一种可调节叉臂间距的叉车的制作方法
本技术一般地涉及叉车作业。更具体地,本技术涉及一种可调节叉臂间距的叉车。
背景技术:
1、叉车是用于把较重的货物抬起并搬运到指定位置,其应用领域越来越广。由于货叉通常设计成容易装卸货的结构,方便进行货物的装卸。以tac(三醋酸纤维素酯薄膜,triacetyl cellulose)卷材为例,其是用于制造偏光片的光学薄膜,价格比较昂贵,因此,如果操作不当,tac卷材很容易从货叉上跌落,造成tac卷材破损,且还存在安全隐患。
2、其中,授权公告号为cn 210505428 u、实用新型名称为“一种可调节宽度的液控式叉车保护臂”,公开了用于驱动货物保护臂转动的双向电机,双向电机能够驱动保护臂转动,采用上述的结构后,实现从不同宽度抱住货物,使货物在运送过程中不偏移和脱落的目的。
3、上述现有技术中,在货物移动过程中,虽然能够避免货物的脱落的问题,但是,其还需要设置一套保护臂的结构,增加了叉车结构的复杂度。
4、因此,如何解决货物脱落以及叉车结构的复杂度的问题是目前需要解决的技术问题。
技术实现思路
1、为解决上述一个或多个技术问题,本实用新型提出通过在水平货叉滑轨的左右两侧设置第一极限传感器组和第二极限传感器组,避免了货物整体水平向左或向右移动时,由于第一叉臂与第二叉臂不能同步移动而产生的叉臂间距和货物尺寸不匹配,而导致货物脱落而产生破损的问题,保证了货物整体移动的可靠性,且仅通过设置两组传感器组就能避免货物的脱落,使得叉车的结构上更简单。为此,本实用新型在如下的一个方面中提供方案。
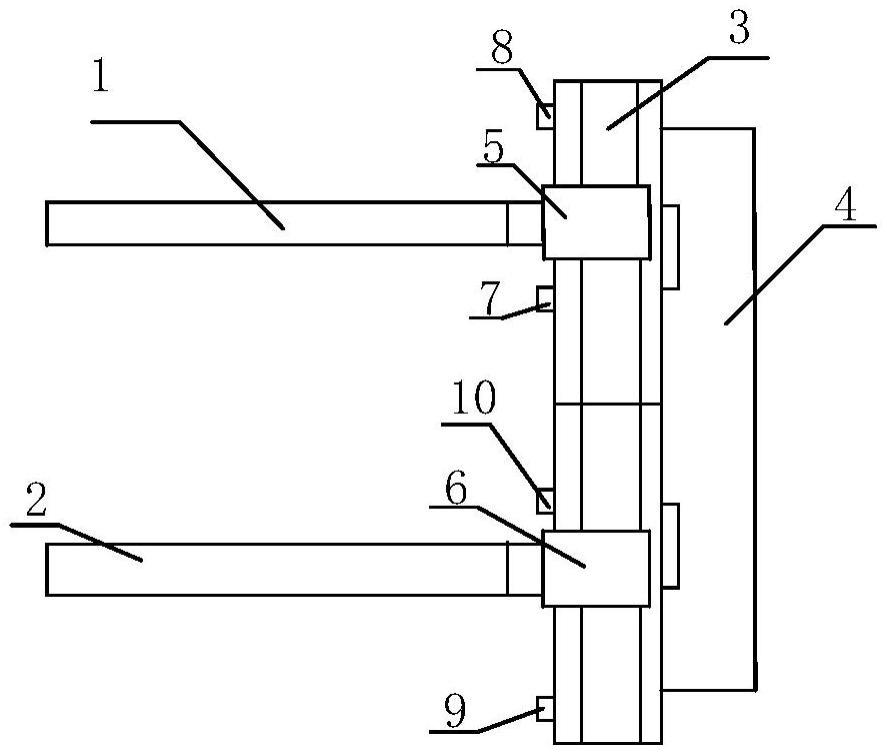
2、本实用新型提供的一种可调节叉臂间距的叉车,包括车体,货叉,升降机构,还包括水平货叉滑轨,与升降机构滑动配合连接,用于所述货叉的水平移动;
3、货叉包括第一叉臂和第二叉臂,所述第一叉臂和第二叉臂分别通过滑轨基座设置在水平货叉滑轨上;
4、第一极限传感器组包括第一内极限传感器和第一外极限传感器,第二极限传感器组包括第二内极限传感器和第二外极限传感器;所述第一内极限传感器和第一外极限传感器分别设置在第一叉臂的两侧,且固定设置于水平货叉滑轨的一端;所述第二内极限传感器和第二外极限传感器分别设置在第二叉臂的两侧,且固定设置于背离水平货叉滑轨一端的另一端;
5、控制器,用于控制连接第一驱动机构、第二驱动机构、第一极限传感器组和第二极限传感器组;第一驱动机构和第二驱动机构分别用于驱动第一叉臂和第二叉臂的滑轨基座的滑动。
6、优选地,所述第一内极限传感器与第二内极限传感器均位于第一叉臂和第二叉臂之间的水平货叉滑轨上。
7、优选地,第一内极限传感器与第二外极限传感器的位置距离小于等于叉臂的设定间距;第一外极限传感器与第二内极限传感器的位置距离小于等于叉臂的设定间距;所述叉臂的设定间距根据货物的宽幅确定。
8、优选地,所述第一驱动机构和第二驱动机构均采用油缸驱动。
9、优选地,所述第一叉臂和所述第二叉臂平行布置。
10、优选地,所述第一极限传感器组和第二极限传感器组中的传感器均采用极限开关传感器。
11、本实用新型的有益效果为:
12、1.本实用新型通过分别控制第一驱动机构和第二驱动机构,进行两叉臂的滑动,实现了两叉臂间距的调整;
13、2.本实用新型通过在水平货叉滑轨的左右两侧设置第一极限传感器组和第二极限传感器组,能够实时感应到两叉臂的位置,实现两叉臂的滑动范围的限制,使得两叉臂整体水平向左或者向右移动时,两叉臂的间距维持在滑动范围内,避免货物的脱落,提高了叉车工作的可靠性;
14、3.本实用新型仅需设置两组传感器组,使得叉车的机械结构更简单。
技术特征:
1.一种可调节叉臂间距的叉车,包括车体,货叉,升降机构,其特征在于,还包括水平货叉滑轨,与升降机构滑动配合连接,用于所述货叉的水平移动;
2.根据权利要求1所述的一种可调节叉臂间距的叉车,其特征在于,所述第一内极限传感器与第二内极限传感器均位于第一叉臂和第二叉臂之间的水平货叉滑轨上。
3.根据权利要求1所述的一种可调节叉臂间距的叉车,其特征在于,第一内极限传感器与第二外极限传感器的位置距离小于等于叉臂的设定间距;第一外极限传感器与第二内极限传感器的位置距离小于等于叉臂的设定间距;所述叉臂的设定间距根据货物的宽幅确定。
4.根据权利要求1所述的一种可调节叉臂间距的叉车,其特征在于,所述第一驱动机构和第二驱动机构均采用油缸驱动。
5.根据权利要求1所述的一种可调节叉臂间距的叉车,其特征在于,所述第一叉臂和所述第二叉臂平行布置。
6.根据权利要求1所述的一种可调节叉臂间距的叉车,其特征在于,所述第一极限传感器组和第二极限传感器组中的传感器均采用极限开关传感器。
技术总结
本技术涉及叉车作业技术领域,具体涉及一种可调节叉臂间距的叉车,包括第一内极限传感器、第一外极限传感器、第二内极限传感器和第二外极限传感器;第一内极限传感器和第一外极限传感器分别设置在第一叉臂的两侧,且固定设置于水平货叉滑轨的一端;第二内极限传感器和第二外极限传感器分别设置在第二叉臂的两侧,且固定设置于背离水平货叉滑轨一端的另一端;控制器,用于控制连接第一驱动机构、第二驱动机构、第一极限传感器组和第二极限传感器组;第一驱动机构和第二驱动机构分别驱动第一叉臂和第二叉臂滑动。即本技术能够在两叉臂整体水平向左或向右移动时,维持两叉臂间距在限制的滑动范围内,避免货物脱落,提高了叉车的可靠性。
技术研发人员:龚光涛,严是乐,梁奋,钟伟钊,邓达
受保护的技术使用者:杉金光电(广州)有限公司
技术研发日:20230627
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!