一种侧装式垃圾收运车自动抓取机械手
本技术涉及机械手,确切地说是一种侧装式垃圾收运车自动抓取机械手。
背景技术:
1、据中国城市环境卫生协会统计,我国每年产生近10亿吨垃圾,其中生活垃圾产生量约4亿吨,建设垃圾5亿吨左右,此外,还有餐厨垃圾1000万吨左右。垃圾一般收集在公用的垃圾桶内,再由垃圾运输车辆将垃圾桶内的垃圾运输到处理站进行分类处理。垃圾车装垃圾过程中,将垃圾桶内的垃圾装车由两种方式,一是环卫工人手动操作完成,二是通过机械手夹取操作。
2、其中,人工操作,卫生状况差、工作强度高、装卸速度慢。
3、机械手夹取操作,一般是侧装式压缩垃圾车,其设有的机械手用于完成对道路两旁等待处理的垃圾桶抓取、抱桶、回缩、提升、翻转、垃圾倾倒及复位垃圾桶等动作。如中国专利cn215556298u公开的一种侧装压缩自卸式垃圾车,其夹取部分采用两指夹取结构,并且夹子表面没有铺设缓冲橡胶带,末端没有缓冲轮,容易将垃圾桶夹瘪、夹烂。
技术实现思路
1、本实用新型要解决的技术问题是提供一种侧装式垃圾收运车自动抓取机械手,该机械手采用单指夹爪和双指夹爪配合,为三指夹取结构,且单指夹爪和双指夹爪夹持表面设有黑色橡胶带,有效防止将垃圾桶夹瘪、夹烂。
2、为解决上述技术问题,本实用新型采用如下技术手段:
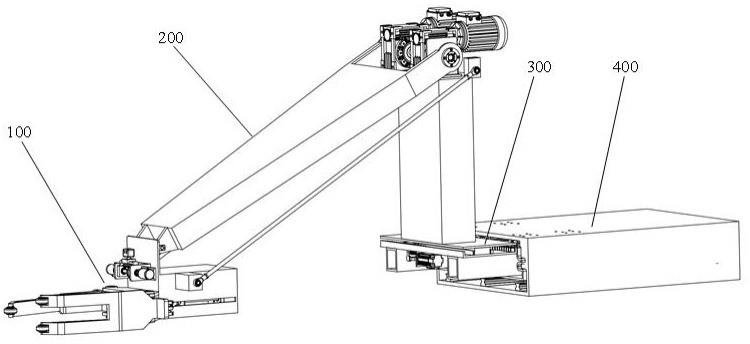
3、一种侧装式垃圾收运车自动抓取机械手,包括抓取机构,举升翻转机构、位姿调整机构、伸缩机构,所述的抓取机构连接设置在举升翻转机构上,举升翻转机构设置在位姿调整机构上,位姿调整机构设置在伸缩机构上,伸缩机构设置在垃圾收运车上;所述的抓取机构设有外壳,抓取机构的左右两边分别为与外壳铰接连接的单指夹爪和双指夹爪,在水平方向上,单指夹爪位于双指夹爪的中部的空隙处;单指夹爪和双指夹爪均与抓取拉杆的一端通过销轴、抓取鱼眼接头铰接连接;抓取拉杆的另一端通过销轴、抓取鱼眼接头与支撑挡板铰接连接;抓取拉杆由滚珠丝杠、线性滑块驱动,抓取拉杆受驱动带动单指夹爪和双指夹爪完成张开或闭合,单指夹爪和双指夹爪的表面还设有黑色橡胶带。
4、为提高夹持效果,单指夹爪和双指夹爪的末端均设置有橡胶轮。
5、抓取机构设有力学反馈系统,在单指夹爪和双指夹爪的周围布置有水平对置传感器,控制器根据通过水平对置传感器反馈的数据,可以精确计算夹取力矩。
6、采用上述技术方案的本实用新型,与现有技术相比,其突出的特点是:
7、本实用新型在水平方向上,单指夹爪位于双指夹爪的中部的空隙处;使得单指夹爪和双指夹爪相配合,为三指夹取结构,且单指夹爪和双指夹爪夹持表面设有黑色橡胶带,有效防止将垃圾桶夹瘪、夹烂。
8、进一步的优选技术方案如下:
9、所述的单指夹爪和双指夹爪通过夹爪转轴,转轴轴承和转轴安装座与外壳铰接在一起。
10、所述的举升翻转机构包括驱动臂,蜗轮蜗杆减速机,翻转驱动电机,输出轴,圆柱滚珠轴承,轴承安装座,倾倒台,举升拉杆,高支架梁,双目摄像头组件;驱动臂下端通过销轴与外壳连接在一起,驱动臂的上端与输出轴固定连接,翻转驱动电机通过蜗轮蜗杆减速机驱动输出轴转动带动驱动臂绕输出轴转动;驱动臂下侧设有与其间隔设置的举升拉杆,举升拉杆的两端分别与高支架梁、外壳铰接;举升拉杆与驱动臂配合;外壳在安装举升翻转机构的一端连接设置双目摄像头组件,双目摄像头组件包括双目摄像头、安装底座与驱动电机,驱动电机安装在安装底座上驱动双目摄像头转动;双目摄像头组件用于实时采集垃圾桶图像,并将图像传递到中央控制器中。
11、所述的翻转驱动电机、蜗轮蜗杆减速机安装在倾倒台,倾倒台安装在高支架梁顶端,高支架梁安装在位姿调整机构上;举升拉杆两端安装鱼眼接头,并在鱼眼接头处安装铰接轴;双目摄像头组件还包括1号电机、1号联轴器、2号电机、2号联轴器、轴承、摄像头支座、初级传动轴、次级传动轴、初级圆锥齿轮、次级圆锥齿轮、电机安装座组成;安装底座左右外侧各有三角形肋板,起到稳定支撑的作用;安装底座左右两侧设有安装孔,安装孔内部安装有轴承;两个电机安装座对称安装在安装底座两侧;1号电机和2号电机分别安装于两个电机安装座上;1号电机与1号联轴器相连,2号电机和2号联轴器相连;固定轴一端为方形,另一端为圆形,方形端固定在摄像头支座内部;1号联轴器用于连接1号电机的和固定轴;2号联轴器用于连接2号电机和初级传动轴;初级圆锥齿轮固定在初级传动轴上,其与固定在上部的横向放置的次级传动轴上的次级圆锥齿轮呈90°啮合;2号电机工作时,带动初级传动轴与初级圆锥齿轮转动,次级圆锥齿轮在初级圆锥齿轮的带动下使得双目摄像头转动,完成双目摄像头的左右转动动作;1号电机工作时,直接带动摄像头支座转动,完成双目摄像头的上下转动动作;摄像头支座左侧与初级传动轴之间安装有轴承,所以1号电机转动时不会带动初级传动轴转动。
12、所述的位姿调整机构由安装底板、上板,锥齿轮组、齿轮齿条传动组件组成,安装底板、上板间隔设置,锥齿轮组设置在安装底板的底面上;安装底板、上板之间连接设置齿轮齿条传动组件,锥齿轮组通过齿轮齿条传动组件驱动上板在水平方向上运动;上板运动带动高支架梁运动。
13、所述的齿轮齿条传动组件包括一级齿轮齿条传动组件、二级齿轮齿条传动组件;所述的一级齿轮齿条传动组件包括一级齿轮、一级上齿条、一级下齿条和上滑块;所述一级上齿条固定安装于上滑块的侧面,一级下齿条可以在安装底板上部滑动,一级齿轮与一级上齿条和一级下齿条相啮合,一级齿轮安装在二级齿轮轴上由二级齿轮轴驱动;所述的二级齿轮齿条传动组件包括二级齿轮、二级上齿条、二级下齿条和下滑块;二级上齿条固定安装于安装底板上,二级下齿条固定安装于下滑块的侧面,二级齿轮与二级上齿条和二级下齿条相互啮合;下滑块 底部有圆面凸起与安装底板上的滑槽项配合,减小接触面积减低摩擦力便于下滑块的直线运动;连杆的一端通过销轴固定连接于上滑块上,连杆的另一端通过轴、轴承与二级齿轮连接;一级齿轮转动带动一级上齿条和一级下齿条做相向运动,二级齿轮带动下滑块运动;上滑块、下滑块受驱动同向运动,上滑块、下滑块分别与上板连接带动上板运动,上板运动带动高支架梁运动。
14、所述的安装底板下方固定在伸缩机构中可伸缩的方管上方,能够带动位姿调整机构进行直线运动;一级安装支架、二级安装支架成90°分布,一级安装支架、二级安装支架的一端均通过圆柱滚子轴承连接设置在一级齿轮轴上,一级安装支架的另一端连接设置在电机安装板上,二级安装支架的另一端连接设置在安装底板上;一级齿轮轴的一端通过键连接固定于电机输出轴上;二级圆锥齿轮通过键连接固定于一级齿轮轴上,二级圆锥齿轮与一级安装支架之间存在安装间隙;一级齿轮轴用于传递动力;二级齿轮轴一端通过键连接与三级齿轮固定,另一端通过键连接与一级齿轮齿条传动组件中的一级齿轮固定连接;所述的电机安装板固定安装于安装底板上,用于安装电机,电机驱动一级锥齿轮,一级锥齿轮与二级圆锥齿轮啮合,二级圆锥齿轮与三级齿轮啮合,三级齿轮带动二级齿轮轴转动。
15、所述的伸缩机构设有外支架、内支架,外支架与安装在垃圾箱车连接,内支架与外支架滑动连接,内支架由滑轨模组驱动运动;内支架的运动方向与上板的运动方向垂直。
16、所述的外支架内部分布有滑槽和凸起;内支架外侧分布有滑槽和凸起,用于和外支架上的滑槽和凸起相配合,便于内支架做直线运动;方管有三个,固定安装于内支架上,起到固定和支撑作用。
17、滑轨模组设有一级滑轨模组、二级滑轨模组及驱动模组;一级滑轨模组包括一级左滑轨、一级左滑块、一级右滑轨和一级右滑块;左滑轨、一级左滑块滑动配合,一级右滑轨和一级右滑块滑动配合,一级滑轨模组的部件安装于方管上;所述的二级滑轨模组包括二级左滑轨、二级左滑块、二级中滑轨、二级中滑块、二级右滑轨和二级右滑块;二级滑轨固定安装于外支架上,用于安装滑块,并给滑块提供运动平台。二级滑轨模组中的滑块固定安装于内支架上,用于带动内支架做直线运动;一级滑轨中的滑块固定安装于外支架上,一级滑轨与内支架一起做直线运动;一级滑块和二级滑块交叉分布,使内支架做直线运动时受力更加均匀;所述的驱动模组包括伺服电机、电机板、底板、丝杠、滑块、滑台块、滑轨,安装于外支架上,用于带动内支架做直线运动;有两个滑轨固定安装于底板上;有两个滑块安装于滑轨上;滑台块安装于两个滑块上,其下部与方管相固定;伺服电机转动,带动丝杠转动,丝杠带动滑台块转动,滑台块带动内支架整体运动。
18、与现有技术相比本实用新型的优点和积极效果是:
19、1. 抓取机构,其设有机械手组件、抓取驱动组件和外壳,机械手组件采用三指抓取的互补结构,并且在每个机械夹爪的末端设置有橡胶轮,在垃圾桶与夹爪表面接触的地方设置有橡胶皮带,橡胶轮和橡胶皮带相互配合,使本实用新型的抓取机构可以最大程度上降低夹爪夹坏垃圾桶的情况。
20、2. 设置力学反馈系统,通过水平对置传感器反馈的数据,可以精确计算夹取力矩,避免因夹取力矩控制不当把垃圾桶夹瘪甚至夹坏的情况出现。
21、3. 举升翻转机构采用伺服电机驱动,动作可靠稳定且反应迅速,当遇到突发情况时可及时作出相应的反应动作;举升翻转机构还设有双目摄像头组件,采用锥齿轮传动的方式,可以实现摄像头的左右摇头动作和前后点头动作,达到全方位无死角的图像采集;该摄像头组件与视觉辅助系统连接向其传输图像信息,使驾驶员只需通过车内视觉显示器即可观察外部所有状况并能够准确进行抓取动作完成垃圾收运工作。本实用新型视觉辅助系统包括视觉控制器、视觉显示器,视觉辅助系统为控制系统的一部分,由控制系统的控制器控制工作。
22、5. 位姿调整机构设有安装底板、上板、一级齿轮齿条传动组件、二级齿轮齿条传动组件、电机和电机安装支架,巧妙的使用齿轮齿条的传动方式,精准实现机械手横向的位姿调整,结合视觉辅助系统精确抓取垃圾桶;位姿调整机构使用锥齿轮的传动改变了动力传递路线,缩小了安装空间,又起到减速增距的作用。
23、7. 伸缩机构设有外支架、内支架、驱动模组、一级滑轨模组、二级滑轨模组和方管,内支架外表面和外支架内表面设有相互配合的滑槽和凸起可以降低两支架相互滑动时的摩擦力,使运动更加顺畅;一级滑轨模组和二级滑轨模组中的滑块采用交叉布置得到方式,使内支架在运动的过程中受力更加均匀,提高使用寿命。
24、9. 采用伺服电机控制丝杠传动的方式,控制平稳,全部实现电路控制,适用于新能源汽车车型,满足大部分车型。
- 还没有人留言评论。精彩留言会获得点赞!