一种防倾翻仓储机器人的制作方法
本技术涉及机器人,具体为一种防倾翻仓储机器人。
背景技术:
1、目前,机器人技术在物流中的应用主要集中在包装码垛、装卸搬运两个作业环节,随着新型机器人技术的不断涌现,其他物流领域也会出现越来越多的智能机器人应用案例,仓储物流机器人将对物流运作模式和整个物流体系变革产生深远影响。而常用的仓储机器人未满足能将货物放置于高层,结构设计较高,这使得机器人在搬运、抬升大重量的货物时,设备整体重心不稳定,从而有较大概率造成货物倾倒损坏,或者货物因自身重心高导致不稳定,从机器人上落下。
2、如现有技术中,公开号cn218200286u的中国
技术实现要素:
,公开了一种仓储机器人,该实用新型通过将支撑杆的杆头向上转动,使得杆头高于货物放置区并保持,能够对货物进行拦阻,阻止货物跌落下机器人本体或倾倒于机器人本体;通过将支撑杆的杆头向下转动,使得杆头低于底座,略高于地面并保持,能够支撑在地面上,以阻止机器人本体进一步倾倒;此外,该实用新型还通过设置t型杆头,能够实现支撑杆同时对货物进行拦阻和对机器人本体防倾倒。
3、通过上述技术可知晓,现有仓储机器人在搬运大重量货物时,会出现设备整体重心不稳定,造成货物倾倒损坏的情况的问题,因此我们需要提出一种防倾翻仓储机器人。
技术实现思路
1、本实用新型的目的在于提供一种防倾翻仓储机器人,可以在搬运提升过程中,提高底座的稳定性,增大底座对设备整体重心的承载性能,从而保证中心的稳定,防止货物发生倾倒损坏的情况,以解决上述背景技术中提出的问题。
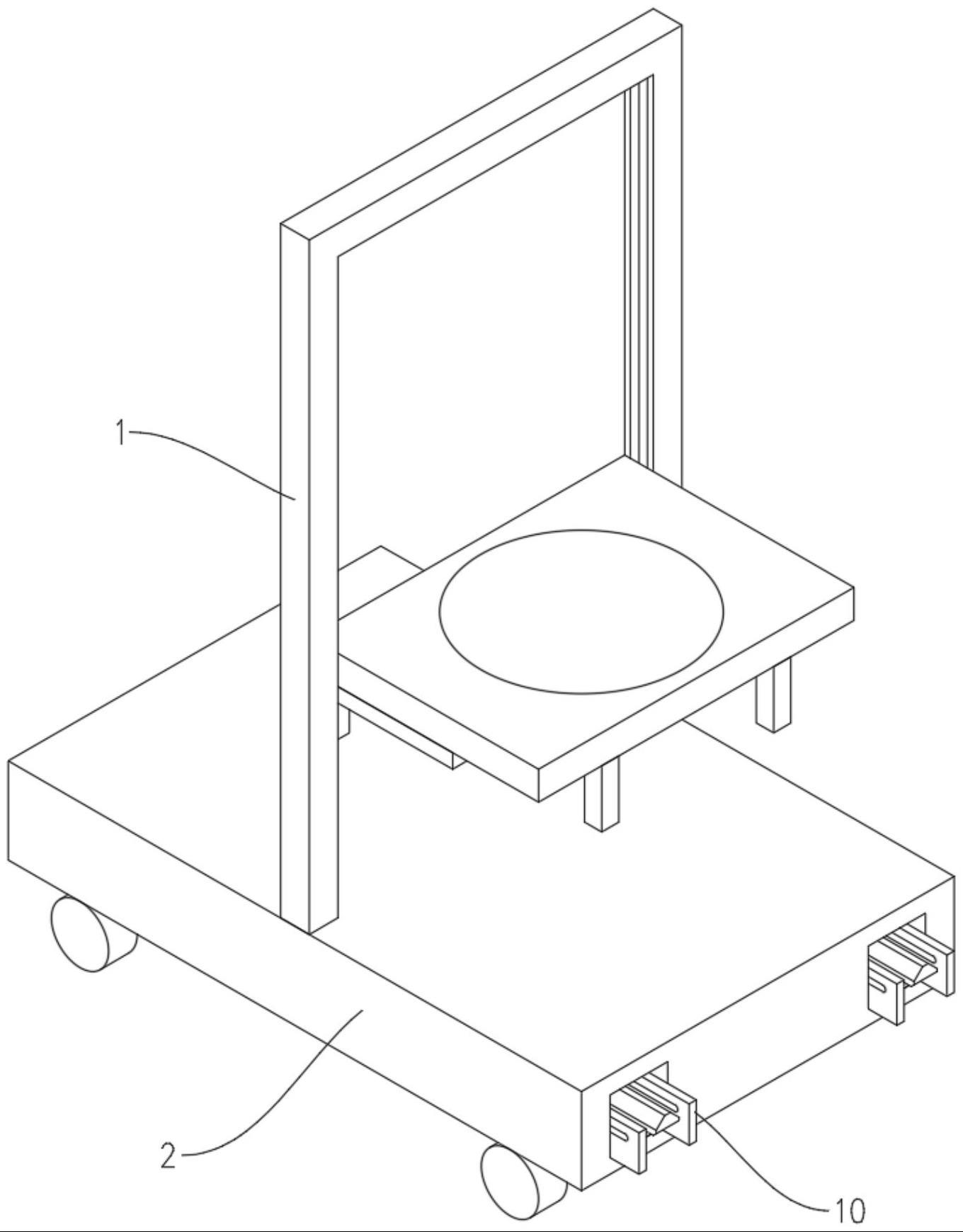
2、为实现上述目的,本实用新型提供:一种防倾翻仓储机器人,包括机器人主体和安装机器人主体的底座,所述机器人主体的端部向内开设有装配槽,所述装配槽的内部设置有推动组件,所述推动组件包括有移动框,所述移动框的一侧通过导向块滑动连接装配槽的内壁,所述移动框顶部设置有防倾支撑组件,所述防倾支撑组件包括安装轴,所述安装轴的表面通过装配筒连接支撑架,所述支撑架的一端通过连接轴活动连接有第二推杆。
3、优选的,所述推动组件还包括:连接在所述移动框表面一侧的连接杆,及连接所述连接杆的第一推杆;其中,所述连接杆的表面中心位置连接有连接块,所述第一推杆的伸出端通过连接块连接连接杆。
4、优选的,所述装配槽的一侧位于底座的内部开设有安装槽,所述第一推杆嵌装在安装槽的内部,所述安装槽的两侧通过连接槽与装配槽连通,所述连接杆的外表面滑动连接连接槽的内壁。
5、优选的,所述装配槽的内壁开设有导向槽,所述导向块安装在移动框的一侧,所述导向块的外表面滑动连接导向槽的内壁。
6、优选的,所述防倾支撑组件还包括:连接在安装轴两端的限位杆;套设在安装轴表面的装配筒,及连接在装配筒表面的连接板;其中,所述移动框的内壁两侧开设有限位槽,所述限位杆的表面滑动连接在限位槽的内壁,所述装配筒连接在支撑架的端部。
7、优选的,所述连接轴安装在连接板的内表面,所述第二推杆的伸出端连接有连接套筒,所述连接轴的外表面与连接套筒的内表面转动连接。
8、优选的,所述第二推杆的末端连接有定位套筒,所述移动框的顶部一端设置有定位杆,所述定位套筒套设在定位杆的表面。
9、与现有技术相比,本实用新型的有益效果是:
10、本实用新型通过底座、推动组件和防倾支撑组件等结构的设置,在机器人主体进行提升搬运货物时,通过第一推杆推动连接杆,控制移动框通过侧表面的导向块在装配槽的内部进行运动,起到伸缩的作用,从而伸出底座一端;并配合定位杆上连接的第二推杆伸出,使得安装轴通过限位杆在限位槽的内部向前运动,将支撑架推出,在推到限位槽端部时,通过定位杆、安装轴和连接轴的配合,起到杠杆效应,可以将支撑架外端抵紧在地面上,增大底座对地面的接触范围,进一步提高底座的稳定,防止货物发生倾倒损坏的情况。
技术特征:
1.一种防倾翻仓储机器人,其特征在于,包括:
2.根据权利要求1所述的一种防倾翻仓储机器人,其特征在于:所述推动组件还包括:
3.根据权利要求2所述的一种防倾翻仓储机器人,其特征在于:所述装配槽(3)的一侧位于底座(2)的内部开设有安装槽(5),所述第一推杆(7)嵌装在安装槽(5)的内部,所述安装槽(5)的两侧通过连接槽(6)与装配槽(3)连通,所述连接杆(9)的外表面滑动连接连接槽(6)的内壁。
4.根据权利要求1所述的一种防倾翻仓储机器人,其特征在于:所述装配槽(3)的内壁开设有导向槽(4),所述导向块(22)安装在移动框(10)的一侧,所述导向块(22)的外表面滑动连接导向槽(4)的内壁。
5.根据权利要求1所述的一种防倾翻仓储机器人,其特征在于:所述防倾支撑组件还包括:
6.根据权利要求5所述的一种防倾翻仓储机器人,其特征在于:所述连接轴(20)安装在连接板(19)的内表面,所述第二推杆(14)的伸出端连接有连接套筒(15),所述连接轴(20)的外表面与连接套筒(15)的内表面转动连接。
7.根据权利要求6所述的一种防倾翻仓储机器人,其特征在于:所述第二推杆(14)的末端连接有定位套筒(13),所述移动框(10)的顶部一端设置有定位杆(12),所述定位套筒(13)套设在定位杆(12)的表面。
技术总结
本技术公开了一种防倾翻仓储机器人,属于机器人技术领域,包括机器人主体和安装机器人主体的底座,所述机器人主体的端部向内开设有装配槽,所述装配槽的内部设置有推动组件,所述推动组件包括有移动框,所述移动框的一侧通过导向块滑动连接装配槽的内壁,所述移动框顶部设置有防倾支撑组件,所述防倾支撑组件包括安装轴,所述安装轴的表面通过装配筒连接支撑架,所述支撑架的一端通过连接轴活动连接有第二推杆;本技术通过推动组件和防倾支撑组件等结构的配合,可以在搬运提升过程中,提高底座的稳定性,增大底座对设备整体重心的承载性能,从而保证中心的稳定,防止货物发生倾倒损坏的情况。
技术研发人员:李维范,周子勋,刘艳军,伍锡兴,蔡锦木
受保护的技术使用者:北京龙腾微时代科技信息有限公司
技术研发日:20230506
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!