一种拆垛机返包装置的制作方法
本技术涉及机械设备的,具体涉及一种拆垛机返包装置。
背景技术:
1、拆垛机是原料生产线上的关键设备,其作用是对码成垛的物料袋进行自动化拆垛操作,从而可以节省人力,拆垛机在工作时,拆垛机抓取物料袋后转移至上料装置处,并经割包处理后,物料从物料袋的底部倒入上料装置中,当物料袋中的物料完全倒出后,物料袋的尺寸形状发生变化,此刻拆垛机的抓取装置难以对空的物料袋进行牢固抓取,可能会造成空的物料袋遗留在上料装置上,从而对上料装置造成影响,因此需要对上述问题进行解决。
技术实现思路
1、本实用新型的目的在于提供一种拆垛机返包装置,以克服现有技术中的上述缺陷。
2、一种拆垛机返包装置,包括工业机器人,工业机器人的执行器末端连接有支撑板,支撑板其中一个角及其相对的角处设有支架,支撑板在支架的同侧设有支板,支架与支板之间转动连接有转轴,支架上通过销轴铰接有气缸的缸体,气缸的活塞杆端部设有安装座,安装座与转轴上的驱动爪板通过销轴铰接,转轴上还均布有若干副爪板,支撑板上还设有用于对上料后的包装袋进行吸附的返包组件。
3、优选的,所述返包组件包括安装架、吸盘主体及弹簧,支撑板的两侧对称设有安装架,吸盘主体通过吸盘导杆滑动连接于安装架上,弹簧套设于吸盘导杆上并位于安装架底部与吸盘主体之间,吸盘导杆外侧设有挡盘并位于安装架的上方,两个吸盘导杆之间通过连接管连接,连接管通过抽气管与真空发生器连接。
4、优选的,所述安装架为“l”字型结构且其上侧通过螺钉与安装板连接。
5、优选的,所述连接管位于安装架上的通孔中。
6、优选的,所述支撑板通过法兰盘与工业机器人的执行器末端连接。
7、本实用新型具有如下优点:
8、本实用新型在使用时,通过气缸、驱动爪板及副爪板对物料袋进行抓取,在抓取时返包组件的吸盘主体会自适应调整移动的位置并在弹簧的作用下与物料袋的上表面进行紧密接触,当物料袋的底部割包操作完成后,物料袋中的原料从物料袋的底部倒入上料装置中,当物料袋中的原料全部倒出后,真空吸盘继续对空的物料袋进行吸附,工业机器人将空的物料袋转移至空的物料袋收集处,从而对空的物料袋进行返包操作。
技术特征:
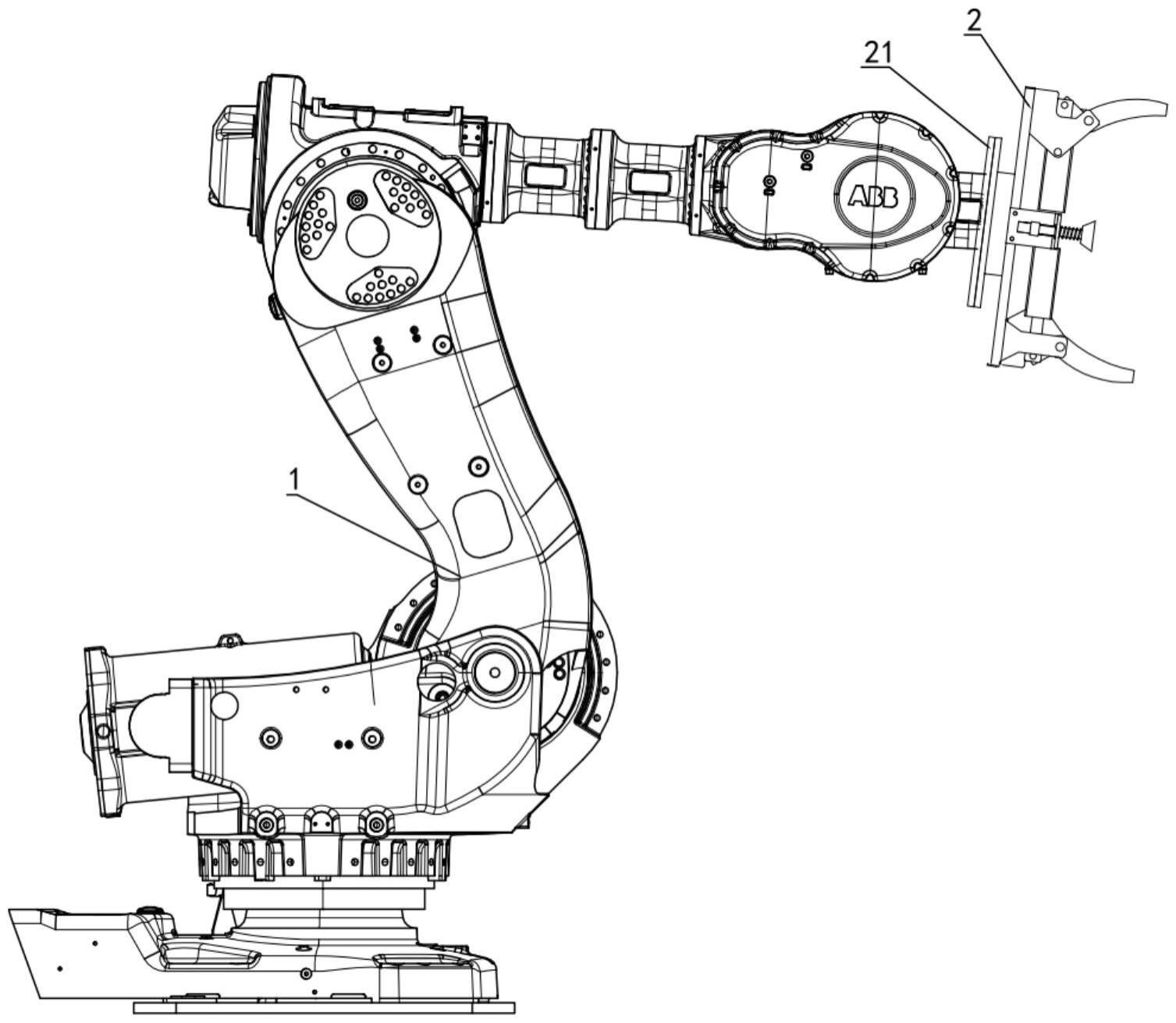
1.一种拆垛机返包装置,包括工业机器人(1),其特征在于:工业机器人(1)的执行器末端连接有支撑板(2),支撑板(2)其中一个角及其相对的角处设有支架(3),支撑板(2)在支架(3)的同侧设有支板(4),支架(3)与支板(4)之间转动连接有转轴(5),支架(3)上通过销轴铰接有气缸(6)的缸体,气缸(6)的活塞杆端部设有安装座(61),安装座(61)与转轴(5)上的驱动爪板(7)通过销轴铰接,转轴(5)上还均布有若干副爪板(8),支撑板(2)上还设有用于对上料后的包装袋进行吸附的返包组件(9)。
2.根据权利要求1所述的一种拆垛机返包装置,其特征在于:所述返包组件(9)包括安装架(91)、吸盘主体(92)及弹簧(94),支撑板(2)的两侧对称设有安装架(91),吸盘主体(92)通过吸盘导杆(93)滑动连接于安装架(91)上,弹簧(94)套设于吸盘导杆(93)上并位于安装架(91)底部与吸盘主体(92)之间,吸盘导杆(93)外侧设有挡盘(95)并位于安装架(91)的上方,两个吸盘导杆(93)之间通过连接管(96)连接,连接管(96)通过抽气管(97)与真空发生器连接。
3.根据权利要求2所述的一种拆垛机返包装置,其特征在于:所述安装架(91)为“l”字型结构且其上侧通过螺钉与安装板连接。
4.根据权利要求2所述的一种拆垛机返包装置,其特征在于:所述连接管(96)位于安装架(91)上的通孔(911)中。
5.根据权利要求1所述的一种拆垛机返包装置,其特征在于:所述支撑板(2)通过法兰盘(21)与工业机器人(1)的执行器末端连接。
技术总结
本技术公开了一种拆垛机返包装置,涉及机械设备的技术领域,本技术通过气缸、驱动爪板及副爪板对物料袋进行抓取,在抓取时返包组件的吸盘主体会自适应调整移动的位置并在弹簧的作用下与物料袋的上表面进行紧密接触,当物料袋的底部割包操作完成后,物料袋中的原料从物料袋的底部倒入上料装置中,当物料袋中的原料全部倒出后,真空吸盘继续对空的物料袋进行吸附,工业机器人将空的物料袋转移至空的物料袋收集处,从而对空的物料袋进行返包操作。
技术研发人员:王超,王哲,王汝明
受保护的技术使用者:芜湖米思奇智能装备有限公司
技术研发日:20230530
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!