一种AGV智能搬运机器人货架矫正机构的制作方法
本申请涉及搬运机器人货架约束,尤其是涉及一种agv智能搬运机器人货架矫正机构。
背景技术:
1、在“cn213949577u”中公开了“一种agv智能搬运机器人的货架校正装置,包括壳体、支撑板以及设置在支撑板上货架矫正组件……所述防滑垫为弹性材质。”其通过在支撑板上安装多个货架矫正组件,通过货架矫正组件上的倾斜边使位于货架矫正组件上的货架滑落至合适位置,同时货架矫正组件卡住货架进行定位,实现了对货架位置进行调整的同时还对货架进行了定位,增加了货架在运输过程中的稳定性;
2、针对上述中的相关技术,发明人认为,其通过固定安装在支撑板上的多个货架矫正组件卡住货架进行定位,在针对不同规格的货架上,无法做到灵活调节货架矫正组件的位置,适应限位间距小于支撑盘的任意尺寸规格货架,实用性受到限制;
3、本背景技术所公开的上述信息仅仅用于增加对本申请背景技术的理解,因此,其可能包括不构成本领域普通技术人员已知的现有技术。
技术实现思路
1、为了解决其通过固定安装在支撑板上的多个货架矫正组件卡住货架进行定位,在针对不同规格的货架上,无法做到灵活调节货架矫正组件的位置,适应不同尺寸规格的货架,实用性受到限制的问题,本申请提供一种agv智能搬运机器人货架矫正机构。
2、本申请提供的一种agv智能搬运机器人货架矫正机构采用如下的技术方案:
3、一种agv智能搬运机器人货架矫正机构,包括下支撑组件,所述下支撑组件包括下支撑板,所述下支撑板的顶部设置有若干个导向槽,所述导向槽内设置有货架矫正组件,所述下支撑板的顶部设置有驱动组件,所述驱动组件包括转动设置在下支撑板上的上支撑板。
4、优选的,所述下支撑板的侧面设置有两个连接耳,两个所述连接耳的内侧设置有蜗杆,所述蜗杆的一端穿过连接耳且与连接耳转动连接。
5、优选的,所述上支撑板的外侧设置有驱动环,所述驱动环上设置有与蜗杆配合使用的齿纹,所述齿纹与蜗杆啮合。
6、优选的,所述上支撑板的顶部设置有防滑垫,所述上支撑板与防滑垫的表面均设置有弧形槽。
7、优选的,所述货架矫正组件包括滑动设置在导向槽内的导向块,所述导向块上设置有与弧形槽配合使用的滑块,若干个所述滑块分别滑动设置在对应的弧形槽内,所述滑块的上端设置有矫正垫片。
8、综上所述,本申请包括以下有益技术效果:
9、1、通过上支撑板转动带动弧形槽转动,驱动滑块移动,由于导向槽对导向块的限制,使得导向块沿着导向槽移动,调整矫正垫片相对于上支撑板圆形的距离;相较于现有技术,可以实现调整矫正垫片之间的距离,可以适用于不同规格的货架,通用性较强;
10、2、通过转动蜗杆驱动使得驱动环转动,使得上支撑板转动带动弧形槽转动,调节滑块的位置,利用蜗杆与驱动环结构的自锁性与驱动精度,实现高精度的操作,操作方便。
技术特征:
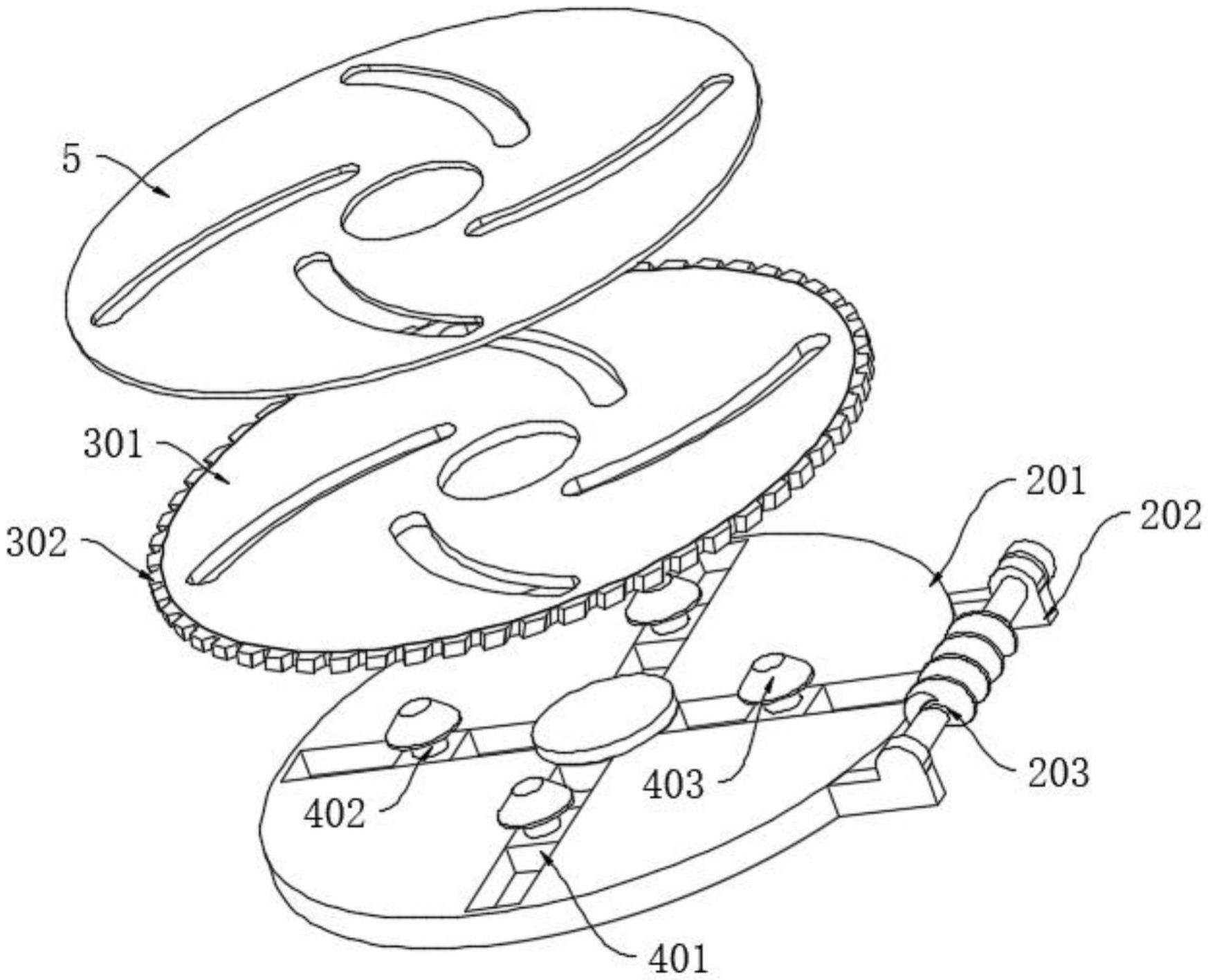
1.一种agv智能搬运机器人货架矫正机构,包括下支撑组件(2),其特征在于:所述下支撑组件(2)包括下支撑板(201),所述下支撑板(201)的顶部设置有若干个导向槽,所述导向槽内设置有货架矫正组件(4),所述下支撑板(201)的顶部设置有驱动组件(3),所述驱动组件(3)包括转动设置在下支撑板(201)上的上支撑板(301)。
2.根据权利要求1所述的一种agv智能搬运机器人货架矫正机构,其特征在于:所述下支撑板(201)的侧面设置有两个连接耳(202),两个所述连接耳(202)的内侧设置有蜗杆(203),所述蜗杆(203)的一端穿过连接耳(202)且与连接耳(202)转动连接。
3.根据权利要求1所述的一种agv智能搬运机器人货架矫正机构,其特征在于:所述上支撑板(301)的外侧设置有驱动环(302),所述驱动环(302)上设置有与蜗杆(203)配合使用的齿纹,所述齿纹与蜗杆(203)啮合。
4.根据权利要求1所述的一种agv智能搬运机器人货架矫正机构,其特征在于:所述上支撑板(301)的顶部设置有防滑垫(5),所述上支撑板(301)与防滑垫(5)的表面均设置有弧形槽。
5.根据权利要求1所述的一种agv智能搬运机器人货架矫正机构,其特征在于:所述货架矫正组件(4)包括滑动设置在导向槽内的导向块(401),所述导向块(401)上设置有与弧形槽配合使用的滑块(402),若干个所述滑块(402)分别滑动设置在对应的弧形槽内,所述滑块(402)的上端设置有矫正垫片(403)。
技术总结
本申请涉及搬运机器人货架约束技术领域,且公开了一种AGV智能搬运机器人货架矫正机构,包括下支撑组件,所述下支撑组件包括下支撑板,所述下支撑板的顶部设置有若干个导向槽,所述导向槽内设置有货架矫正组件,所述下支撑板的顶部设置有驱动组件,所述驱动组件包括转动设置在下支撑板上的上支撑板;本申请通过转动蜗杆驱动使得驱动环转动,使得上支撑板转动带动弧形槽转动,驱动滑块移动,由于导向槽对导向块的限制,使得导向块沿着导向槽移动,调整矫正垫片相对于上支撑板圆形的距离;相较于现有技术,可以实现调整矫正垫片之间的距离,可以适用于不同规格的货架,通用性较强、操作方便。
技术研发人员:李士亲,李泽平,丁红侠
受保护的技术使用者:合肥屹强机械科技有限公司
技术研发日:20230616
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!