一种地牛AMR的制作方法
本技术属于地牛,具体是涉及一种地牛amr。
背景技术:
1、随着对物流机器人的需求越来越强烈,过去几年,物流机器人在快递仓储行业迎来了爆发式的增长。近些年,在制造业场景,越来越多的自动化物流需求被提出,传统的agv小车由于其本身技术的原因,在制造业场景暴露出越来越多的问题,如agv小车利用电磁轨道来设立其行进路径,电磁轨道黏贴于地板上,agv小车依靠电磁轨道所带来的讯息进行移动与动作,因此只能遵循固定线路,如需改变线路,则需要重新进行设置规划和地面布局,且在移动过程中一旦遇到障碍物,只能停止运作。同时,传统的agv小车通常只具有搬运的功能,而不具有装卸拿取的功能。
2、因此需要提出一种新的方案来解决上述问题。
技术实现思路
1、本实用新型主要是解决上述现有技术所存在的技术问题,提供一种地牛amr。
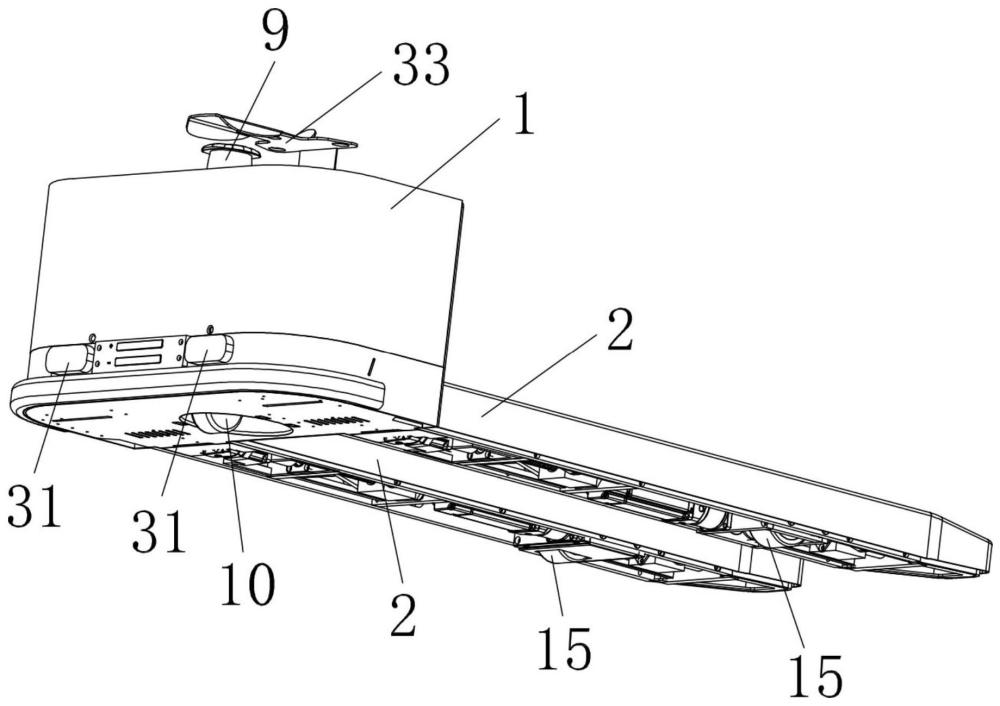
2、本实用新型的上述技术问题主要是通过下述技术方案得以解决的:一种地牛amr,包括车头、位于车头内侧的叉车机构、以及位于车头内的amr控制器,所述叉车机构设有两个,呈对称设置,每个所述叉车机构均包括叉腿主梁、及盖设在叉腿主梁上的叉套,所述叉腿主梁内设有行走装置,两个所述行走装置分别独立电连接amr控制器,所述叉腿主梁内还设有顶升装置,并通过顶升装置驱动叉套相对于叉腿主梁竖直运动,所述叉腿主梁的前端设有漫反射光电传感器,所述车头的顶部设有导航模块,所述amr控制器分别与顶升装置、漫反射光电传感器和导航模块电连接,所述车头的底部安装有万向轮。
3、作为优选,所述行走装置包括行走驱动电机、螺旋伞小齿轮、螺旋伞大齿轮、驱动轮、以及驱动轮轴,所述行走驱动电机安装在叉腿主梁的内侧壁上,所述行走驱动电机的输出端连接螺旋伞小齿轮,所述驱动轮轴的两端分别转动连接叉腿主梁两侧的内壁,所述驱动轮和螺旋伞大齿轮安装在驱动轮轴上,所述螺旋伞大齿轮啮合螺旋伞小齿轮。
4、作为优选,所述顶升装置包括拉杆、与拉杆两端相连接的两个顶升组件、滑杆、丝杆、以及顶升驱动电机,所述顶升驱动电机通过丝杆驱动其中一个顶升组件中的滑块沿丝杆长度方向移动,该滑块通过拉杆带动另一个顶升组件中的滑块沿滑杆长度方向同步同向移动。
5、作为优选,所述顶升组件包括第一连杆、第二连杆、第三连杆、第四连杆、安装框架、顶升框架、固定销、止动销、滚动转轴和滑块,所述安装框架的两侧开设有第一腰形孔,所述滑块的两侧设有悬臂销,所述悬臂销滑动连接第一腰形孔,所述第一连杆的一端、第二连杆的一端分别转动连接滑块两侧的悬臂销,所述第一连杆的另一端、第二连杆的另一端分别转动连接固定销的两侧,所述固定销的两侧分别固定连接顶升框架的两侧,所述第三连杆的一端、第四连杆的一端分别转动连接滚动转轴的两侧,所述顶升框架的两侧开设有第二腰形孔,所述滚动转轴的两侧分别滑动连接第二腰形孔,所述第三连杆的另一端、第四连杆的另一端分别转动有止动销,两个所述止动销分别固定连接安装框架的两侧,所述第一连杆的中间位置和第三连杆的中间位置相铰接,所述第二连杆的中间位置和第四连杆的中间位置相铰接。
6、作为优选,所述顶升驱动电机的输出端连接丝杆,所述丝杆位于其中一个所述顶升组件中,且其中一个顶升组件中的滑块螺纹连接丝杆,所述滑杆位于另一个所述顶升组件中,且另一个顶升组件中的滑块滑动连接滑杆。
7、作为优选,所述车头的外侧设有与amr控制器电连接的天线。
8、作为优选,所述车头内设有与amr控制器电连接的语音播放器。
9、本实用新型具有的有益效果:本实用新型中,将两个行走装置分别独立电连接amr控制器,通过调节两个行走装置的移动速度、及与万向轮相配合,使地牛amr能够进行直线移动及转弯;两个顶升装置能够驱动各自相连的叉套进行上下移动,以使托盘及托盘上的货物进行升降,实现装卸拿取。本实用新型中,导航模块和漫反射光电传感器相配合用于感知地牛amr周围的环境,并与amr控制器相配合,使地牛amr集环境感知、动态路径规划、行为控制于一体,定位精度高、自主避障能力强,对场景具有较强的适应力。
技术特征:
1.一种地牛amr,包括车头(1)、位于车头(1)内侧的叉车机构(2)、以及位于车头(1)内的amr控制器(3),其特征在于,所述叉车机构(2)设有两个,呈对称设置,每个所述叉车机构(2)均包括叉腿主梁(4)、及盖设在叉腿主梁(4)上的叉套(5),所述叉腿主梁(4)内设有行走装置(6),两个所述行走装置(6)分别独立电连接amr控制器(3),所述叉腿主梁(4)内还设有顶升装置(7),并通过顶升装置(7)驱动叉套(5)相对于叉腿主梁(4)竖直运动,所述叉腿主梁(4)的前端设有漫反射光电传感器(8),所述车头(1)的顶部设有导航模块(9),所述amr控制器(3)分别与顶升装置(7)、漫反射光电传感器(8)和导航模块(9)电连接,所述车头(1)的底部安装有万向轮(10)。
2.根据权利要求1所述的一种地牛amr,其特征在于,所述行走装置(6)包括行走驱动电机(11)、螺旋伞小齿轮(12)、螺旋伞大齿轮(13)、驱动轮(15)、以及驱动轮轴(14),所述行走驱动电机(11)安装在叉腿主梁(4)的内侧壁上,所述行走驱动电机(11)的输出端连接螺旋伞小齿轮(12),所述驱动轮轴(14)的两端分别转动连接叉腿主梁(4)两侧的内壁,所述驱动轮(15)和螺旋伞大齿轮(13)安装在驱动轮轴(14)上,所述螺旋伞大齿轮(13)啮合螺旋伞小齿轮(12)。
3.根据权利要求1所述的一种地牛amr,其特征在于,所述顶升装置(7)包括拉杆(16)、与拉杆(16)两端相连接的两个顶升组件(17)、滑杆(18)、丝杆(19)、以及顶升驱动电机(20),所述顶升驱动电机(20)通过丝杆(19)驱动其中一个顶升组件(17)中的滑块(30)沿丝杆(19)长度方向移动,该滑块(30)通过拉杆(16)带动另一个顶升组件(17)中的滑块(30)沿滑杆(18)长度方向同步同向移动。
4.根据权利要求3所述的一种地牛amr,其特征在于,所述顶升组件(17)包括第一连杆(21)、第二连杆(22)、第三连杆(23)、第四连杆(24)、安装框架(25)、顶升框架(26)、固定销(27)、止动销(28)、滚动转轴(29)和滑块(30),所述安装框架(25)的两侧开设有第一腰形孔(35),所述滑块(30)的两侧设有悬臂销(34),所述悬臂销(34)滑动连接第一腰形孔(35),所述第一连杆(21)的一端、第二连杆(22)的一端分别转动连接滑块(30)两侧的悬臂销(34),所述第一连杆(21)的另一端、第二连杆(22)的另一端分别转动连接固定销(27)的两侧,所述固定销(27)的两侧分别固定连接顶升框架(26)的两侧,所述第三连杆(23)的一端、第四连杆(24)的一端分别转动连接滚动转轴(29)的两侧,所述顶升框架(26)的两侧开设有第二腰形孔(36),所述滚动转轴(29)的两侧分别滑动连接第二腰形孔(36),所述第三连杆(23)的另一端、第四连杆(24)的另一端分别转动有止动销(28),两个所述止动销(28)分别固定连接安装框架(25)的两侧,所述第一连杆(21)的中间位置和第三连杆(23)的中间位置相铰接,所述第二连杆(22)的中间位置和第四连杆(24)的中间位置相铰接。
5.根据权利要求3所述的一种地牛amr,其特征在于,所述顶升驱动电机(20)的输出端连接丝杆(19),所述丝杆(19)位于其中一个所述顶升组件(17)中,且其中一个顶升组件(17)中的滑块(30)螺纹连接丝杆(19),所述滑杆(18)位于另一个所述顶升组件(17)中,且另一个顶升组件(17)中的滑块(30)滑动连接滑杆(18)。
6.根据权利要求1所述的一种地牛amr,其特征在于,所述车头(1)的外侧设有与amr控制器(3)电连接的天线(31)。
7.根据权利要求1所述的一种地牛amr,其特征在于,所述车头(1)内设有与amr控制器(3)电连接的语音播放器(32)。
技术总结
一种地牛AMR,属于地牛技术领域。本技术包括车头、位于车头内侧的叉车机构、以及位于车头内的AMR控制器,叉车机构设有两个,呈对称设置,每个叉车机构均包括叉腿主梁、及盖设在叉腿主梁上的叉套,叉腿主梁内设有行走装置,两个行走装置分别独立电连接AMR控制器,叉腿主梁内还设有顶升装置,并通过顶升装置驱动叉套相对于叉腿主梁竖直运动,车头的底部安装有万向轮。本技术中,将两个行走装置分别独立电连接AMR控制器,通过调节两个行走装置的移动速度、及与万向轮相配合,使地牛AMR能够进行直线移动及转弯;两个顶升装置能够驱动各自相连的叉套进行上下移动,以使托盘及托盘上的货物进行升降,实现装卸拿取。
技术研发人员:黄夷,孙科,黄易
受保护的技术使用者:嘉兴澳信诚智能科技有限公司
技术研发日:20230706
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!