轨道吊智能化安全诊断系统的制作方法
本技术涉及集装箱,具体是轨道吊智能化安全诊断系统。
背景技术:
1、集装箱是国际物流的主要运输装备,国际货运中有90%是通过集装箱运输来完成的。集装箱箱号是集装箱的唯一标识符,在集装箱管理中起着十分重要的作用。目前,我国许多集装箱码头的堆场管理和装卸船管理均已实现计算机化,但集装箱码头大门、集装箱起重机、大桥吊等处的集装箱箱号状态还依靠着人眼的观察。导致工作效率低下,加大了操作员负担,导致搬运集装箱存在安全风险。
2、针对上述的问题,有一些解决的技术方案,例如:中国内公开一份申请号为:cn202122539742.x,本实用新型具体涉及一种集装箱防误吊集卡安全识别系统,该结构包括主架安装有操作室,主架安装有电动机,电动机与吊具相连接,吊具上设有激光测距传感器,激光测距传感器连接有第二无线透传器,第二无线透传器连接有电源模块,电源模块还分别连接有第一无线透传器和第一plc可编程控制器cp1h,第一plc可编程控制器cp1h与第一无线透传器的公共端连接有称重仪,第一plc可编程控制器cp1h连接有第二plc可编程控制器sc1g,操作室内设有能与第一无线透传器和第二无线透传器相互无线通信的安全监控仪。本该结构方案需对进一步完善,需要提升安全系统监测;另外,火车卡因激光偶尔扫到两端相邻集装箱或扫到木板的缝隙里,出现误报或漏报等问题。
技术实现思路
1、本实用新型的目的在于克服上述的技术问题而提出一种吊智能化安全诊断系统,能提升安全系统监测和防止误报或漏报等问题。
2、本实用新型描述的轨道吊智能化安全诊断系统,包括主架安装有操作室,主架安装有电动机,电动机与吊具相连接,操作室内安装有plc可编程控制器cp1h,吊具的两侧设有用于检测吊具垂直方向位置的激光测距传感器,吊具的顶表面还设有用于检测四周距离的智能测距仪,智能测距仪与plc可编程控制器cp1h相电连接,激光测距传感器和智能测距仪之间通过第二无线透传器相连接,第一plc可编程控制器cp1h与第二无线透传器相连接。
3、具体进一步,所述智能测距仪分为第一智能测距仪、第二智能测距仪、第三智能测距仪和第四智能测距仪,第一智能测距仪、第二智能测距仪、第三智能测距仪和第四智能测距仪分别位于吊具的顶表面。
4、具体进一步,所述激光测距传感器分为第一激光测距传感器、第二激光测距传感器、第三激光测距传感器和第四激光测距传感器,第一激光测距传感器、第二激光测距传感器、第三激光测距传感器和第四激光测距传感器分别位于吊具的侧表面。
5、具体进一步,所述激光测距传感器连接有第二无线透传器,第二无线透传器连接有电源模块,电源模块还分别连接有第一无线透传器,第一plc可编程控制器cp1h与第一无线透传器的公共端连接有称重仪,第一plc可编程控制器cp1h连接有第二plc可编程控制器sc1g,操作室内设有能与第一无线透传器和第二无线透传器相互无线通信的安全监控仪。
6、具体进一步,所述第一plc可编程控制器cp1h设有第一串口和第二串口,称重仪和第一无线透传器的公共端连接于第一串口上。
7、具体进一步,所述主架上安装有第一摄像头,第一摄像头还依次连接有网络交换机、视频录像机和视频显示器。
8、具体进一步,所述网络交换机还连接有第二摄像头,第二摄像头固定于操作室上。
9、具体进一步,所述网络交换机、视频录像机和视频显示器位于操作室内。
10、具体进一步,所述吊具夹持有集装箱,所述操作室内设有操作杆箱,操作杆箱内设有0点和上升点位,0点和上升点位分别连接于第一plc可编程控制器cp1h上。
11、具体进一步,所述吊具(16)的顶表面设有凹位,凹位内设有电动缸,电动缸与智能测距仪相连接。
12、本实用新型的有益效果:本结构通过吊具还设有激光测距传感器和智能测距仪,实施扫描集装箱的上下方向和四周的间距,实施安全系统监测运行;另外,智能测距仪通过电动缸实施收纳于凹位内,以防止在堆场作业时被集装箱撞坏,在伸缩过程1秒时间,不会影响起升作业的效率,有效解决火车卡因激光偶尔扫到两端相邻集装箱或扫到木板的缝隙里,出现误报或漏报。
技术特征:
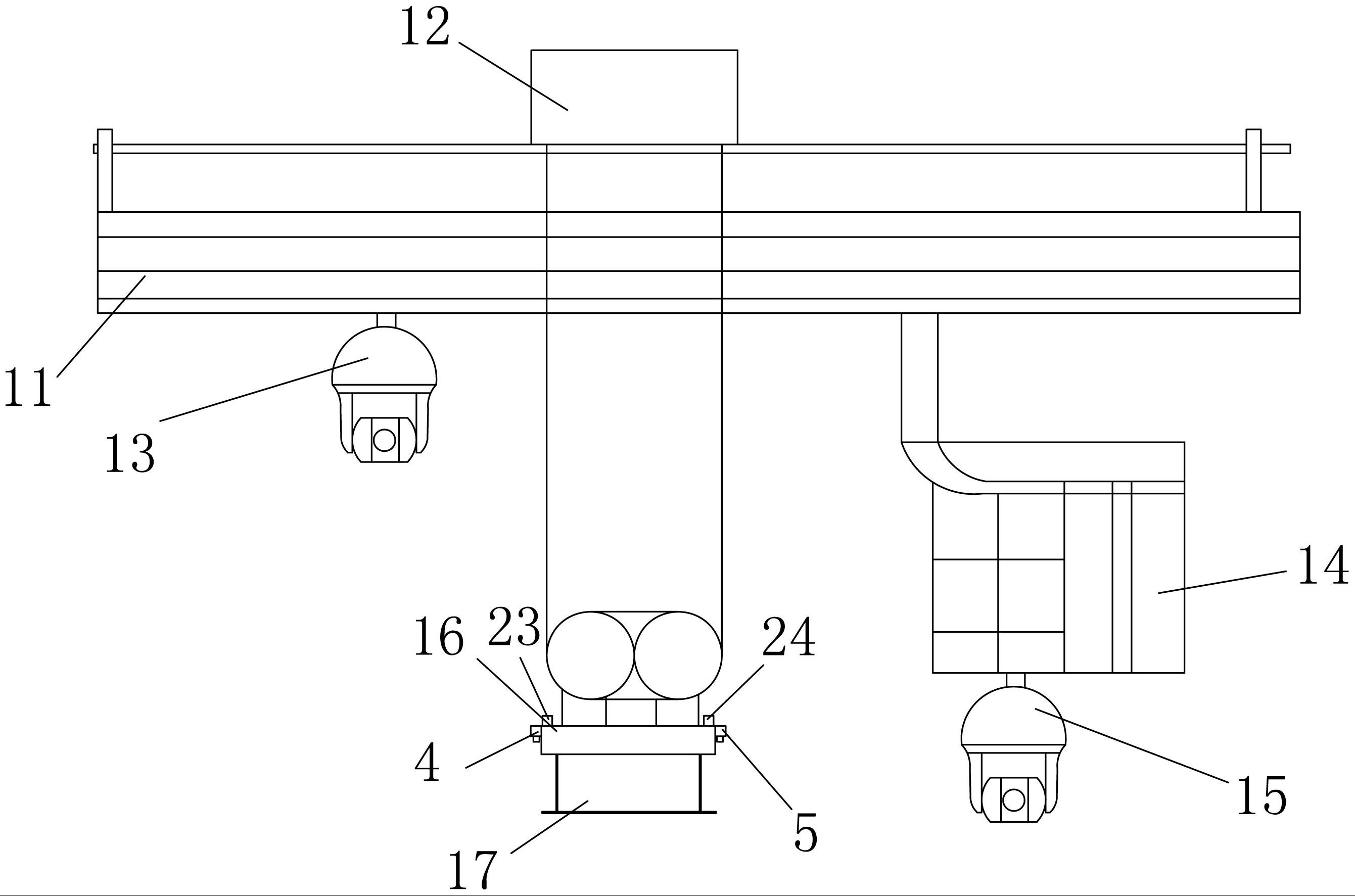
1.一种轨道吊智能化安全诊断系统,包括主架(11)安装有操作室(14),主架(11)安装有电动机(12),电动机(12)与吊具(16)相连接,操作室(14)内安装有plc可编程控制器cp1h,其特征在于:吊具(16)的两侧设有用于检测吊具(16)垂直方向位置的激光测距传感器,吊具(16)的顶表面还设有用于检测四周距离的智能测距仪,智能测距仪与plc可编程控制器cp1h相电连接,激光测距传感器和智能测距仪之间通过第二无线透传器(3)相连接,第一plc可编程控制器cp1h与第二无线透传器(3)相连接。
2.根据权利要求1所述轨道吊智能化安全诊断系统,其特征在于:所述智能测距仪分为第一智能测距仪(23)、第二智能测距仪(24)、第三智能测距仪(25)和第四智能测距仪(26),第一智能测距仪(23)、第二智能测距仪(24)、第三智能测距仪(25)和第四智能测距仪(26)分别位于吊具(16)的顶表面。
3.根据权利要求1所述轨道吊智能化安全诊断系统,其特征在于:所述激光测距传感器分为第一激光测距传感器(4)、第二激光测距传感器(5)、第三激光测距传感器(6)和第四激光测距传感器(7),第一激光测距传感器(4)、第二激光测距传感器(5)、第三激光测距传感器(6)和第四激光测距传感器(7)分别位于吊具(16)的侧表面。
4.根据权利要求1所述轨道吊智能化安全诊断系统,其特征在于:所述激光测距传感器连接有第二无线透传器(3),第二无线透传器(3)连接有电源模块(1),电源模块(1)还分别连接有第一无线透传器(2)和,第一plc可编程控制器cp1h与第一无线透传器(2)的公共端连接有称重仪(8),第一plc可编程控制器cp1h连接有第二plc可编程控制器sc1g,操作室(14)内设有能与第一无线透传器(2)和第二无线透传器(3)相互无线通信的安全监控仪(22)。
5.根据权利要求4所述轨道吊智能化安全诊断系统,其特征在于:所述第一plc可编程控制器cp1h设有第一串口(9)和第二串口(10),称重仪(8)和第一无线透传器(2)的公共端连接于第一串口(9)上。
6.根据权利要求1所述轨道吊智能化安全诊断系统,其特征在于:所述主架(11)上安装有第一摄像头(13),第一摄像头(13)还依次连接有网络交换机(19)、视频录像机(20)和视频显示器(21)。
7.根据权利要求6所述轨道吊智能化安全诊断系统,其特征在于:所述网络交换机(19)还连接有第二摄像头(15),第二摄像头(15)固定于操作室(14)上。
8.根据权利要求6所述轨道吊智能化安全诊断系统,其特征在于:所述网络交换机(19)、视频录像机(20)和视频显示器(21)位于操作室(14)内。
9.根据权利要求4所述轨道吊智能化安全诊断系统,其特征在于:所述吊具(16)夹持有集装箱(17),所述操作室(14)内设有操作杆箱,操作杆箱内设有0点和上升点位,0点和上升点位分别连接于第一plc可编程控制器cp1h上。
10.根据权利要求1所述轨道吊智能化安全诊断系统,其特征在于:所述吊具(16)的顶表面设有凹位(1601),凹位(1601)内设有电动缸(2301),电动缸(2301)与智能测距仪相连接。
技术总结
本技术具体涉及一种轨道吊智能化安全诊断系统,包括主架安装有操作室,主架安装有电动机,电动机与吊具相连接,操作室内安装有PLC可编程控制器CP1H,吊具的两侧设有用于检测吊具垂直方向位置的激光测距传感器,吊具的顶表面还设有用于检测四周距离的智能测距仪,智能测距仪与PLC可编程控制器CP1H相电连接,激光测距传感器和智能测距仪之间通过第二无线透传器相连接,第一PLC可编程控制器CP1H与第二无线透传器相连接。本技术的有益效果:通过吊具还设有激光测距传感器和智能测距仪,实施扫描集装箱上下方向和四周的间距,实施安全系统监测运行。
技术研发人员:张品,林弈润,彭剑
受保护的技术使用者:北部湾港防城港码头有限公司
技术研发日:20230414
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!