一种搬运机器人的制作方法
本技术涉及机器人,尤其涉及一种搬运机器人。
背景技术:
1、搬运机器人为应用机器人运动轨迹实现代替人工搬运的自动化产品,现有的搬运机器人一般分为两种,一种类似人的手臂那种,将货物从流水线上取下放到指定位置,另一种为车体,将货物从一个区域运输到另一个区域。
2、现有的机械臂类的搬运机器人在搬运时,一般通过多个负压吸盘进行货物的吸起,然后进行搬运,这种方式在进行搬运时,对吸盘的气密性要求较高,当负压机或者吸盘上灰尘较多时,会影响吸附强度以及吸附的气密性,使得吸起的货物发生掉落,如不进行承载保护货物直接掉到地面,碰撞较大,如果是易碎品就会造成成品的破损,影响销售。所以需要一种搬运机器人来解决上述问题。
技术实现思路
1、本实用新型的目的是提供一种搬运机器人,解决了现有技术中的搬运机器人不具备货物承接功能,货物掉落后直接落到地面,容易造成货物破损问题。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种搬运机器人,包括机器人本体与设置在机器人本体上的吸盘架,所述机器人本体的侧壁上固定连接有气缸,所述气缸上固定连接有安装框,所述安装框内滑动连接有承载板,所述承载板上设有用于感知压力的压力传感器,所述机器人本体上设有警报器,所述安装框内设有旋转部件与轮齿部件来提供承载板移动所需的动力。
4、优选的,所述旋转部件包括固定连接在安装框侧壁上的两个同步转速的电机,所述电机的输出轴上固定连接有转轴,所述安装框上设有缺口,所述转轴上固定连接有延伸至缺口内的齿轮,旋转部件的设置,能够为承载板的运动提供动力。
5、优选的,所述轮齿部件包括固定连接在承载板上的齿板,所述齿板与齿轮相啮合,所述安装框内设有导向承载板的导向部件,轮齿部件的设置,能够带动承载板的运动。
6、优选的,所述导向部件包括设置在安装框内壁上的导向槽,所述承载板的侧壁上固定连接有与导向槽相配合的滑条,导向部件的设置,能够进行承载板的导向。
7、优选的,所述承载板上设有用于增加承载板稳定性的翻折部件与卡合部件。
8、优选的,所述翻折部件包括设置在承载板上的安装口,所述安装口内通过传动轴转动连接有旋转板,所述承载板内设有腔体,所述腔体内设有微型电机.所述微型电机的输出轴与传动轴固定连接,所述微型电机的输出轴具有自锁功能,翻折部件的设置,能够进行旋转板的旋转,以便卡块与吸盘架配合。
9、优选的,所述卡合部件包括固定连接在旋转板侧壁上的卡块,所述卡块的侧壁与吸盘架相配合,卡合部件的设置,能够使得承载板更加稳定。
10、本实用新型至少具备以下有益效果:
11、1、通过设置旋转部件与轮齿部件,在吸盘架的下端设置一个承载板来进行货物的承接,避免货物从高处掉到地面,使得撞击较大,造成货物的损坏,同时承载板还可以左右移动,避免防止货物时,承载板进行货物的阻挡。
12、2、通过设置翻折部件与卡合部件,能够进行承载板左端的支撑,避免货物落到承载板上时,承载板左端较重发生翘边的现象,使得承载板的支撑更加稳定。
技术特征:
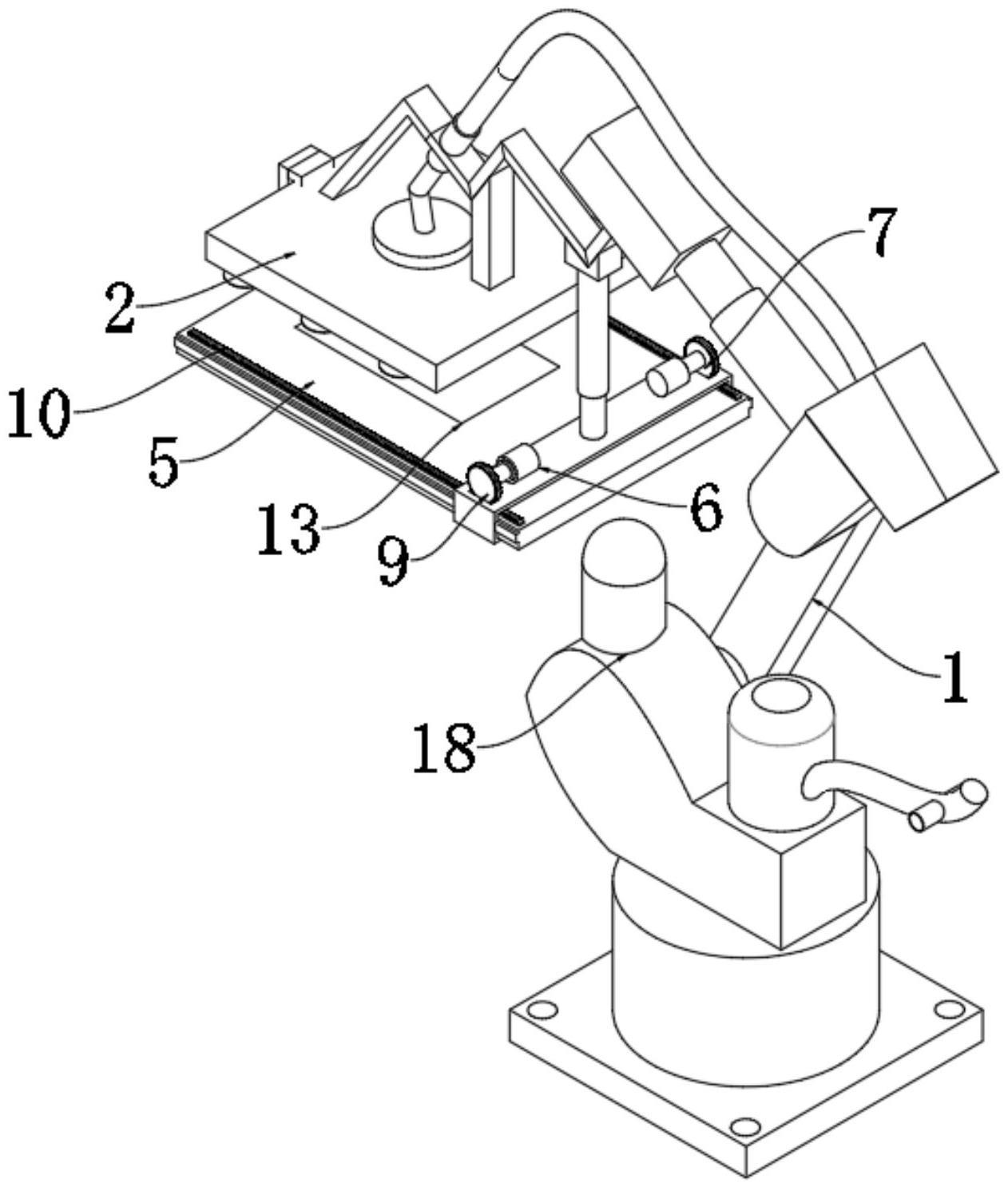
1.一种搬运机器人,包括机器人本体(1)与设置在机器人本体(1)上的吸盘架(2),其特征在于,所述机器人本体(1)的侧壁上固定连接有气缸(3),所述气缸(3)上固定连接有安装框(4),所述安装框(4)内滑动连接有承载板(5),所述承载板(5)上设有用于感知压力的压力传感器(13),所述机器人本体(1)上设有警报器(18),所述安装框(4)内设有旋转部件与轮齿部件来提供承载板(5)移动所需的动力。
2.根据权利要求1所述的一种搬运机器人,其特征在于,所述旋转部件包括固定连接在安装框(4)侧壁上的两个同步转速的电机(6),所述电机(6)的输出轴上固定连接有转轴(7),所述安装框(4)上设有缺口(8),所述转轴(7)上固定连接有延伸至缺口(8)内的齿轮(9)。
3.根据权利要求2所述的一种搬运机器人,其特征在于,所述轮齿部件包括固定连接在承载板(5)上的齿板(10),所述齿板(10)与齿轮(9)相啮合,所述安装框(4)内设有导向承载板(5)的导向部件。
4.根据权利要求3所述的一种搬运机器人,其特征在于,所述导向部件包括设置在安装框(4)内壁上的导向槽(11),所述承载板(5)的侧壁上固定连接有与导向槽(11)相配合的滑条(12)。
5.根据权利要求1所述的一种搬运机器人,其特征在于,所述承载板(5)上设有用于增加承载板(5)稳定性的翻折部件与卡合部件。
6.根据权利要求5所述的一种搬运机器人,其特征在于,所述翻折部件包括设置在承载板(5)上的安装口(14),所述安装口(14)内通过传动轴转动连接有旋转板(15),所述承载板(5)内设有腔体,所述腔体内设有微型电机(16).所述微型电机(16)的输出轴与传动轴固定连接,所述微型电机(16)的输出轴具有自锁功能。
7.根据权利要求6所述的一种搬运机器人,其特征在于,所述卡合部件包括固定连接在旋转板(15)侧壁上的卡块(17),所述卡块(17)的侧壁与吸盘架(2)相配合。
技术总结
本技术涉及机器人技术领域,尤其涉及一种搬运机器人,解决了现有技术中搬运机器人不具备货物承接功能,货物掉落后直接落到地面,容易造成货物破损问题。一种搬运机器人,包括机器人本体与设置在机器人本体上的吸盘架,所述机器人本体的侧壁上固定连接有气缸,所述气缸上固定连接有安装框,所述安装框内滑动连接有承载板,所述承载板上设有用于感知压力的压力传感器,所述机器人本体上设有警报器,所述安装框内设有旋转部件与轮齿部件来提供承载板移动所需的动力。本技术在吸盘架的下端设置一个承载板来进行货物的承接,避免货物从高处掉到地面,造成货物的损坏。
技术研发人员:潘攀
受保护的技术使用者:广西自贸区港创智睿实业有限公司
技术研发日:20230606
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!