一种平移式料仓的制作方法
本技术涉及机床加工,更具体地说,特别涉及一种平移式料仓。
背景技术:
1、在自动化行业中,很多精密零件需要储料在料盘中以保证产品的品质,为了实现料盘的自动化上料,现有技术中通常设置有一个上料仓和一个下料仓,以实现不停机的自动化上料。
2、通常机床上下料用的料仓为移动至预定位置后停留,静待机械手将料件取下,而在机械手取料的过程中,完全依靠机械手进行定位取料,因此对机械手的精确控制要求较高,移动料仓难以达到协同配合的效果。
技术实现思路
1、为了解决上述技术问题,本实用新型提供一种平移式料仓,以解决在机械手取料的过程中,完全依靠机械手进行定位取料,因此对机械手的精确控制要求较高,移动料仓难以达到协同配合的效果的问题。
2、本实用新型平移式料仓的目的与功效,由以下具体技术手段所达成:
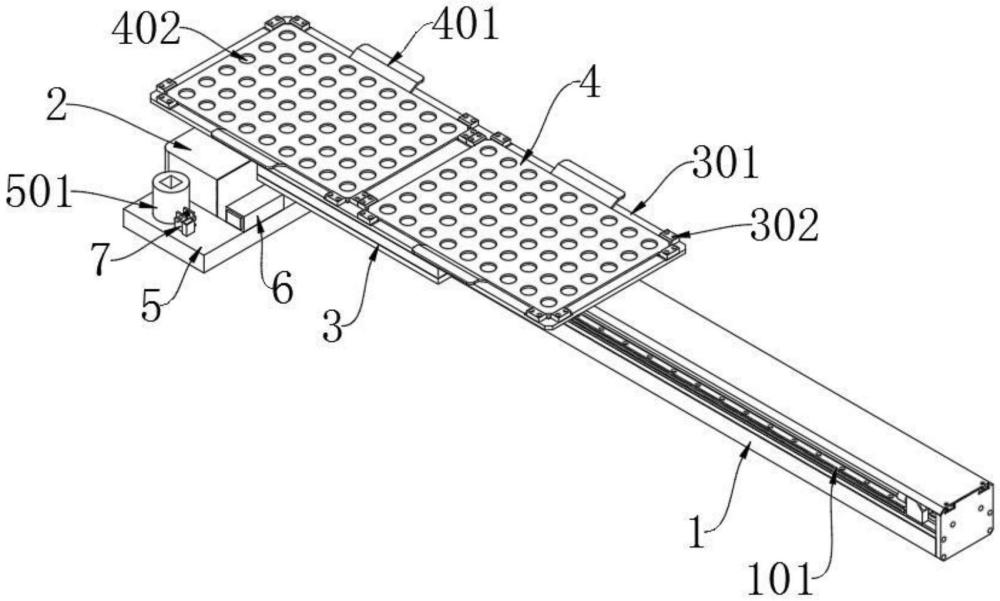
3、一种平移式料仓,包括移动轨座;所述移动轨座的一端固定安装有伺服电机;所述移动轨座上横向滑动安装有移动托盘;所述移动托盘上固定卡装有两个料盘;所述伺服电机一侧的移动轨座上固定安装有l状的关节机器人卡装座;所述关节机器人卡装座顶部平面上靠近移动轨座的位置处固定安装有控制盒;所述关节机器人卡装座顶部平面上靠近外端位置处固定安装有计数限位挡座。
4、进一步的,所述移动轨座上前后开设有贯穿的行程条孔,该处行程条孔的前后两端棱边处固定安装有滑轨,移动托盘的底部则通过滑块滑动安装在滑轨上;所述移动轨座的背部右端和中部靠左处分别固定安装有光电传感器;所述移动轨座内部的右端位置处转动安装有皮带轮,皮带轮与伺服电机之间通过皮带转动相连接。
5、进一步的,所述移动托盘的上端固定安装有托座,托座的顶部平面上左右对称固定安装有两组呈矩形分布的定位卡块,每组定位卡块上分别对应卡装有料盘;所述移动托盘底部的后端垂直向下固定安装有触发板,触发板横向路径经过光电传感器。
6、进一步的,所述料盘的前端棱边处中部和后端棱边处中部分别向上弯折设有张耳;所述料盘上呈矩阵状开设有料胚槽。
7、进一步的,所述关节机器人卡装座顶部平面的前端中部垂直向上转动安装有卡装轴套,卡装轴套中开设有竖向的矩形状插槽;所述卡装轴套环壁的下端位置处横向垂直设有拨杆。
8、进一步的,所述计数限位挡座的右侧固定安装有计数器;所述计数限位挡座的后端设有压块,压块的上端与计数限位挡座的上端之间通过导向杆滑动相连接,导向杆的后端与压块固定相连接,计数限位挡座与压块之间的导向杆上套装有弹簧;所述计数限位挡座后端侧壁上设有计数触发片,计数触发片与计数器电性相连接;所述压块的背部侧壁上横向开设有拨动槽,拨动槽与横向状态的拨杆相适应。
9、与现有技术相比,本实用新型具有如下有益效果:
10、1、本实用新型中计数限位挡座后端侧壁上设有计数触发片,计数触发片与计数器电性相连接;压块的背部侧壁上横向开设有拨动槽,拨动槽与横向状态的拨杆相适应,可通过计数触发片与计数器相配合实现关节机器人取拿毛胚产品次数的记录,当关节机器人取完一排料后,料盘位置往前走一个工件间距的距离,保持待取工件在机械手下方,工件全部取完,料盘返回原位,人工取走成品并放置毛胚,从而实现定准取料,高效协同配合的效果。
11、2、本实用新型中移动轨座内部的右端位置处转动安装有皮带轮,皮带轮与伺服电机之间通过皮带转动相连接,当伺服电机工作时,可通过皮带轮带动移动轨座进行滑移,以便于进行工件的转移加工,并通过光电传感器达到精准定位的目的。
12、本实用新型的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本实用新型的研究和实践而为本领域的技术人员所理解。
技术特征:
1.一种平移式料仓,其特征在于:包括移动轨座(1);所述移动轨座(1)的一端固定安装有伺服电机(2);所述移动轨座(1)上横向滑动安装有移动托盘(3);所述移动托盘(3)上固定卡装有两个料盘(4);所述伺服电机(2)一侧的移动轨座(1)上固定安装有l状的关节机器人卡装座(5);所述关节机器人卡装座(5)顶部平面上靠近移动轨座(1)的位置处固定安装有控制盒(6);所述关节机器人卡装座(5)顶部平面上靠近外端位置处固定安装有计数限位挡座(7)。
2.如权利要求1所述一种平移式料仓,其特征在于:所述移动轨座(1)上前后开设有贯穿的行程条孔,该处行程条孔的前后两端棱边处固定安装有滑轨(101),移动托盘(3)的底部则通过滑块滑动安装在滑轨(101)上;所述移动轨座(1)的背部右端和中部靠左处分别固定安装有光电传感器(102);所述移动轨座(1)内部的右端位置处转动安装有皮带轮(103),皮带轮(103)与伺服电机(2)之间通过皮带(104)转动相连接。
3.如权利要求2所述一种平移式料仓,其特征在于:所述移动托盘(3)的上端固定安装有托座(301),托座(301)的顶部平面上左右对称固定安装有两组呈矩形分布的定位卡块(302),每组定位卡块(302)上分别对应卡装有料盘(4);所述移动托盘(3)底部的后端垂直向下固定安装有触发板(303),触发板(303)横向路径经过光电传感器(102)。
4.如权利要求1所述一种平移式料仓,其特征在于:所述料盘(4)的前端棱边处中部和后端棱边处中部分别向上弯折设有张耳(401);所述料盘(4)上呈矩阵状开设有料胚槽(402)。
5.如权利要求1所述一种平移式料仓,其特征在于:所述关节机器人卡装座(5)顶部平面的前端中部垂直向上转动安装有卡装轴套(501),卡装轴套(501)中开设有竖向的矩形状插槽;所述卡装轴套(501)环壁的下端位置处横向垂直设有拨杆(50101)。
6.如权利要求5所述一种平移式料仓,其特征在于:所述计数限位挡座(7)的右侧固定安装有计数器(701);所述计数限位挡座(7)的后端设有压块(702),压块(702)的上端与计数限位挡座(7)的上端之间通过导向杆(703)滑动相连接,导向杆(703)的后端与压块(702)固定相连接,计数限位挡座(7)与压块(702)之间的导向杆(703)上套装有弹簧(70301);所述计数限位挡座(7)后端侧壁上设有计数触发片(704),计数触发片(704)与计数器(701)电性相连接;所述压块(702)的背部侧壁上横向开设有拨动槽(70201),拨动槽(70201)与横向状态的拨杆(50101)相适应。
技术总结
本技术提供一种平移式料仓,涉及机床加工技术领域,以解决在机械手取料的过程中,完全依靠机械手进行定位取料,因此对机械手的精确控制要求较高,移动料仓难以达到协同配合的效果的问题,包括移动轨座;所述移动轨座的一端固定安装有伺服电机;所述移动轨座上横向滑动安装有移动托盘;所述移动托盘上固定卡装有两个料盘;所述伺服电机一侧的移动轨座上固定安装有L状的关节机器人卡装座;所述关节机器人卡装座顶部平面上靠近移动轨座的位置处固定安装有控制盒;所述关节机器人卡装座顶部平面上靠近外端位置处固定安装有计数限位挡座。本技术实现定准取料,高效协同配合的效果。
技术研发人员:黄晓军,刘浪清,庞建峰,孙精明
受保护的技术使用者:嘉兴布鲁艾诺机器人有限公司
技术研发日:20230711
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!