一种防打滑搬运机器人的制作方法
本技术涉及机器人,具体为一种防打滑搬运机器人。
背景技术:
1、搬运机器人【transferrobot】是可以进行自动化搬运作业的工业机器人。最早的搬运机器人[1]出现在1960年的美国,versatran和unimate两种机器人首次用于搬运作业。搬运作业是指用一种设备握持工件,是指从一个加工位置移到另一个加工位置。搬运机器人可安装不同的末端执行器以完成各种不同形状和状态的工件搬运工作,大大减轻了人类繁重的体力劳动。世界上使用的搬运机器人逾10万台,被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛搬运、集装箱等的自动搬运。部分发达国家已制定出人工搬运的最大限度,超过限度的必须由搬运机器人来完成。
2、如申请号为cn202122999596.9的公开文件,公开了搬运机器人,包括移动底盘和设置在移动底盘上的搬运装置;移动底盘包括底盘基体和至少一个滚轮组件,滚轮组件设置在底盘基体的底面,且滚轮组件可延伸至底盘基体的边缘外侧或缩回至底盘基体的下方。从而使滚轮组件可以根据搬运机器人的重心变化进行伸缩,以调整对搬运机器人的支撑力,进而有利于保证搬运机器人的稳定性,但是该是将箱子顶在上侧,带着箱子移动,这种机器人不能搬起地上的箱子,需要人力或者其他搬运机器进行辅助,较费时费力。
3、于是,有鉴于此,针对现有的结构不足予以研究改良,提出一种防打滑搬运机器人。
技术实现思路
1、本实用新型的目的在于提供一种防打滑搬运机器人,以解决上述背景技术中提出的问题。
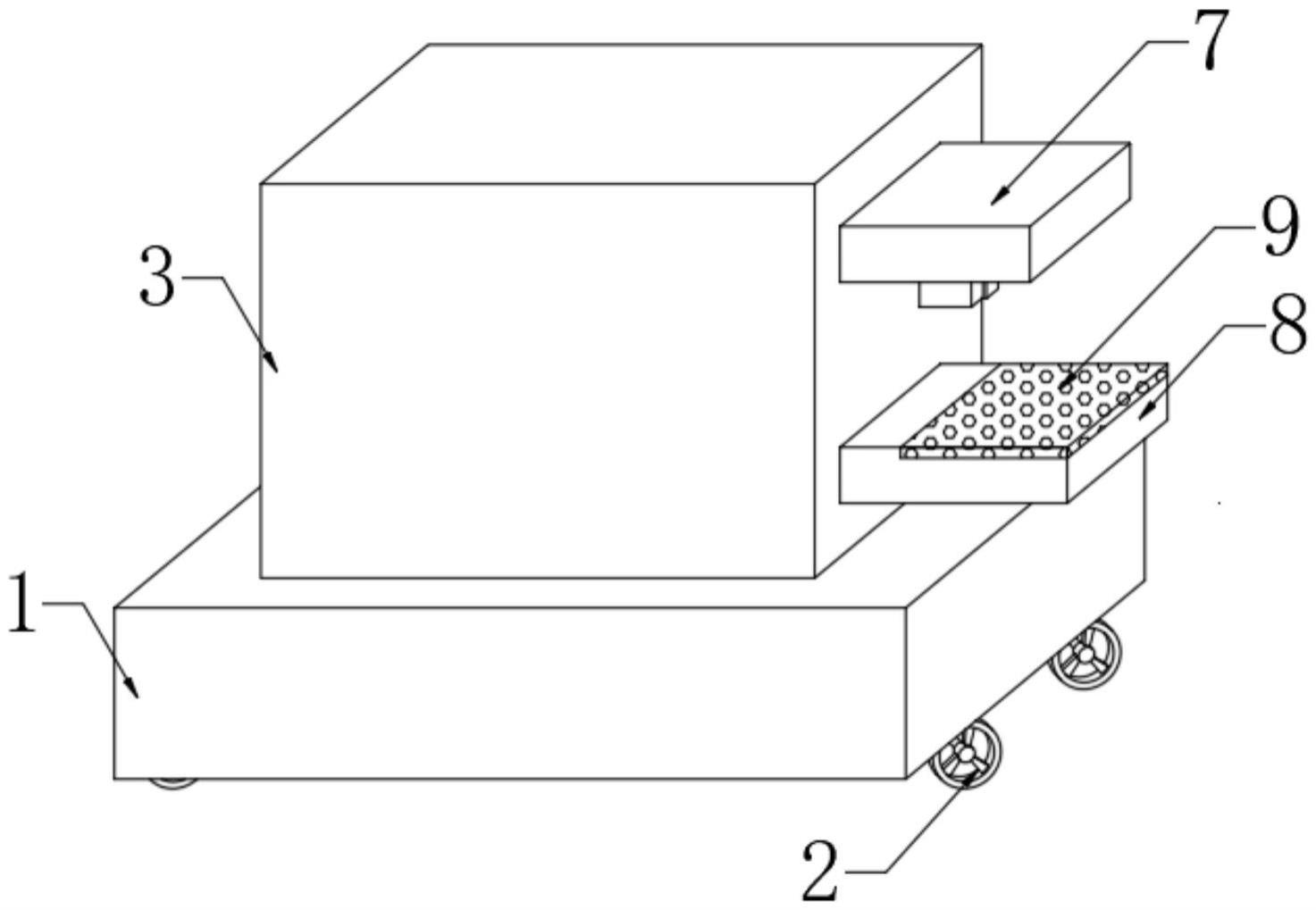
2、为实现上述目的,本实用新型提供如下技术方案:一种防打滑搬运机器人,包括底座和主体,所述底座的下方设置有滚轮,所述主体设置于底座的上方,所述主体的内部开设有通腔,所述通腔的内部设置有转板,所述转板的右侧转动连接有电动伸缩杆一,所述转板一侧上方转动连接有连接板,所述转板一侧下方连接有挡板,所述挡板的上方一侧外表面设置有防护垫,所述连接板的下方一侧设置有电动伸缩杆二,所述电动伸缩杆二的下方固定连接有支撑板一,所述支撑板一下方设置有吸盘。
3、优选的,所述转板通过轴承与通腔内壁转动连接,且电动伸缩杆一沿通腔一侧内壁中轴线对称设置有两个。
4、优选的,所述支撑板一的一侧设有橡胶垫,且橡胶垫的一侧固定连接有夹持板。
5、优选的,所述夹持板的一侧固定连接有两个电动伸缩柱,所述电动伸缩柱的一侧固定连接有支撑板二。
6、优选的,所述支撑板二沿电动伸缩杆一中心对称设置有两个,且支撑板二一侧与连接板固定连接。
7、优选的,所述滚轮的一侧设置有液压缸,且液压缸的上方设置有转轮。
8、优选的,所述转轮在底座内部转动连接,且转轮沿底座中轴线对称设置有两个。
9、优选的,所述液压缸的下方固定连接有支架,且支架的下方固定连接有防滑垫。
10、与现有技术相比,本实用新型的有益效果是:
11、1.本实用新型通过通腔、转板、电动伸缩杆一、连接板、挡板、电动伸缩杆二、支撑板一和吸盘的设置,当准备进行吸附箱子时,通过电动伸缩杆一进行收缩,使得通腔内部的转板进行转动,使得连接板进行伸长,挡板一段进行收缩到主体内部,再通过电动伸缩杆二伸长,来使支撑板一进行移动,带动吸盘进行下移,启动吸盘对箱子进行吸附,便于进行运输使用;
12、2.本实用新型通过橡胶垫、夹持板、电动伸缩柱和支撑板二的设置,当吸盘吸住箱子上升到固定位置时,通过启动两侧的电动伸缩柱,使得两侧的夹持板向中间靠拢,来对箱子进行夹持,夹持板上的橡胶垫防止夹坏箱子,有效防止箱子脱落,进行运输;
13、3.本实用新型通过液压缸、转轮、支架和防滑垫的设置,当需要转弯时,通过启动液压缸伸长,使得液压缸下方的支架向下移动,让支架上的防滑垫接触地面,抬起底座一侧的滚轮,在启动滚轮,从而实现进行原地转动,便于实现转弯的效果。
技术特征:
1.一种防打滑搬运机器人,包括底座(1)和主体(3),其特征在于,所述底座(1)的下方设置有滚轮(2),所述主体(3)设置于底座(1)的上方,所述主体(3)的内部开设有通腔(4),所述通腔(4)的内部设置有转板(5),所述转板(5)的右侧转动连接有电动伸缩杆一(6),所述转板(5)一侧上方转动连接有连接板(7),所述转板(5)一侧下方连接有挡板(8),所述挡板(8)的上方一侧外表面设置有防护垫(9),所述连接板(7)的下方一侧设置有电动伸缩杆二(10),所述电动伸缩杆二(10)的下方固定连接有支撑板一(11),所述支撑板一(11)下方设置有吸盘(12)。
2.根据权利要求1所述的一种防打滑搬运机器人,其特征在于,所述转板(5)通过轴承与通腔(4)内壁转动连接,且电动伸缩杆一(6)沿通腔(4)一侧内壁中轴线对称设置有两个。
3.根据权利要求1所述的一种防打滑搬运机器人,其特征在于,所述支撑板一(11)的一侧设有橡胶垫(13),且橡胶垫(13)的一侧固定连接有夹持板(14)。
4.根据权利要求3所述的一种防打滑搬运机器人,其特征在于,所述夹持板(14)的一侧固定连接有两个电动伸缩柱(15),所述电动伸缩柱(15)的一侧固定连接有支撑板二(16)。
5.根据权利要求4所述的一种防打滑搬运机器人,其特征在于,所述支撑板二(16)沿电动伸缩杆一(6)中心对称设置有两个,且支撑板二(16)一侧与连接板(7)固定连接。
6.根据权利要求1所述的一种防打滑搬运机器人,其特征在于,所述滚轮(2)的一侧设置有液压缸(17),且液压缸(17)的上方设置有转轮(18)。
7.根据权利要求6所述的一种防打滑搬运机器人,其特征在于,所述转轮(18)在底座(1)内部转动连接,且转轮(18)沿底座(1)中轴线对称设置有两个。
8.根据权利要求6所述的一种防打滑搬运机器人,其特征在于,所述液压缸(17)的下方固定连接有支架(19),且支架(19)的下方固定连接有防滑垫(20)。
技术总结
本技术公开了一种防打滑搬运机器人,涉及机器人技术领域,包括底座和主体,所述底座的下方设置有滚轮,所述主体设置于底座的上方,所述主体的内部开设有通腔,所述通腔的内部设置有转板,所述转板的右侧转动连接有电动伸缩杆一,所述转板一侧上方转动连接有连接板,所述转板一侧下方连接有挡板,所述挡板的上方一侧外表面设置有防护垫。该防打滑搬运机器人,与现有的普通搬运机器人相比,当准备进行吸附箱子时,通过电动伸缩杆一进行收缩,使得通腔内部的转板进行转动,使得连接板进行伸长,挡板一段进行收缩到主体内部,再通过电动伸缩杆二伸长,来使支撑板一进行移动,带动吸盘进行下移,启动吸盘对箱子进行吸附,便于进行运输使用。
技术研发人员:肖华,张三保,郝祥源
受保护的技术使用者:苏州永信自动化设备有限公司
技术研发日:20230516
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!