一种灵巧型智能仓储机构的制作方法
本技术涉及自动化存储机构领域,具体涉及一种灵巧型智能仓储机构。
背景技术:
1、在非标自动化的技能培训设备领域,目前有些非标自动化培训平台主要专注于理论和软件的培训和体验,缺少实际的执行机构和工业级应用场景的体验。在这种情况下实际的培训效果大打折扣,受训者在学下过程中并不能直接接触工业级应用场景,通常只是纸上谈兵,并无真实实战的参与感和成就感,实质是缺少很适合的自动化教具。
2、自动化教具某种意义上就是复刻实际的应用场景,在解决实际问题中学习自动化思维。现在需要简历一个与自动化流水线所搭配的存储机构,用于摆放较多数量的工件,实现工件的进料、出料。但是自动化教具的应用需求也决定了这种存储机构要尽量体积小、成本低,如果直接等比例缩小现有存储机构,体积有下限,同时搭配的机械手成本也高。
技术实现思路
1、本实用新型要解决的问题在于提供一种灵巧型智能仓储机构,让存储机构结构紧凑、体积小,负责进出料的转移机构动作简单可靠,降低了机械手成本与动作难度,适用于自动化教具领域。
2、为解决上述问题,本实用新型提供一种灵巧型智能仓储机构,为达到上述目的,本实用新型解决其技术问题所采用的技术方案是:
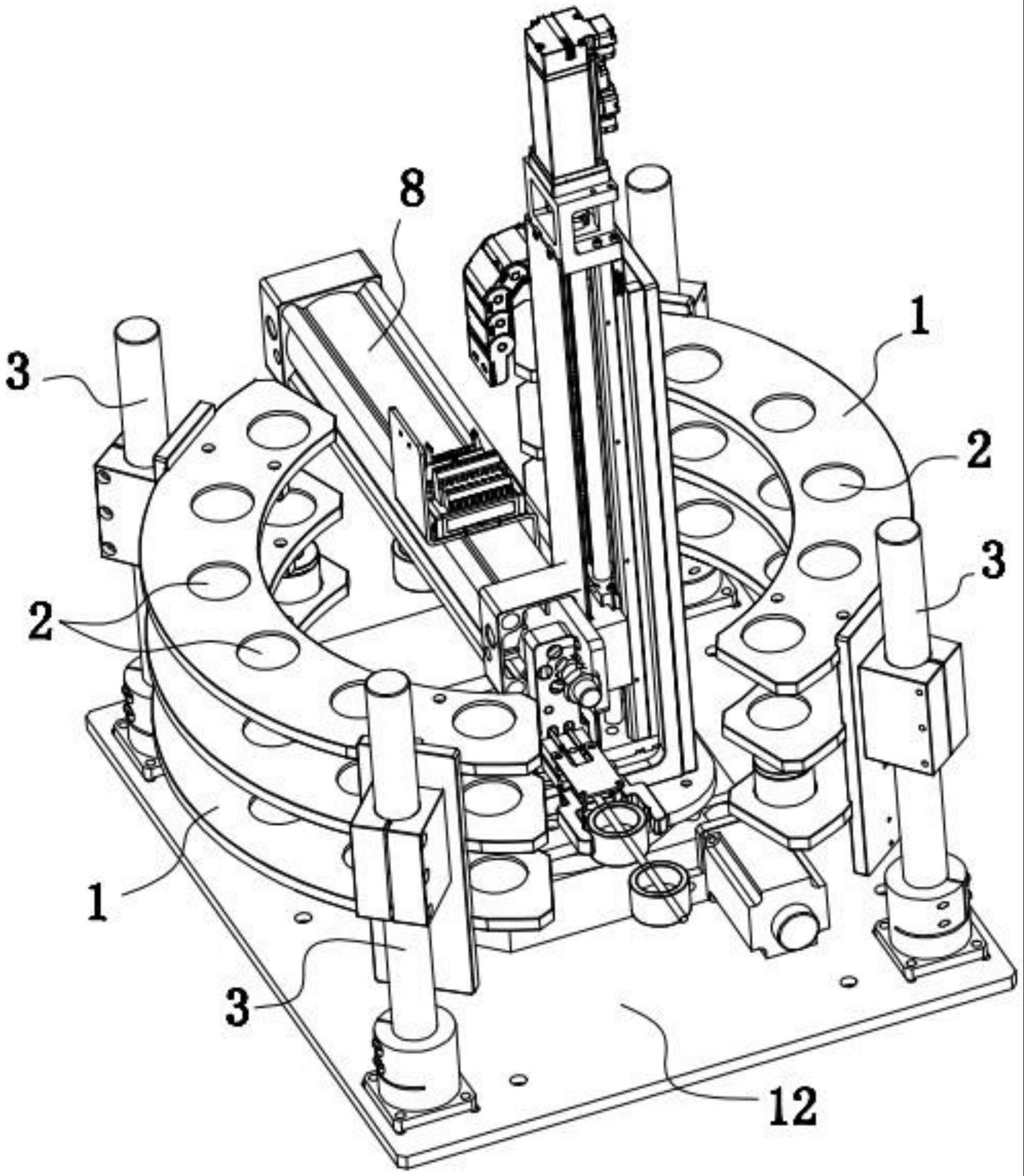
3、一种灵巧型智能仓储机构,包括:储位架,若干个弧形板相互竖向间隔布置,弧形板通过立柱相连,同一储位架上的弧形板相互之间的竖向投影重合;两个储位架呈镜像对称布置;同一水平高度上,两个储位架各自弧形板的中心轨迹线重合于同一个圆上;转移机构,位于两个储位架之间,转移机构包括旋转台,旋转台上固定有水平与竖向直线动作机构,水平与竖向直线动作机构的末端具备夹爪,夹爪往弧形板上拿放工件;两个储位架之间构成供夹爪进出的间隙。
4、采用上述技术方案的有益效果是:本技术方案的存储机构结构紧凑、体积小,同时负责进出料的转移机构自由度可以较少,动作机构简单,无需采用高昂的机械手,这样就降低了成本,适宜自动化教具领域。
5、两个储位架对转移机构起到包围,但是又预留了进出料的间隙,弧形板围成一个圈,使得夹爪每次拿放工件时水平的伸缩量都是相同的,这简化了动作编程。当需要从不同高度的弧形板上拿取工件时,只需要改变高度的转移机构。当需要拿取同一高度弧形板上不同位置的工件时,只需要旋转盘驱动一定角度。
6、作为本实用新型的进一步改进,弧形板的中心轨迹线为劣弧,每个储位架至少具备两根立柱、三片弧形板。
7、采用上述技术方案的有益效果是:弧形板构成的储位架不是全包围机构。但是也提供了多层摆放防止,能存放较多量的工件。
8、作为本实用新型的更进一步改进,每个弧形板的上表面等间距布置有若干个限位坑,限位坑的底面与工件的底面相互凹凸吻合。
9、采用上述技术方案的有益效果是:限位坑可以避免工件滑落,从而确定了一个个准确的工件摆放位。
10、作为本实用新型的又进一步改进,弧形板中心轨迹线的圆心位于旋转台的轴线上,旋转台由伺服电机驱动。
11、采用上述技术方案的有益效果是:保证旋转台可以精装转动一定角度,当夹爪精准指向某一工件。
12、作为本实用新型的又进一步改进,水平与竖向直线动作机构包括竖向直线模组、水平直线气缸,竖向直线模组的底部与旋转台固定,水平直线气缸与竖向直线模组的滑座固定。
13、采用上述技术方案的有益效果是:转移机构具备两个直线自由度、一个旋转自由度,整体简单可靠。
14、作为本实用新型的又进一步改进,夹爪为水平直线气缸的输出杆顶端的手指气缸,手指气缸通过一对夹指来夹持工件。
15、采用上述技术方案的有益效果是:手指气缸的张开与闭合来最终实现工件的拿放。
16、作为本实用新型的又进一步改进,间隙位于弧形板端头与另一储位架的弧形板端头之间;水平直线气缸的最低极限位置位于储位架的上方,水平直线气缸的输出杆固定有下延块,手指气缸的缸体与下延块的底部固定。
17、采用上述技术方案的有益效果是:由于储位架结构紧凑,但是水平直线气缸整体又较长,这样出料时才能将工件从间隙中伸出足够距离。下延块的设计使得水平直线气缸不会与储位架发生干涉,但同时夹爪又能达到最底层的弧形板。
18、作为本实用新型的又进一步改进,弧形板通过夹块与立柱实现可拆卸地装配。
19、采用上述技术方案的有益效果是:弧形板的数量、竖向间距是可调的,以适应工件的大小、数量。
20、作为本实用新型的又进一步改进,立柱的底部共同固定有一块底板,底板的下表面固定有机架。
21、采用上述技术方案的有益效果是:整个智能仓储机构可以稳定布置在自动化流水线上。
技术特征:
1.一种灵巧型智能仓储机构,其特征在于,包括:
2.根据权利要求1所述的灵巧型智能仓储机构,其特征在于:所述弧形板的中心轨迹线为劣弧,每个储位架至少具备两根立柱、三片弧形板。
3.根据权利要求1所述的灵巧型智能仓储机构,其特征在于:每个弧形板的上表面等间距布置有若干个限位坑,所述限位坑的底面与工件的底面相互凹凸吻合。
4.根据权利要求1所述的灵巧型智能仓储机构,其特征在于:所述弧形板中心轨迹线的圆心位于旋转台的轴线上,所述旋转台由伺服电机驱动。
5.根据权利要求4所述的灵巧型智能仓储机构,其特征在于:所述水平与竖向直线动作机构包括竖向直线模组、水平直线气缸,所述竖向直线模组的底部与旋转台固定,所述水平直线气缸与竖向直线模组的滑座固定。
6.根据权利要求5所述的灵巧型智能仓储机构,其特征在于:所述夹爪为水平直线气缸的输出杆顶端的手指气缸,所述手指气缸通过一对夹指来夹持工件。
7.根据权利要求6所述的灵巧型智能仓储机构,其特征在于:所述间隙位于弧形板端头与另一储位架的弧形板端头之间;所述水平直线气缸的最低极限位置位于储位架的上方,所述水平直线气缸的输出杆固定有下延块,所述手指气缸的缸体与下延块的底部固定。
8.根据权利要求1所述的灵巧型智能仓储机构,其特征在于:所述弧形板通过夹块与立柱实现可拆卸地装配。
9.根据权利要求1所述的灵巧型智能仓储机构,其特征在于:所述立柱的底部共同固定有一块底板,所述底板的下表面固定有机架。
技术总结
本技术公开了一种灵巧型智能仓储机构,包括储位架,若干个弧形板相互竖向间隔布置,弧形板通过立柱相连,同一储位架上的弧形板相互之间的竖向投影重合;两个储位架呈镜像对称布置;同一水平高度上,两个储位架各自弧形板的中心轨迹线重合于同一个圆上;转移机构,位于两个储位架之间,转移机构包括旋转台,旋转台上固定有水平与竖向直线动作机构,水平与竖向直线动作机构的末端具备夹爪,夹爪往弧形板上拿放工件;两个储位架之间构成供夹爪进出的间隙。采用此技术让存储机构结构紧凑、体积小,负责进出料的转移机构动作简单可靠,降低了机械手成本与动作难度,适用于自动化教具领域。
技术研发人员:朱丽军,孙青海,郑永俊
受保护的技术使用者:苏州恒途教育科技有限公司
技术研发日:20230420
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!