一种钢网搬运机器人的制作方法
本技术涉及钢网搬运,尤其涉及一种钢网搬运机器人。
背景技术:
1、钢网又称smt模板(smtstencil),是一种smt专用模具。在pcb(printedcircuitboard,印制电路板)印刷过程中,印刷设备利用钢网上的预先制定的小孔能够准确地将锡膏沉积漏印于pcb上。当pcb板型号变更或钢网损坏时,操作人员需要对印刷机中的钢网进行更换。
2、为了提升钢网更换效率,通常在印刷机线边设置存储货架,存储待用的新钢网和更换的旧钢网。现有技术中,当存储货架需要补充新钢网或者需要移出旧钢网时,通常采用推车进行新旧钢网的转移。例如,从仓库中转移新钢网至存储货架;或者,从存储货架上将旧货架移送至清洗室进行清洗,由于车间通常具有较为严格的区域划分,各区域的距离较远,传统搬运方式运输效率低,另一方面,在运输时普通推车难以保证其内部大量钢网的稳定性,因此运输安全性较低的同时也极易造成钢网之间的碰撞损伤。
技术实现思路
1、为此,本实用新型所要解决的技术问题在于克服现有技术中运输效率低且安全稳定性差的问题,提供一种能够稳定快速搬运钢网的自动化钢网搬运机器人。
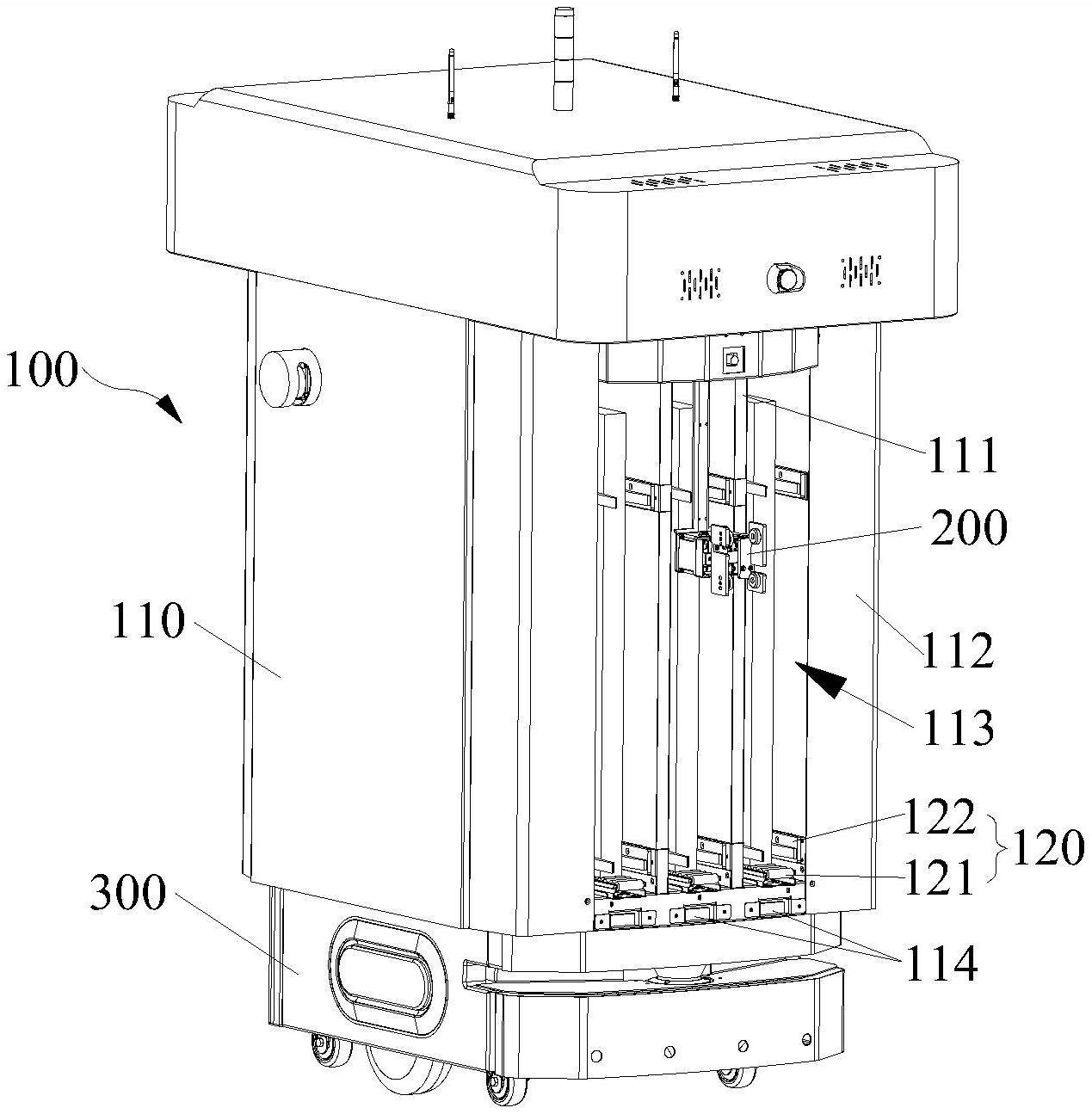
2、为解决上述技术问题,本实用新型提供了一种钢网搬运机器人,包括:移送主体;缓存组件,包括设于移送主体上的缓存主体以及设于缓存主体内的引导机构;所述缓存主体内间隔形成多个用于存放钢网的缓存空间;所述引导机构包括设于缓存空间底部的第一引导机构以及缓存空间两侧的第二引导机构;夹持组件,包括设于缓存主体上的平移机构以及至少一个与平移机构连接的夹持机构;所述平移机构被设置为至少能够在沿缓存空间的深度方向驱动所述夹持机构,以使所述夹持机构夹持所述钢网进出缓存空间。
3、在本实用新型的一个实施例中,所述第一引导机构包括设于缓存空间底部并沿缓存空间深度方向延伸的引导底座及多个转动连接于所述引导底座上的引导辊轮。
4、在本实用新型的一个实施例中,所述引导底座自下而上凹陷形成导向凹槽;所述导向凹槽被设置为沿引导底座的长度方向延伸形成槽形结构。
5、在本实用新型的一个实施例中,所述第二引导机构包括与缓存空间一侧固定连接的安装侧板,与安装侧板滑动连接的引导侧板,以及多个设于安装侧板与引导侧板之间的弹性件;所述弹性件的两端分别抵靠所述安装侧板和所述引导侧板。
6、在本实用新型的一个实施例中,所述第二引导机构还包括支撑轴及限位件,所述支撑轴的一端与引导侧板固定连接,所述支撑轴的另一端分别水平贯穿弹性件和安装侧板后与所述限位件连接
7、在本实用新型的一个实施例中,所述缓存主体还包括设置于所述第一引导机构下方的落料槽。
8、在本实用新型的一个实施例中,所述夹持机构包括与平移机构固定连接的夹持底座、固定于夹持底座的夹持支架以及与夹持支架连接的电动夹爪;所述电动夹爪包括至少两个移动块及至少两个夹持手指,所述夹持手指一一对应地固定于所述移动块,并通过移动块的相对运动控制所述夹持手指的开合。
9、在本实用新型的一个实施例中,所述电动夹爪包括两个移动块,所述两个移动块上下平行设置,且移动方向相反。
10、在本实用新型的一个实施例中,所述夹持手指包括与移动块固定连接的连接部以及与连接部固定的并用于夹持钢网的夹持部;夹持部上设有避让缺口。
11、在本实用新型的一个实施例中,连接部上开设有多个用于设置连接件的连接孔,所述避让缺口与连接孔平齐,并避开夹持部的中部位置。
12、本实用新型的上述技术方案相比现有技术具有以下优点:
13、本实用新型所述的钢网搬运机器人,能够通过夹持组件将钢网对应独立承载于多个缓存空间中,并且随移送主体在搬运空间内自动移动,一方面,本钢网搬运机器人能够同时搬运多个钢网,大大提高了钢网搬运效率,另一方面,本钢网搬运机器人通过缓存组件及夹持组件之间的配合,确保搬运过程始终稳定,进而提高了对钢网的保护程度。
技术特征:
1.一种钢网搬运机器人,其特征在于:包括:
2.根据权利要求1所述的钢网搬运机器人,其特征在于,所述第一引导机构包括设于缓存空间底部并沿所述缓存空间深度方向延伸的引导底座及多个转动连接于所述引导底座上的引导辊轮。
3.根据权利要求2所述的钢网搬运机器人,其特征在于,所述引导底座自下而上凹陷形成导向凹槽;所述导向凹槽被设置为沿引导底座的长度方向延伸形成槽形结构。
4.根据权利要求1所述的钢网搬运机器人,其特征在于,所述第二引导机构包括与缓存空间一侧固定连接的安装侧板,与所述安装侧板滑动连接的引导侧板,以及多个设于所述安装侧板与所述引导侧板之间的弹性件;所述弹性件的两端分别抵靠所述安装侧板和所述引导侧板。
5.根据权利要求4所述的钢网搬运机器人,其特征在于,所述第二引导机构还包括支撑轴及限位件,所述支撑轴的一端与引导侧板固定连接,所述支撑轴的另一端分别水平贯穿所述弹性件和所述安装侧板后与所述限位件连接。
6.根据权利要求1所述的钢网搬运机器人,其特征在于,所述缓存主体还包括设置于所述第一引导机构下方的落料槽。
7.根据权利要求1所述的钢网搬运机器人,其特征在于,所述夹持机构包括与所述平移机构固定连接的夹持底座、固定于夹持底座的夹持支架以及与所述夹持支架连接的电动夹爪;所述电动夹爪包括至少两个移动块及至少两个夹持手指,所述夹持手指一一对应地固定于所述移动块,并通过所述移动块的相对运动控制所述夹持手指的开合。
8.根据权利要求7所述的钢网搬运机器人,其特征在于,所述电动夹爪包括两个所述移动块,所述两个移动块上下平行设置,且移动方向相反。
9.根据权利要求8所述的钢网搬运机器人,其特征在于,所述夹持手指包括与所述移动块固定连接的连接部以及与连接部固定的并用于夹持钢网的夹持部;所述夹持部上设有避让缺口。
10.根据权利要求9所述的钢网搬运机器人,其特征在于,所述连接部上开设有多个用于设置连接件的连接孔,所述避让缺口与连接孔平齐,并避开所述夹持部的中部位置。
技术总结
本技术提供一种钢网搬运机器人,包括:移送主体;缓存组件,包括设于移送主体上的缓存主体以及设于缓存主体内的引导机构;缓存主体内间隔形成多个用于存放钢网的缓存空间;引导机构包括设于缓存空间底部的第一引导机构以及缓存空间两侧的第二引导机构;夹持组件,包括设于缓存主体上的平移机构以及与平移机构连接的夹持机构;平移机构被设置为至少能够在沿缓存空间的深度方向驱动夹持机构,以使夹持机构夹持钢网进出缓存空间。本钢网搬运机器人,能够通过夹持组件将钢网对应独立承载与多个缓存空间中,并且随移送主体在搬运空间内自动移动,能够同时搬运多个钢网,提高了钢网搬运效率,并且搬运过程始终稳定,进一步提高了对钢网的保护程度。
技术研发人员:付林霄,陈乾坤,任开文,郭宇豪
受保护的技术使用者:苏州玖物智能科技股份有限公司
技术研发日:20230703
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!