用于方形电池的夹爪工装的制作方法
本技术涉及电池加工技术,属于抓取转移领域,具体涉及一种用于方形电池的夹爪工装。
背景技术:
1、方形电池采用绕卷或叠片工艺,能量密度相对较高,电池循环寿命长,因其容量和电量更大,可以提供更长的使用时间,广泛运用在新能源、电子设备等领域。
2、在方形电池分选过程中,需要对其进行转运、放置在不同的通道中;现有抓取装置主要依靠于设置在机械臂上的吸嘴,即机械臂可在一定空间内移动至指定位置,通过吸嘴与方形电池接触、并负压进行吸附,实现方形电池的移动;但是仅靠吸嘴无法保障方形电池40抓取的稳定性,尤其是当负压不稳的情况下,容易发生电池掉落的情况,造成电池的损坏、存在安全风险。
技术实现思路
1、本实用新型目的在于提供一种用于方形电池的夹爪工装,结构简单紧凑,实现对方形电池的稳定抓取、转移,避免方形电池在转移过程中出现晃动,或仅靠吸嘴吸附造成抓取不稳定、存在电池掉落的风险。
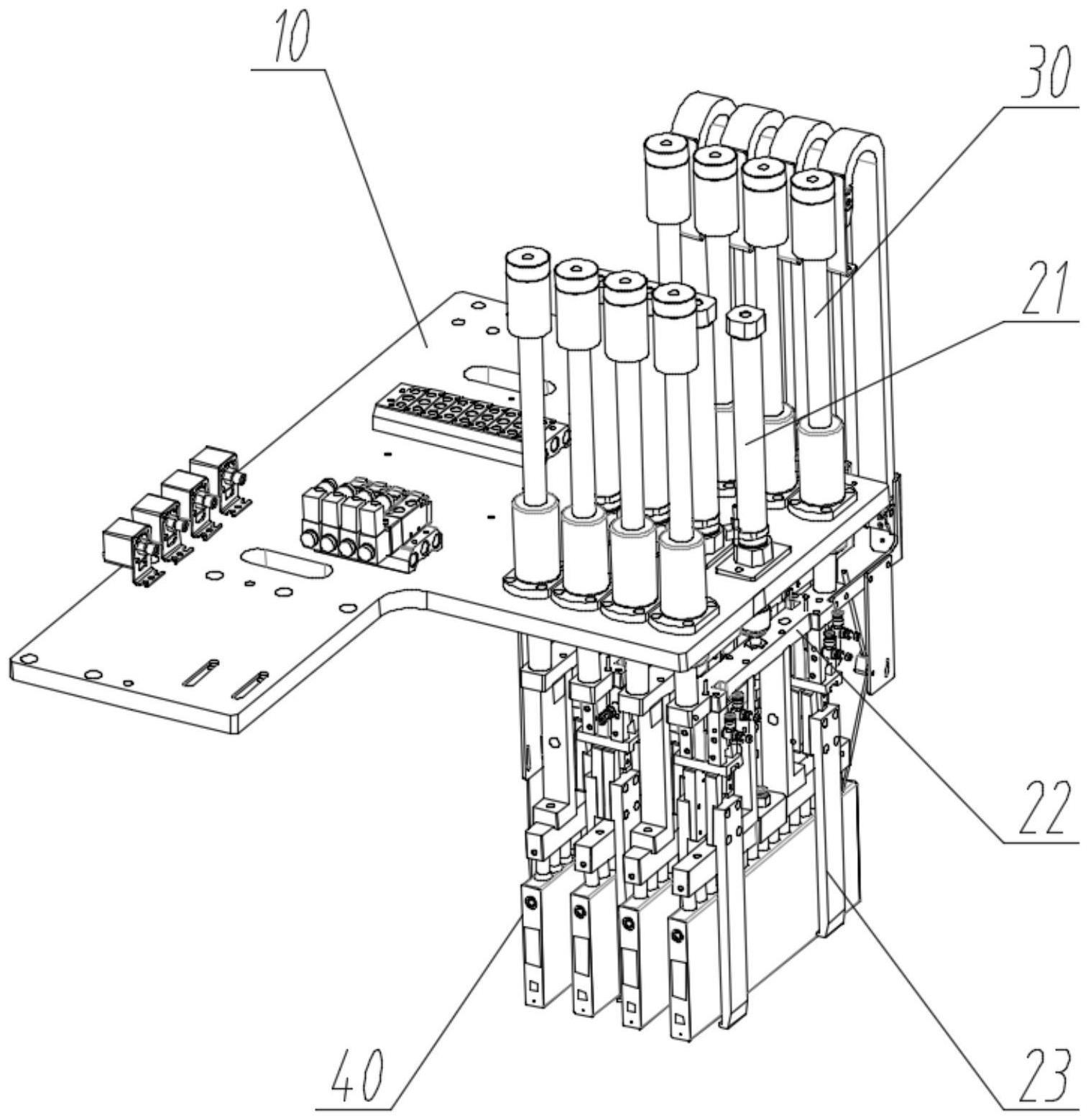
2、为实现上述目的,本用于方形电池的夹爪工装,包括:多组间隔布置在移动板下方的抓取机构;
3、每个抓取机构具有安装在驱动气缸伸缩端并上下移动的第一支板、位于第一支板下方且同移动的第二支板;
4、第一支板上设有夹紧气缸、以及一对安装在夹紧气缸伸缩端并驱动相互靠近与远离的夹爪板;每个夹爪板为l型结构、且下部折弯处面对布置;
5、第二支板上设有多个均与负压机构连接、且沿间隔布置的吸嘴。
6、在一些实施例中,相邻抓取机构中的夹爪板相互错开布置;
7、第二支板位于一对夹爪板之间。
8、在一些实施例中,还包括:具有对方形电池位置监测识别的感应组件;
9、感应组件活动调整安装在位于移动板上的固定板上、并与控制器连接,控制器控制移动板的移动、以及驱动气缸、夹紧气缸的动作。
10、进一步的,所述感应组件为光电位置感应器,光电位置感应器的检测端朝向夹爪板处;
11、固定板上设有弧形槽,光电位置感应器一端转动安装在固定板上、另一端通过滑动位于弧形槽内的螺栓绕设角度布置。
12、在一些实施例中,所述第一支板上设有竖直布置的导向杆;
13、导向杆的中部滑动穿过移动板、上端设有弹性结构的缓冲套筒。
14、进一步的,所述缓冲套筒滑动套装在导向杆上、径向布置有定位孔;
15、锁紧螺杆与定位孔螺纹连接、并顶压在导向杆上。
16、在一些实施例中,所述第二支板上端中部设有通过气管与负压机构连接的盲孔、长度方向上设有与盲孔连通的贯穿孔;
17、贯穿孔两端封闭、且与多个吸嘴连通。
18、在一些实施例中,所述负压机构为真空源,气管上设有对吸嘴供气压力监控的电子气压表、以及用于开闭气管的电磁阀;
19、控制器与电池阀连接、用于控制其开闭。
20、在一些实施例中,所述第二支板与第一支板之间设有连接杆;
21、连接杆下端固定在第二支板上、上部滑动穿过第一支板并螺纹安装有一对螺母;
22、一对螺母位于第一支板的上下两侧。
23、与现有技术相比,本用于方形电池的夹爪工装通过驱动气缸带动第一支板、第二支板上下移动,第一支板上的夹爪板在夹紧气缸作用下能够相互靠近与远离,使其对方形电池的周侧夹松、底端支撑,第二支板上的吸嘴与方形电池上端接触并负压吸附,因此实现对方形电池的稳定抓取、转移,避免方形电池在转移过程中出现晃动,或仅靠吸嘴吸附造成抓取不稳定、存在电池掉落的风险;
24、在一些实施例中,第一支板上的导向杆中部滑动穿过移动板、上端设有弹性结构的缓冲套筒,当吸嘴将弹性挤压作用在方形电池上时,缓冲套筒与移动板上端面接触能够有效进行缓冲,避免吸嘴对方形电池的瞬时冲击过大,起到对方形电池保护的作用;
25、在一些实施例中,真空源通过电子气压表对吸嘴供气进行压力监控,电磁阀对真空的启用/关闭进行切换,实现吸取和放置的来回切换,每组抓取机构配备一个电子压力表,设备气够源压力变化超出设定值时能迅速进行报警,避免发生真空不足造成抓取产品不稳定;
26、在一些实施例中,通过转动螺母对连接杆进行滑动与锁紧,实现第二支板到第一支板之间的距离调整,使得面对不同高度的方形电池时,能够保障吸嘴作用在方形电池上端面的同时,一对夹爪板相互靠近时能够对方形电池下端进行托起,保证方形电池抓取移动过程中,不会因为设备突然气源故障造成电池坠落,适用于不同尺寸的方形电池。
技术特征:
1.用于方形电池的夹爪工装,其特征在于,包括:多组间隔布置在移动板(10)下方的抓取机构;
2.根据权利要求1所述的用于方形电池的夹爪工装,其特征在于,相邻抓取机构中的夹爪板(23)相互错开布置;
3.根据权利要求1所述的用于方形电池的夹爪工装,其特征在于,还包括:具有对方形电池(40)位置监测识别的感应组件(50);
4.根据权利要求3所述的用于方形电池的夹爪工装,其特征在于,所述感应组件(50)为光电位置感应器(52),光电位置感应器(52)的检测端朝向夹爪板(23)处;
5.根据权利要求1至4任意一项所述的用于方形电池的夹爪工装,其特征在于,所述第一支板(22)上设有竖直布置的导向杆(30);
6.根据权利要求5所述的用于方形电池的夹爪工装,其特征在于,所述缓冲套筒(31)滑动套装在导向杆(30)上、径向布置有定位孔;
7.根据权利要求1至4任意一项所述的用于方形电池的夹爪工装,其特征在于,所述第二支板(25)上端中部设有通过气管与负压机构连接的盲孔(27)、长度方向上设有与盲孔(27)连通的贯穿孔(28);
8.根据权利要求7所述的用于方形电池的夹爪工装,其特征在于,所述负压机构为真空源,气管上设有对吸嘴(26)供气压力监控的电子气压表、以及用于开闭气管的电磁阀;
9.根据权利要求8所述的用于方形电池的夹爪工装,其特征在于,所述第二支板(25)与第一支板(22)之间设有连接杆(29);
技术总结
本技术公开了一种用于方形电池的夹爪工装,包括:多组间隔布置在移动板下方的抓取机构;每个抓取机构具有安装在驱动气缸伸缩端并上下移动的第一支板、位于第一支板下方且同移动的第二支板;第一支板上设有夹紧气缸、以及一对安装在夹紧气缸伸缩端并驱动相互靠近与远离的夹爪板;每个夹爪板为L型结构、且下部折弯处面对布置;第二支板上设有多个均与负压机构连接、且沿间隔布置的吸嘴。本用于方形电池的夹爪工装,结构简单紧凑,实现对方形电池的稳定抓取、转移,避免方形电池在转移过程中出现晃动,或仅靠吸嘴吸附造成抓取不稳定、存在电池掉落的风险。
技术研发人员:郑棉胜
受保护的技术使用者:南京贝爱特自动化科技有限公司
技术研发日:20230509
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!