一种智能垃圾桶的柔性打包机构的制作方法
本技术涉及智能垃圾桶,具体为一种智能垃圾桶的柔性打包机构。
背景技术:
1、智能垃圾桶相对普通垃圾桶而言,其盖子可以通过感应器来开和关,不用手动和脚踩,现有的智能垃圾桶实现打包功能的方式有单杆、双杆、三杆和四杆。
2、(1)单杆结构为打包杆两侧分别固定在两根平行的光轴上,打包熔断模块安装在底板上,打包杆通过两侧的同步带和同步带轮与两个电机链接来保持大包杆运动时与熔断模块平行,安装打包杆的两根光轴一段与熔断模块链接,另一端与底座链接。
3、(2)双杆结构为相互垂直的两根打包杆,熔断模块固定在底座的一个角落,通过连根垂直的打包杆同时或一次移动,使垃圾袋收拢到加热模块处。
4、(3)三杆结构为三根打包杆,其中两根相互平行位于垃圾口的两侧,另一根与这两根垂直并与熔断模块平行,熔断模块安装在底座上并位于两根平行打包杆中间。
5、(4)四杆结构为成井字排列的四根打包杆,熔断模块安装在其中一根打包杆上。
6、但是现有的智能垃圾桶在使用过程中存在以下不足,比如:
7、(1)现有单杆方案为双电机控制一根打包杆,有电机差速导致打包杆左右运动不同步,打包杆卡顿的概率从而影响打包效果,且双电机成本高。
8、(2)现有双杆打包方案时把垃圾带收拢到一个角落,无法保证这个熔解部分垃圾带的厚度相对均匀,容易造成下一个垃圾袋液体渗漏。
9、(3)现有三杆打包机构能优化双杆结构的垃圾袋均匀问题,但三根打包杆最少需要两个电机驱动或者单电机加连杆结构驱动,双电机时成本高,单电机时结构复杂,连杆机构多无法保证平行的两根打包杆同步运动。
10、(4)现有四杆打包方案同样需要双电机,或者单电机加多连杆可能存在的风险与三杆结构相同,另外四杆结构熔断模组安装在运动的打包杆上存在电器件拉扯时效的风险。
11、故而提出一种智能垃圾桶的柔性打包机构来解决上述所提出的问题。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种智能垃圾桶的柔性打包机构,具备与现有的智能垃圾桶相比,采用柔性线进行打包,舍弃了利用打包杆进行打包的方式,且打包机构与熔断机构分离,避免了熔断模组安装在运动的打包杆上存在电器件拉扯时效的风险等优点,解决了现有智能垃圾桶利用打包杆进行打包而存在的问题,且解决了现有智能垃圾桶采用四杆结构进行打包时,熔断模组安装在运动的打包杆上存在电器件拉扯时效的风险的问题。
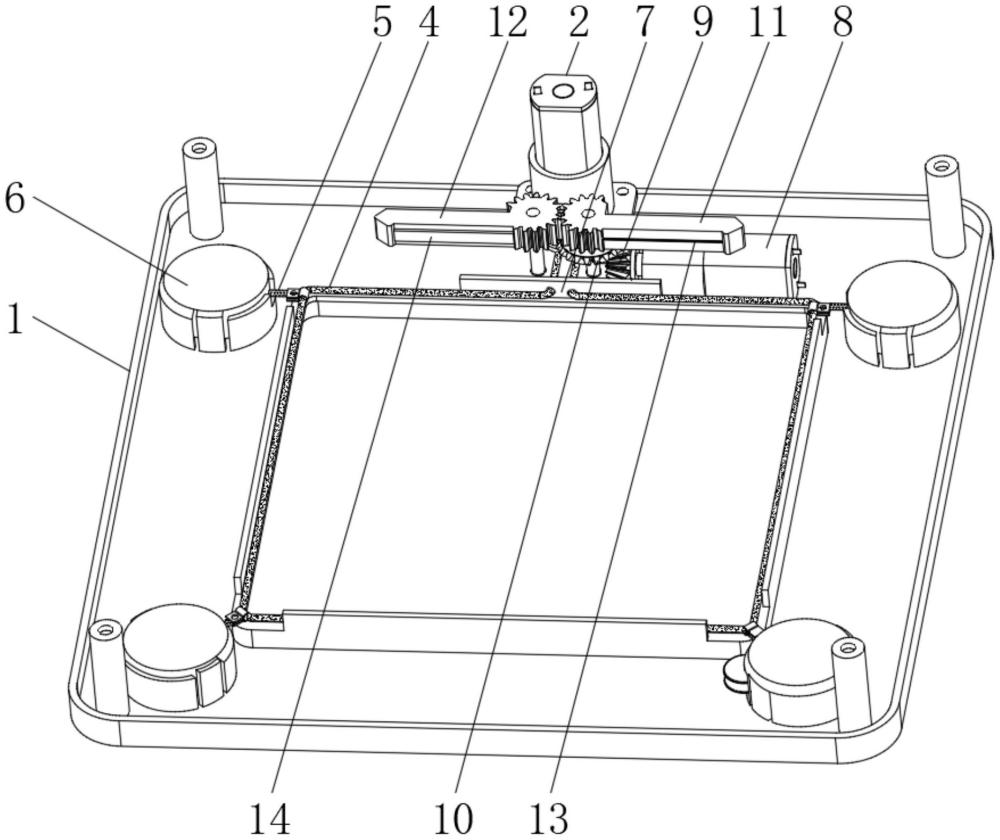
2、为实现上述目的,本实用新型提供如下技术方案:一种智能垃圾桶的柔性打包机构,包括垃圾桶基座,所述垃圾桶基座的顶部后侧设置有第一驱动电机,所述第一驱动电机的输出轴底部固定连接有收紧轮,所述收紧轮的外部活动连接有收紧绳,所述收紧绳的外部通过绳扣固定连接有导向绳,所述垃圾桶基座的顶部设置有卷簧,所述卷簧的内部与导向绳活动连接,所述收紧绳的两端均固定在收紧轮上,所述垃圾桶基座的顶部固定连接有限位条,所述限位条的内部开设有两个通孔,且限位条的内部通过两个通孔与收紧绳滑动连接。
3、进一步,所述卷簧的数量为四个且分别分布在垃圾桶基座的桶口四角,所述导向绳的数量为四个,四个所述导向绳远离收紧绳的一端固定在卷簧内。
4、进一步,所述垃圾桶基座的顶部设置有第二驱动电机,所述第二驱动电机的输出轴左侧固定连接有第一斜齿轮,所述第一斜齿轮的外部啮合有第二斜齿轮,所述第二斜齿轮的顶部固定连接有熔接臂,所述熔接臂的左侧啮合有压紧臂,所述第二斜齿轮的底部和压紧臂的底部均与垃圾桶基座通过转杆转动连接。
5、进一步,所述熔接臂的前侧设置有发热丝,所述压紧臂的前侧设置有隔热条。
6、与现有技术相比,本申请的技术方案具备以下有益效果:
7、该智能垃圾桶的柔性打包机构,第一驱动电机带动收紧轮转动,收紧轮将收紧绳收卷,收紧绳收卷过程中带动导向绳移动,将收紧绳和导向绳的四个连接处相互接近而汇聚于限位条处,收紧绳和导向绳的四个连接处在相互接近的同时将垃圾袋收束,第二驱动电机带动第一斜齿轮、第二斜齿轮和熔接臂转动,熔接臂带动压紧臂往与熔接臂转动的相反方向转动,使得熔接臂上的发热丝与压紧臂上的隔热条夹住垃圾袋,发热丝通电加热对垃圾袋进行熔接并熔断,完成垃圾袋的打包,采用柔性线进行打包,舍弃了利用打包杆进行打包的方式,且打包机构与熔断机构分离,避免了熔断模组安装在运动的打包杆上存在电器件拉扯时效的风险。
技术特征:
1.一种智能垃圾桶的柔性打包机构,包括垃圾桶基座(1),其特征在于:所述垃圾桶基座(1)的顶部后侧设置有第一驱动电机(2),所述第一驱动电机(2)的输出轴底部固定连接有收紧轮(3),所述收紧轮(3)的外部活动连接有收紧绳(4),所述收紧绳(4)的外部通过绳扣固定连接有导向绳(5),所述垃圾桶基座(1)的顶部设置有卷簧(6),所述卷簧(6)的内部与导向绳(5)活动连接,所述收紧绳(4)的两端均固定在收紧轮(3)上,所述垃圾桶基座(1)的顶部固定连接有限位条(7),所述限位条(7)的内部开设有两个通孔,且限位条(7)的内部通过两个通孔与收紧绳(4)滑动连接。
2.根据权利要求1所述的一种智能垃圾桶的柔性打包机构,其特征在于:所述卷簧(6)的数量为四个且分别分布在垃圾桶基座(1)的桶口四角,所述导向绳(5)的数量为四个,四个所述导向绳(5)远离收紧绳(4)的一端固定在卷簧(6)内。
3.根据权利要求1所述的一种智能垃圾桶的柔性打包机构,其特征在于:所述垃圾桶基座(1)的顶部设置有第二驱动电机(8),所述第二驱动电机(8)的输出轴左侧固定连接有第一斜齿轮(9),所述第一斜齿轮(9)的外部啮合有第二斜齿轮(10),所述第二斜齿轮(10)的顶部固定连接有熔接臂(11),所述熔接臂(11)的左侧啮合有压紧臂(12),所述第二斜齿轮(10)的底部和压紧臂(12)的底部均与垃圾桶基座(1)通过转杆转动连接。
4.根据权利要求3所述的一种智能垃圾桶的柔性打包机构,其特征在于:所述熔接臂(11)的前侧设置有发热丝(13),所述压紧臂(12)的前侧设置有隔热条(14)。
技术总结
本技术涉及一种智能垃圾桶的柔性打包机构,包括垃圾桶基座,所述垃圾桶基座的顶部后侧设置有第一驱动电机,所述第一驱动电机的输出轴底部固定连接有收紧轮,所述收紧轮的外部活动连接有收紧绳,所述收紧绳的外部通过绳扣固定连接有导向绳,所述垃圾桶基座的顶部设置有卷簧,所述卷簧的内部与导向绳活动连接。该智能垃圾桶的柔性打包机构,第一驱动电机带动收紧绳收卷,收紧绳和导向绳的四个连接处相互接近而汇聚于限位条处,将垃圾袋收束,第二驱动电机带动熔接臂转动,熔接臂带动压紧臂转动,使得熔接臂上的发热丝与压紧臂上的隔热条夹住垃圾袋,发热丝通电加热对垃圾袋进行熔接并熔断,完成垃圾袋的打包。
技术研发人员:王达尉,刘怀景,梁俊峰,季佳铭,侯帅,梁俊岭
受保护的技术使用者:上海原观科技有限公司
技术研发日:20230427
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!