一种机器人吸持夹具的制作方法
本技术涉及机器人,具体涉及一种机器人吸持夹具。
背景技术:
1、随着机器人技术的飞速发展,工业机器人已广泛应用于各个领域。目前,进行贴标签操作的生产逐渐由传统的人工操作向全自动化的机器人操作转变。机器人在提取移动标签时,通常使用吸持夹具吸标签实现移动。但是,机器人运动至贴标准备位,驱动吸持夹具向下对产品贴标签时,机器人下压过程中易出现反馈不及时导致压力过大使标签破损的情况。因而有必要予以改进。
技术实现思路
1、本实用新型的目的在于提供一种机器人吸持夹具,该结构使得机器人下压过程中能够及时反馈,避免压力过大压破标签。
2、本实用新型的目的可以通过以下技术方案实现:
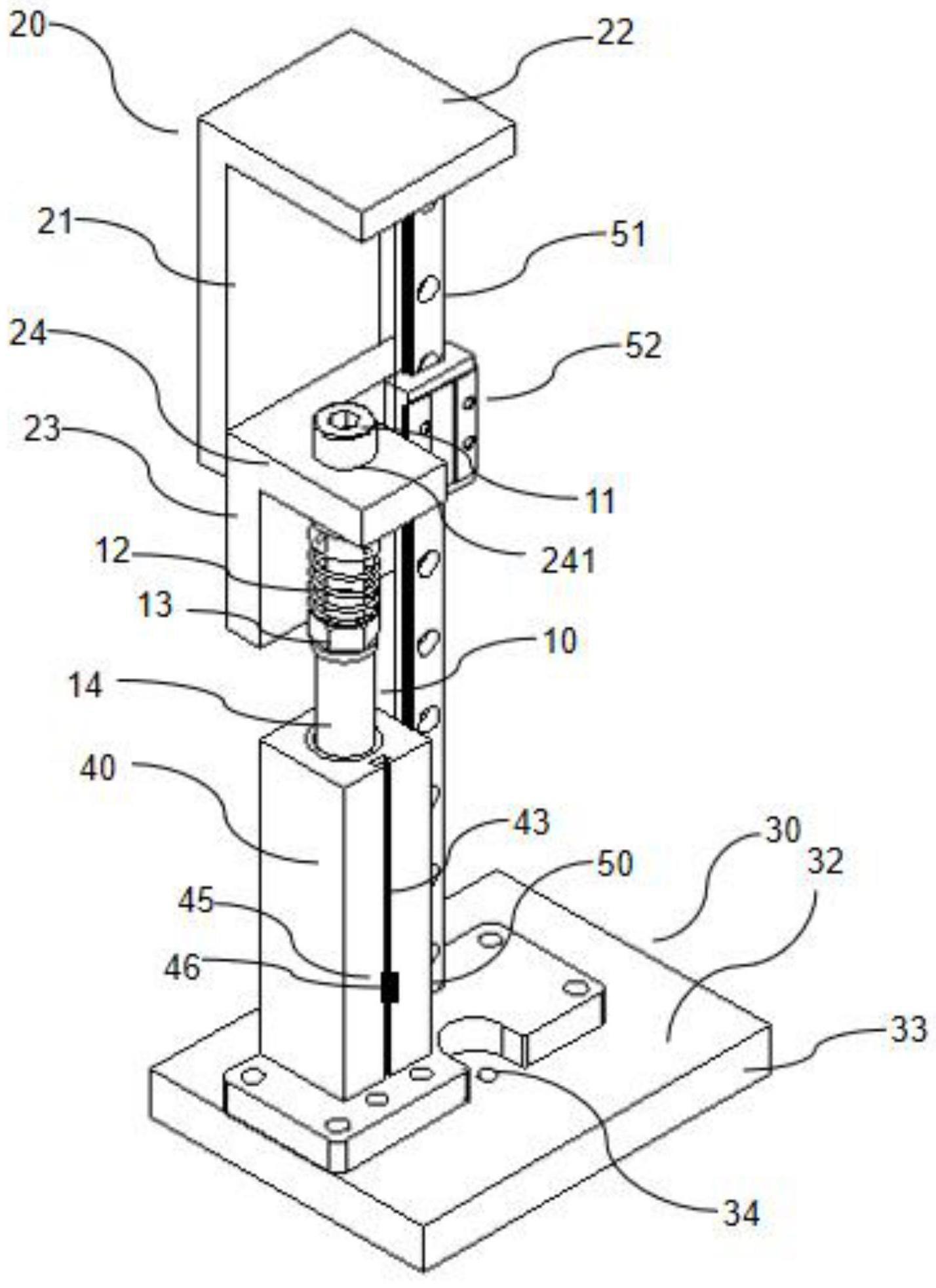
3、一种机器人吸持夹具,包括竖立的压杆、分别连接于压杆两端的安装座和腔体、以及位于腔体下方的贴标板,所述腔体上还设有到位信号触发的触发机构。
4、作为本实用新型进一步的方案:所述安装座包括竖直的第一底板、设于第一底板上边缘的第一水平板、设于第一底板内表面的第二竖直板以及设于第二竖板上边缘的第二水平板。
5、作为本实用新型进一步的方案:所述压杆包括第一下压杆、设于所述第一下压杆上从上到下依次套设的第一弹簧、限位螺丝以及第二下压杆,所述第二水平板上设有通孔,所述第一下压杆一端固定在通孔内,所述限位螺丝固定在所述第二下压杆上端,所述第一弹簧的一端与所述限位螺丝固定连接,另一端固定在通孔内。
6、作为本实用新型进一步的方案:所述腔体内部具有缓冲腔,所述第二下压杆的下端插装在所述缓冲腔内。
7、作为本实用新型进一步的方案:所述腔体上设有竖槽,所述触发机构包括设于缓冲腔内的第二弹簧和设于竖槽内的限位传感器。
8、作为本实用新型进一步的方案:所述第二弹簧的一端顶在所述缓冲腔的底面,另一端顶在第二下压杆的下端面上。
9、作为本实用新型进一步的方案:所述腔体外部设置有的固定座,所示固定座上竖直安装有导轨,所述第二竖板内表面上对应所述导轨位置设有滑块,所述滑块套在所述导轨上,使得安装座能沿导轨上下升降。
10、作为本实用新型进一步的方案:所述贴标板由底面、顶面以及4个侧面构成,所述贴标板内部具有矩形腔,所述顶面上设有与矩形腔相通的进气孔,底面上设有与矩形腔相通的若干阵列排布的出气孔。
11、本实用新型的有益效果:使用该结构当机器人运动至贴标准备位,向下驱动吸持夹具向下直线移动,直至贴标板压到产品,第二弹簧被压缩,会触发限位传感器,信号传给机器人,机器人收到信号后会停止运动。其中,第一弹簧能够起到了缓冲作用,防止机器人因为动作延时导致机械结构碰撞,可以预留出足够的反应时间。贴标板执行吹气动作可使标签纸受力黏贴在各种产品的平面上,能够适用于不同的产品。而且标签纸大小变化时只需更换贴标板,只要贴标板出气孔在标签纸范围内可全覆盖即可正常使用。该结构简单,使用方便。
技术特征:
1.一种机器人吸持夹具,其特征在于:包括竖立的压杆、分别连接于压杆两端的安装座和腔体、以及位于腔体下方的贴标板,所述腔体上还设有到位信号触发的触发机构。
2.根据权利要求1所述的机器人吸持夹具,其特征在于:所述安装座包括竖直的第一底板、设于第一底板上边缘的第一水平板、设于第一底板内表面的第二竖直板以及设于第二竖板上边缘的第二水平板。
3.根据权利要求2所述的机器人吸持夹具,其特征在于:所述压杆包括第一下压杆、设于所述第一下压杆上从上到下依次套设的第一弹簧、限位螺丝以及第二下压杆,所述第二水平板上设有通孔,所述第一下压杆一端固定在通孔内,所述限位螺丝固定在所述第二下压杆上端,所述第一弹簧的一端与所述限位螺丝固定连接,另一端固定在通孔内。
4.根据权利要求3所述的机器人吸持夹具,其特征在于:所述腔体内部具有缓冲腔,所述第二下压杆的下端插装在所述缓冲腔内。
5.根据权利要求4所述的机器人吸持夹具,其特征在于:所述腔体上设有竖槽,所述触发机构包括设于缓冲腔内的第二弹簧和设于竖槽内的限位传感器。
6.根据权利要求5所述的机器人吸持夹具,其特征在于:所述第二弹簧的一端顶在所述缓冲腔的底面,另一端顶在第二下压杆的下端面上。
7.根据权利要求2所述的机器人吸持夹具,其特征在于:所述腔体外部设置有的固定座,所示固定座上竖直安装有导轨,所述第二竖板内表面上对应所述导轨位置设有滑块,所述滑块套在所述导轨上,使得安装座能沿导轨上下升降。
8.根据权利要求1所述的机器人吸持夹具,其特征在于:所述贴标板由底面、顶面以及4个侧面构成,所述贴标板内部具有矩形腔,所述顶面上设有与矩形腔相通的进气孔,底面上设有与矩形腔相通的若干阵列排布的出气孔。
技术总结
本技术公开了一种机器人吸持夹具,包括竖立的压杆、分别连接于压杆两端的安装座和腔体、以及位于腔体下方的贴标板,所述腔体上设有到位信号触发的触发机构。触发机构包括第二弹簧和限位传感器,使用时,机器人运动至贴标准备位,驱动吸持夹具向下直线移动,直至贴标板压到产品,第二弹簧被压缩,会触发限位传感器,信号传给机器人,机器人收到信号后会停止运动。第一弹簧能够起到了缓冲作用,防止机器人因为动作延时导致机械结构碰撞,可以预留出足够的反应时间。贴标板执行吹气动作可使标签纸受力黏贴在各种产品的平面上,能够适用于不同的产品。标签纸大小变化时只需更换贴标板,只要贴标板出气孔在标签纸范围内可全覆盖即可正常使用。
技术研发人员:朱东亚
受保护的技术使用者:上海紫丹食品包装印刷有限公司
技术研发日:20230530
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!