一种伸缩臂叉装车的制作方法
本技术涉及叉装车,具体涉及一种伸缩臂叉装车。
背景技术:
1、伸缩臂叉装车属于工程机械的细分领域,它主要替代汽车起重机和随车吊,既能实现起吊的功能,又能实现叉装的功能,相比现有工程机械,伸缩臂叉装车对狭窄场地适应性更强,挪动设备频次低,实现功能比起重机齐全,属具灵活多样,作业人数少,作业效率高,因此广泛应用于工业、建筑业等工况。
2、伸缩臂叉装车在作业过程中会通过臂架调节其作业高度和作业幅度,伸缩臂叉装车的作业高度越高,作业幅度越大时,其整车重量也会越重,因此,为保证整车的稳定性,通常会在底盘设置配重以增加整车自重而提高整车的稳定力矩。其中,配重质量依额定载荷而定,然而,伸缩臂叉装车可以实现多种物料搬运,而且其实际载荷通常远低于额定载荷,故满足车身平衡所需配重质量较小,因此,大多数作业工况下,配重的质量具有冗余部分,这导致整车功耗增加和浪费。此外,由于臂架的伸缩、变幅运动以及载荷的变化等诸多因素,整车的重心也时时在发生变化,若重心位置偏移过大,容易造成倾翻事故。
技术实现思路
1、本实用新型的目的在于提供一种伸缩臂叉装车,用以解决现有伸缩臂叉装车依额定载荷而定的配重造成整车功耗增加、重心位置偏移过大容易造成倾翻事故等技术问题。
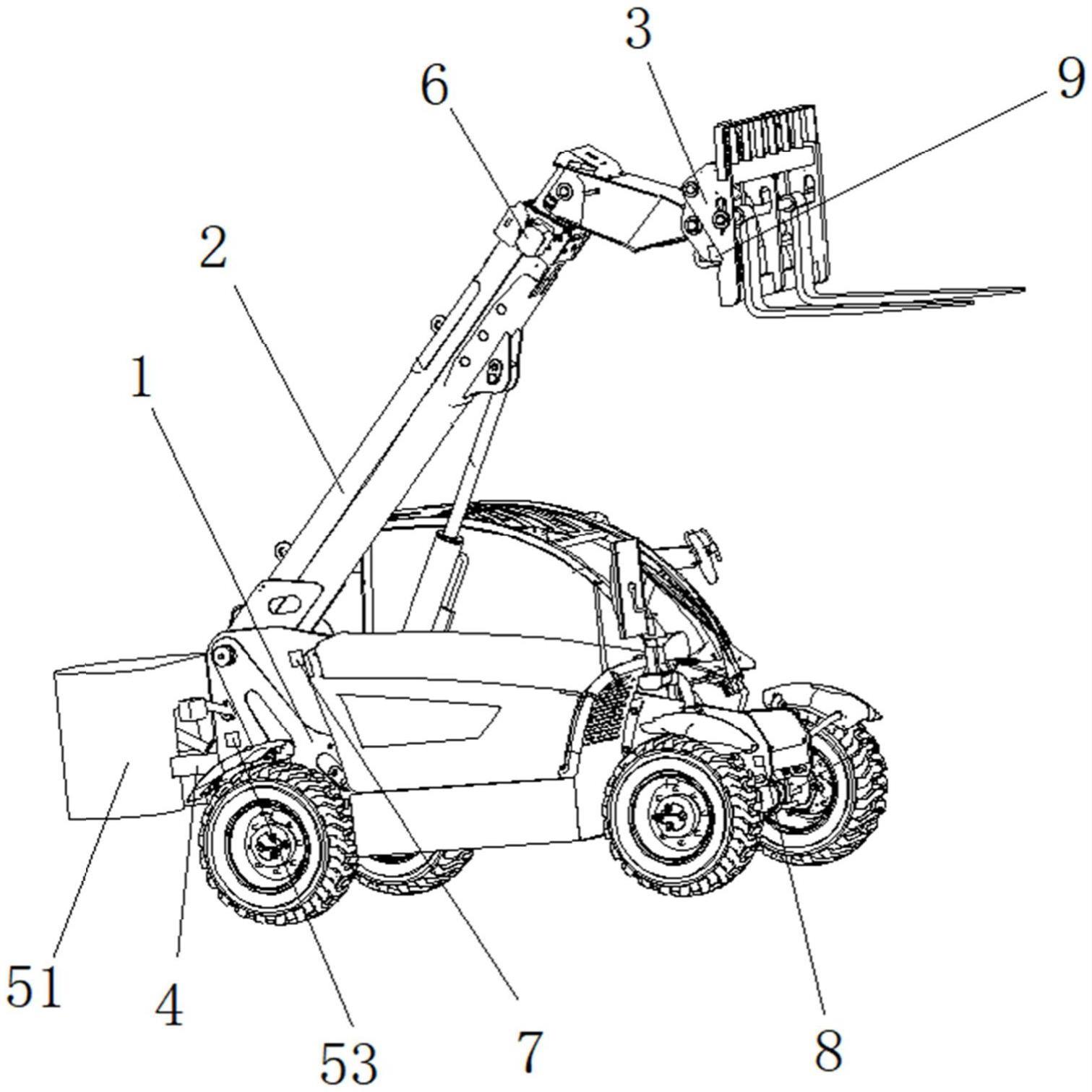
2、为实现上述目的,本实用新型提供一种伸缩臂叉装车,包括控制器、底盘、臂架和货叉,所述底盘后部设有支撑结构,所述伸缩臂叉装车还包括配重组件,所述配重组件包括配重本体、驱动装置和位置检测装置,所述配重本体安装于所述支撑结构,所述驱动装置能够驱动所述配重本体沿所述伸缩臂叉装车的前后方向移动,所述位置检测装置用于检测所述配重本体与所述底盘之间的距离并反馈至所述控制器。
3、本实用新型所公开的伸缩臂叉装车还具有以下附加技术特征:
4、所述支撑结构包括固定件和活动件,所述固定件与所述底盘固定连接,所述配重本体安装于所述活动件,所述活动件可移动地设于所述固定件。
5、所述固定件设有沿所述伸缩臂叉装车的前后方向延伸的导向孔,所述活动件可滑动地设于所述导向孔内。
6、所述配重本体可拆卸地安装于所述活动件。
7、所述驱动装置为伸缩油缸,所述伸缩油缸的活塞杆的伸缩移动带动所述配重本体移动。
8、所述伸缩油缸的缸体与所述底盘铰接,所述伸缩油缸的活塞杆与所述配重本体铰接。
9、所述位置检测装置为第一拉绳位移传感器,所述第一拉绳位移传感器的主体固定于所述底盘,所述第一拉绳位移传感器的拉绳与所述配重本体连接。
10、所述配重本体的横截面的截面积自前向后逐渐减小,所述支撑结构连接于所述配重本体的前端。
11、所述伸缩臂叉装车还包括信息采集单元,所述信息采集单元用于检测所述臂架的伸长量、所述臂架的变幅角度、所述底盘与水平面的夹角、所述货叉上的货物的载荷,并向所述控制器执行反馈。
12、所述信息采集单元包括第二拉绳位移传感器、角度传感器、倾角传感器和称重传感器,所述第二拉绳位移传感器用于检测所述臂架的伸长量,所述角度传感器用于检测所述臂架的变幅角度,所述倾角传感器用于检测所述底盘与水平面的夹角,所述称重传感器用于检测所述货叉上的货物的载荷。
13、由于采用了上述技术方案,本实用新型至少具有以下技术效果:本申请所提供的伸缩臂叉装车,底盘上设置的支撑结构用于支撑配重本体,驱动装置能够驱动述配重本体沿伸缩臂叉装车的前后方向移动,配重本体前后移动过程中能够改变整车的重心位置,当配重本体移动至符合整车作业工况的理想位置时,可使该整车的力矩保持平衡,相比传统采用固定式配重的伸缩臂叉装车而言,本申请的伸缩臂叉装车实现了配重本体可移动式设计,在相同作业高度和作业幅度下,不仅减轻了整车重量,有助于降低作业功耗,提高经济性及机动性,还有效提高了稳定性和安全性。位置检测装置用于检测配重本体与底盘之间的距离并反馈至控制器,控制器可根据配重本体的位置变化合理计算重心位置,当配重本体移动至一使整车重心比较合理的位置时,可通过控制器控制驱动装置停止,保持配重本体所在位置,保证整车稳定力矩,降低发生倾翻的可能性。
技术特征:
1.一种伸缩臂叉装车,包括控制器、底盘、臂架和货叉,其特征在于,所述底盘后部设有支撑结构,所述伸缩臂叉装车还包括配重组件,所述配重组件包括配重本体、驱动装置和位置检测装置,所述配重本体安装于所述支撑结构,所述驱动装置能够驱动所述配重本体沿所述伸缩臂叉装车的前后方向移动,所述位置检测装置用于检测所述配重本体与所述底盘之间的距离并反馈至所述控制器。
2.根据权利要求1所述的伸缩臂叉装车,其特征在于,
3.根据权利要求2所述的伸缩臂叉装车,其特征在于,
4.根据权利要求3所述的伸缩臂叉装车,其特征在于,
5.根据权利要求3所述的伸缩臂叉装车,其特征在于,
6.根据权利要求5所述的伸缩臂叉装车,其特征在于,
7.根据权利要求1所述的伸缩臂叉装车,其特征在于,
8.根据权利要求1所述的伸缩臂叉装车,其特征在于,
9.根据权利要求1所述的伸缩臂叉装车,其特征在于,
10.根据权利要求9所述的伸缩臂叉装车,其特征在于,
技术总结
本申请公开一种伸缩臂叉装车,包括控制器、底盘、臂架和货叉,所述底盘后部设有支撑结构,所述伸缩臂叉装车还包括配重组件,所述配重组件包括配重本体、驱动装置和位置检测装置,所述配重本体安装于所述支撑结构,所述驱动装置能够驱动所述配重本体沿所述伸缩臂叉装车的前后方向移动,所述位置检测装置用于检测所述配重本体与所述底盘之间的距离并反馈至所述控制器。本申请的伸缩臂叉装车实现了配重本体可移动式设计,在相同作业高度和作业幅度下,不仅减轻了整车重量,有助于降低作业功耗,提高经济性及机动性,还有效提高了整车稳定性和安全性。
技术研发人员:朱鑫鑫,张涛,张佳栋,尹文超,王德红
受保护的技术使用者:临工重机股份有限公司
技术研发日:20230605
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!