夹持板的一端贯穿滑槽的内部;
3、所述驱动装置顶部的两端均设置有升降组件,所述升降组件包括固定箱,所述固定箱的底端与驱动装置的顶端固定连接,所述固定箱的内部为中空结构,所述固定箱内部的底壁固定连接有液压机,所述液压机的顶端固定连接有滑套,所述滑套的顶端固定连接有支撑杆,所述固定箱内壁的两侧均固定连接有导杆。
4、通过采用上述技术方案,能够实现对快件的稳定夹持。
5、优选的,所述驱动装置的底端安装有驱动轮。
6、通过采用上述技术方案,能够实现对快件的运输。
7、优选的,所述驱动装置与固定箱之间构成焊接结构一体化。
8、通过采用上述技术方案,能够提高驱动装置与固定箱连接的稳定性。
9、优选的,所述导杆与滑套之间呈滑动连接。
10、通过采用上述技术方案,能够提高支撑杆在移动时的稳定性。
11、优选的,所述支撑杆的一端贯穿固定箱内部的顶壁,所述支撑杆的一端与支撑板的底端固定连接。
12、通过采用上述技术方案,便于通过支撑杆对支撑板与快件进行高度调节。
13、优选的,所述双向螺纹杆的一端贯穿支撑板内壁的一侧。
14、通过采用上述技术方案,便于通过双向螺纹杆的转动带动螺纹套进行移动。
15、与现有技术相比,本实用新型的有益效果是:
16、首先,通过设置有凹槽、双向螺纹杆、夹持板、滑槽、电机、海绵块以及螺纹套,通过部件之间的相互配合,方便了该种物流搬运机器人内夹持板与海绵块对快件的夹持,提高了该种物流搬运机器人快件在运输时的稳定性;最后,通过设置有升降组件、固定箱、液压机、导杆、支撑杆以及滑套,通过部件之间的相互配合,实现了该种物流搬运机器人内液压机与支撑杆对支撑板与快件高度的调节,提高了该种物流搬运机器人的适用性。
技术特征:
1.一种物流搬运机器人,包括驱动装置(1),其特征在于:所述驱动装置(1)的顶端设置有支撑板(3),所述支撑板(3)的内部开设有凹槽(9),所述支撑板(3)外壁的一侧固定连接有电机(7),所述电机(7)的输出轴固定连接有双向螺纹杆(4),所述双向螺纹杆(4)的外侧壁螺纹连接有螺纹套(8),所述螺纹套(8)的顶端固定连接有夹持板(5),所述夹持板(5)外壁的一侧固定连接有海绵块(10),所述支撑板(3)顶端的中间位置开设有滑槽(6),所述夹持板(5)的一端贯穿滑槽(6)的内部;
2.根据权利要求1所述的一种物流搬运机器人,其特征在于:所述驱动装置(1)的底端安装有驱动轮。
3.根据权利要求1所述的一种物流搬运机器人,其特征在于:所述驱动装置(1)与固定箱(201)之间构成焊接结构一体化。
4.根据权利要求1所述的一种物流搬运机器人,其特征在于:所述导杆(203)与滑套(205)之间呈滑动连接。
5.根据权利要求1所述的一种物流搬运机器人,其特征在于:所述支撑杆(204)的一端贯穿固定箱(201)内部的顶壁,所述支撑杆(204)的一端与支撑板(3)的底端固定连接。
6.根据权利要求5所述的一种物流搬运机器人,其特征在于:所述双向螺纹杆(4)的一端贯穿支撑板(3)内壁的一侧。
技术总结
本技术公开了一种物流搬运机器人,本技术包括驱动装置,所述驱动装置的顶端设置有支撑板,所述支撑板的内部开设有凹槽,所述支撑板外壁的一侧固定连接有电机,所述电机的输出轴固定连接有双向螺纹杆,所述双向螺纹杆的外侧壁螺纹连接有螺纹套,所述螺纹套的顶端固定连接有夹持板,所述夹持板外壁的一侧固定连接有海绵块,所述支撑板顶端的中间位置开设有滑槽,所述夹持板的一端贯穿滑槽的内部。本技术通过设置有凹槽、双向螺纹杆、夹持板、滑槽、电机、海绵块以及螺纹套,通过部件之间的相互配合,方便了该种物流搬运机器人内夹持板与海绵块对快件的夹持,提高了该种物流搬运机器人快件在运输时的稳定性。
技术研发人员:董金鑫,田义东
受保护的技术使用者:合肥月出工业设计有限公司
技术研发日:20230404
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!