一种AGV叉车避障系统的制作方法
本技术涉及agv叉车结构的,具体为一种agv叉车避障系统。
背景技术:
1、现在常用agv叉车避障系统,其通过安全避障激光雷达扫描前进路线上障碍物,进行提前避障、通过在车体安装触边传感器,障碍物碰撞车体停车避障。安全避障激光雷达只能扫描一个平面,缺少对上方出现障碍物的避障;不能全方位对agv叉车进行保护;且安全避障激光雷达安装位置裸漏在车体外,容易造成损伤。
技术实现思路
1、针对上述问题,本实用新型提供了一种agv叉车避障系统,其能对agv叉车进行全方位避障保护,确保agv叉车的运行安全。
2、一种agv叉车避障系统,其特征在于,其包括:
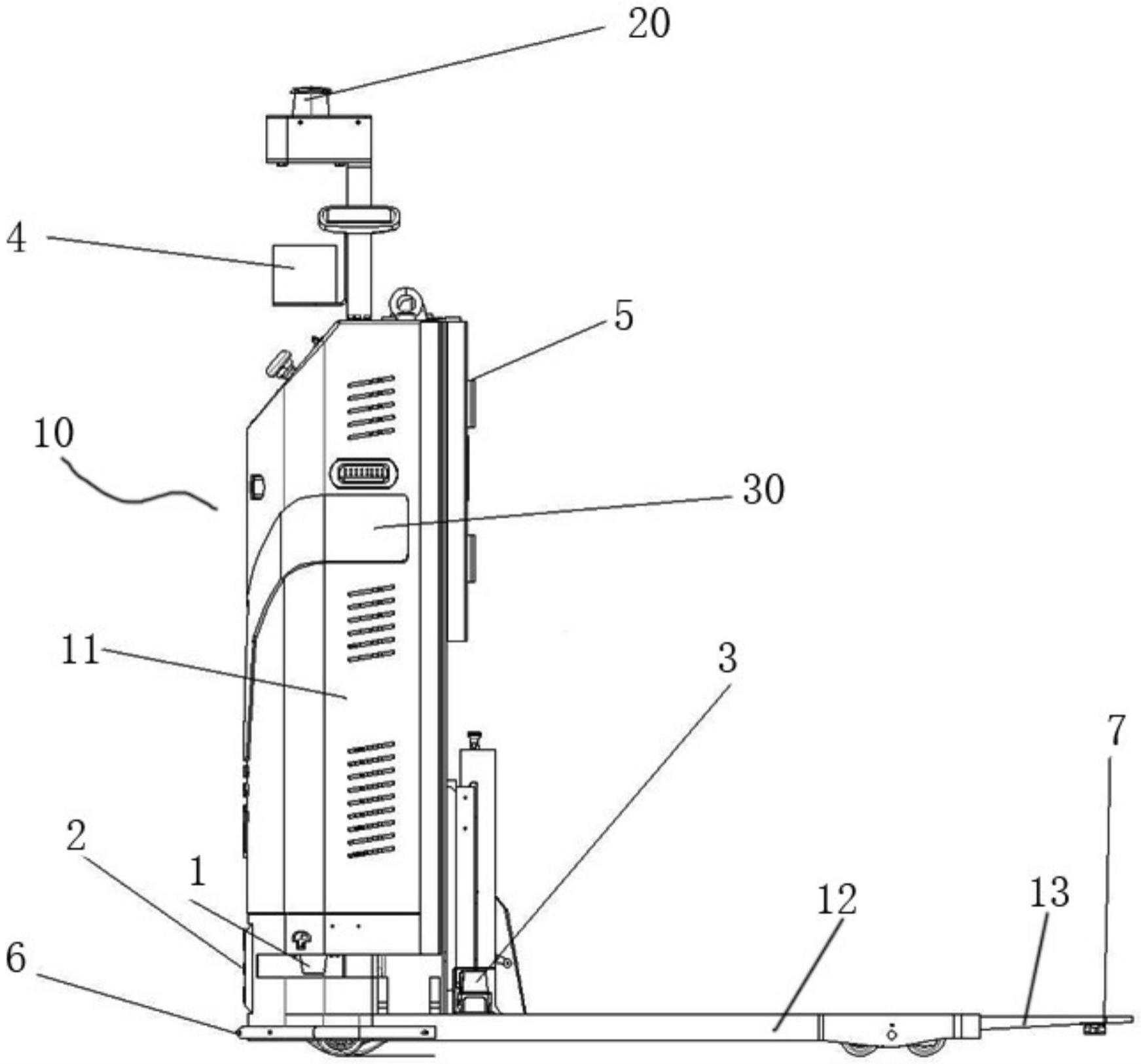
3、车体,其包括车体本部、两侧滚轮支承、升降叉;
4、三组安全避障激光雷达,具体为左前安全避障激光雷达、右前安全避障激光雷达、后部安全避障激光雷达;
5、两个十六线激光雷达,具体为第一十六线激光雷达、第二十六线激光雷达;
6、以及导航激光雷达;
7、所述车体本部的前端两侧的下方区域内嵌有安装腔体,左前安全避障激光雷达、右前安全避障激光雷达分别置于对应所述安装腔体内,两组安全避障激光雷达朝向前方两侧探测,所述车体部分的后方中间位置的下部固设有一安全避障激光雷达,所述左前安全避障激光雷达、右前安全避障激光雷达的检测范围覆盖车头方向与车体两侧,与后部安全避障激光雷达检测范围部分重合,全面检测车体周边状态;
8、所述车体本部的上部位置的前端面固装有第一十六线激光雷达,车体本部的上部位置的后端面固装有第二十六线激光雷达,两组十六线激光雷达组合全面检测运行方向的障碍物,同时避免后方有物体突然进入保护范围;
9、所述导航激光雷达安装于所述车体本部的顶部位置,所述车体本部内设置有车体控制部分,所述车体控制部分分别连接车体本部的运动机构、三组安全避障激光雷达、两个十六线激光雷达、导航激光雷达。
10、其进一步特征在于:
11、其还包括有一条触边传感器,所述触边传感器布置于所述车体本部的底部外周,所述触边传感器连接至所述车体控制部分,当发生意外碰撞时,进行及时快速避让调整作业;
12、其还包括有光电传感器,每个所述升降叉的叉尖的底部固装有一光电传感器,所述光电传感器朝向后方发出感应线,取放货物时,光电传感器检测到后方有障碍物,发送信号给车体控制部分,车体控制部分控制agv叉车减速停止动作。
13、采用上述技术方案后,三组安全避障激光雷达分列于车体本部的左前、右前和后部中心位置部分,且均两安装位置在车体本部内,降低被碰撞的风险,同时安装位置开安装腔体增加了检测范围;左前安全避障激光雷达、右前安全避障激光雷达的检测范围覆盖车头方向与车体两侧,与后部安全避障激光雷达检测范围部分重合,全面检测车体周边状态;两组十六线激光雷达在车体本部前方与后方各一个,agv叉车做各种运动时,都能全面检测运行方向的障碍物,同时避免后方有物体突然进入保护范围;车体控制部分综合分析各安全设备反馈的信号,做出减速、停车的避让动作;能够高效安全的避障,同时降低误触发避障概率;其能对agv叉车进行全方位避障保护,确保agv叉车的运行安全。
技术特征:
1.一种agv叉车避障系统,其特征在于,其包括:
2.如权利要求1所述的一种agv叉车避障系统,其特征在于:其还包括有一条触边传感器,所述触边传感器布置于所述车体本部的底部外周,所述触边传感器连接至所述车体控制部分。
3.如权利要求1或2所述的一种agv叉车避障系统,其特征在于:其还包括有光电传感器,每个所述升降叉的叉尖的底部固装有一光电传感器,所述光电传感器朝向后方发出感应线,取放货物时,光电传感器检测到后方有障碍物,发送信号给车体控制部分,车体控制部分控制agv叉车减速停止动作。
技术总结
本技术提供了一种AGV叉车避障系统,其能对AGV叉车进行全方位避障保护,确保AGV叉车的运行安全。其包括:车体,其包括车体本部、两侧滚轮支承、升降叉;三组安全避障激光雷达,具体为左前安全避障激光雷达、右前安全避障激光雷达、后部安全避障激光雷达;两个十六线激光雷达,具体为第一十六线激光雷达、第二十六线激光雷达;以及导航激光雷达;所述车体本部的前端两侧的下方区域内嵌有安装腔体,左前安全避障激光雷达、右前安全避障激光雷达分别置于对应所述安装腔体内,两组安全避障激光雷达朝向前方两侧探测,所述车体部分的后方中间位置的下部固设有一安全避障激光雷达。
技术研发人员:卢若峰,吴刘成,李俊杰,李建明,周可可,孙金良,于隆煌,邱华,梁金辉,赵子禹,张天然,李世良
受保护的技术使用者:无锡江南智造科技股份有限公司
技术研发日:20230601
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!