一种水泥库库底的清堵机器人的制作方法
本技术属于清堵设备,涉及一种水泥库库底的清堵机器人。
背景技术:
1、人工清理是水泥库库底的通常清库方法,但安全隐患多,危险程度高,并且效率低,费时费力。无论是水泥库上部还是底部,人工清理时,作业人员一般是通过安全绳从人孔门进入库内,以吊装方式进行壁面清理,以撬打方式进行库底捣通。
2、目前也采用机械方式对水泥库底部库料通过类似挖掘机的工作方式进行挖动或推动,但是,这种方式对水泥库底部锥体内下料的堵塞难以解决,会影响整个库料的正常流动。
技术实现思路
1、本实用新型的目的是提供一种水泥库库底的清堵机器人,以能够实现高效、安全的水泥库清库,并且提高作业人员的安全保障性。
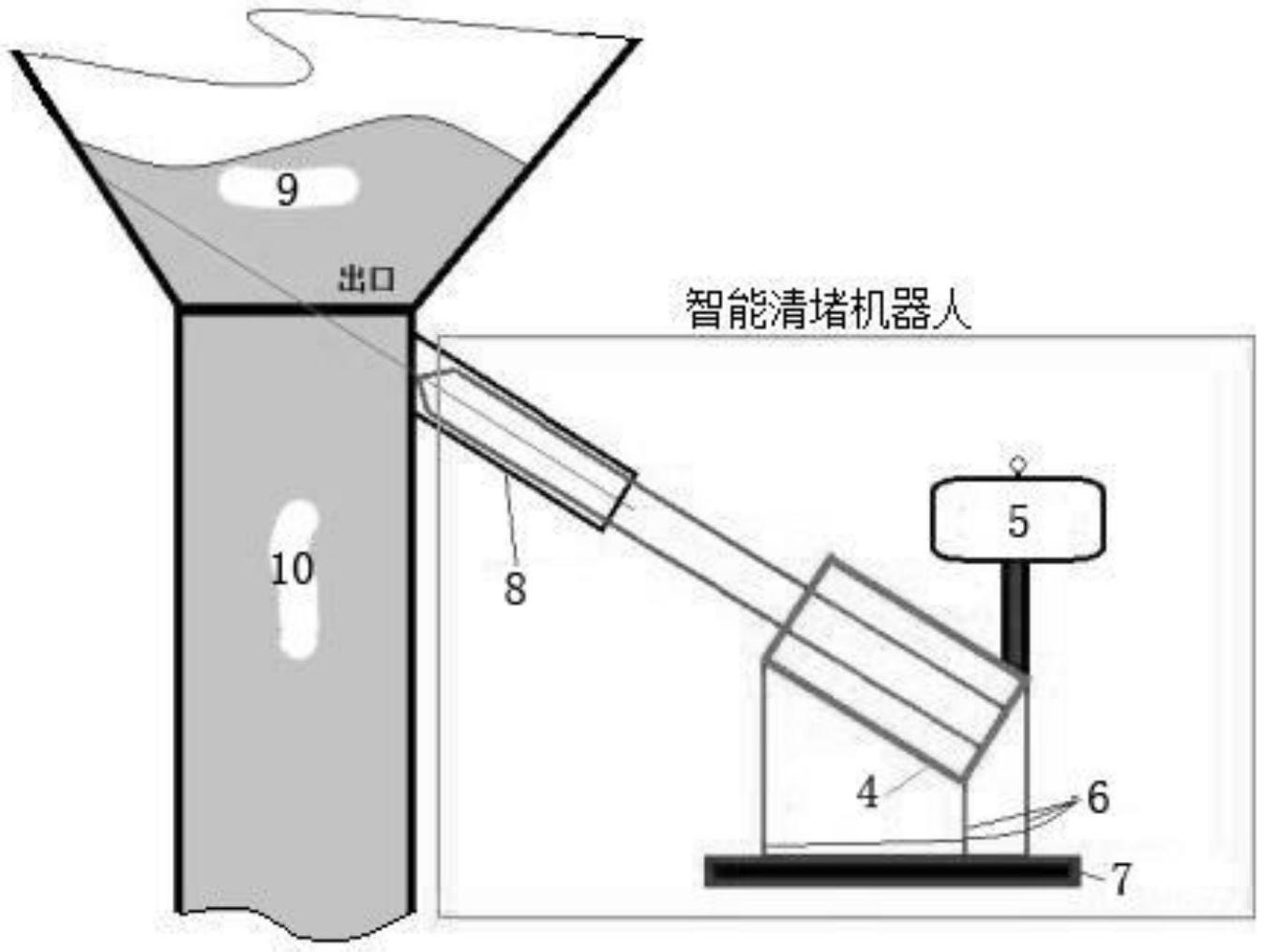
2、为实现此目的,在基础的实施方案中,本实用新型提供一种水泥库库底的清堵机器人,所述的清堵机器人包括鞭刀驱动杆、钻头、异径鞭刀、鞭刀杆驱动机,
3、所述的鞭刀驱动杆最前端连接所述的钻头,所述的钻头后设置多根直径逐渐扩大,且套在所述的鞭刀驱动杆上的异径鞭刀,所述的钻头与所述的异径鞭刀共同实现对水泥库库底的清堵;
4、所述的鞭刀杆驱动机用于驱动所述的鞭刀驱动杆进退。
5、在一种优选的实施方案中,本实用新型提供一种水泥库库底的清堵机器人,其中所述的异径鞭刀的数量为3-4根。
6、在一种优选的实施方案中,本实用新型提供一种水泥库库底的清堵机器人,其中所述的清堵机器人还包括为所述的鞭刀杆驱动机提供动力的电机。
7、在一种优选的实施方案中,本实用新型提供一种水泥库库底的清堵机器人,其中所述的电机为变频电机。
8、在一种优选的实施方案中,本实用新型提供一种水泥库库底的清堵机器人,其中所述的清堵机器人还包括支架,用于支撑所述的鞭刀杆驱动机。
9、在一种优选的实施方案中,本实用新型提供一种水泥库库底的清堵机器人,其中所述的清堵机器人还包括支架底座,用于支撑所述的支架。
10、在一种优选的实施方案中,本实用新型提供一种水泥库库底的清堵机器人,其中所述的清堵机器人还包括鞭刀套管,用于套在所述的鞭刀驱动杆、钻头、异径鞭刀的外面,对它们进行不用时的保护。
11、在一种优选的实施方案中,本实用新型提供一种水泥库库底的清堵机器人,其中所述的清堵机器人还包括控制系统,其包括运动控制系统和转速控制系统,用于控制所述的钻头与所述的异径鞭刀共同实现对水泥库库底的清堵。
12、本实用新型的有益效果在于,本实用新型的水泥库库底的清堵机器人,在原下料口处附件加装自动智能钻头,通过步进驱动实现对堆积在下料接口处的块料进行钻透打碎,从而实现料道的疏通,能够实现高效、安全的水泥库清库,并且提高作业人员的安全保障性。
13、常规水泥库底下料部分容易堵塞,一般都是人工进入水泥库底进行人工体力钻透,劳动强度大,安全隐患多。本实用新型的库底智能清堵机器人安装在原下料口的接合部,主要优势功能如下:
14、第一,在原下料设备基础上,容易改造,主要通过在一定垂直高度处,按一定角度进行打孔,打孔后封装鞭刀套管;
15、第二,在鞭刀驱动杆上安装顶部钻头、异径鞭刀,通过顶部钻头打通钻孔,然后再通过一定转速调节,实现异径鞭刀的切削,完成块状水泥的打碎;
16、第三,鞭刀驱动杆通过可以实现变频的驱动机进行转速控制,从而实现鞭刀合适力度的转速要求;
17、第四,鞭刀驱动杆前进、后退以及转速控制,统一由鞭刀杆驱动机及其控制系统来完成。
18、本实用新型的水泥库库底的清堵机器人,相对常规人工作业清理,是一种从技术原理到技术配备上新颖而高效的设备,通过智能清堵,可实现水泥库库底疏通的安全、高效,并能进一步结合生产实现工作过程的智能化,对水泥厂生产带来极大的方便与安全经济效益。
技术特征:
1.一种水泥库库底的清堵机器人,其特征在于:所述的清堵机器人包括鞭刀驱动杆、钻头、异径鞭刀、鞭刀杆驱动机,
2.根据权利要求1所述的清堵机器人,其特征在于:所述的异径鞭刀的数量为3-4根。
3.根据权利要求1所述的清堵机器人,其特征在于:所述的清堵机器人还包括为所述的鞭刀杆驱动机提供动力的电机。
4.根据权利要求3所述的清堵机器人,其特征在于:所述的电机为变频电机。
5.根据权利要求1所述的清堵机器人,其特征在于:所述的清堵机器人还包括支架,用于支撑所述的鞭刀杆驱动机。
6.根据权利要求5所述的清堵机器人,其特征在于:所述的清堵机器人还包括支架底座,用于支撑所述的支架。
7.根据权利要求1所述的清堵机器人,其特征在于:所述的清堵机器人还包括鞭刀套管,用于套在所述的鞭刀驱动杆、钻头、异径鞭刀的外面,对它们进行不用时的保护。
8.根据权利要求1所述的清堵机器人,其特征在于:所述的清堵机器人还包括控制系统,其包括运动控制系统和转速控制系统,用于控制所述的钻头与所述的异径鞭刀共同实现对水泥库库底的清堵。
技术总结
本技术属于清堵设备技术领域,涉及一种水泥库库底的清堵机器人。所述的清堵机器人包括鞭刀驱动杆、钻头、异径鞭刀、鞭刀杆驱动机,所述的鞭刀驱动杆最前端连接所述的钻头,所述的钻头后设置多根直径逐渐扩大,且套在所述的鞭刀驱动杆上的异径鞭刀,所述的钻头与所述的异径鞭刀共同实现对水泥库库底的清堵;所述的鞭刀杆驱动机用于驱动所述的鞭刀驱动杆进退。本技术的水泥库库底的清堵机器人,在原下料口处附件加装自动智能钻头,通过步进驱动实现对堆积在下料接口处的块料进行钻透打碎,从而实现料道的疏通,能够实现高效、安全的水泥库清库,并且提高作业人员的安全保障性。
技术研发人员:赵洪滨,马忠云,孙文坛,张二庆,乔智军,薛军辉,徐金山,孙峰,杨海麟
受保护的技术使用者:北京胜源科技有限公司
技术研发日:20230508
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!