一种基于AGV运输的罐体加工系统的制作方法
本技术涉及罐体加工装置,尤其涉及一种基于agv运输的罐体加工系统。
背景技术:
1、当前,在大尺寸罐体加工车间内,由于罐体尺寸较大,使得运输和操作不便,从而严重影响加工的效率。随着技术的发展和进步,agv由于其具有的优势,已经普遍应用在多种应用场景中,为了将其应用在罐体加工过程中,解决现有技术对罐体加工效率较低的问题,有必要对现有的agv结构以及其他辅助机构进行改进。
技术实现思路
1、为了提高对罐体加工的效率,本申请的目的在于提供一种基于agv运输的罐体加工系统。
2、为实现本实用新型的目的,本实用新型提供的技术方案如下:
3、一种基于agv运输的罐体加工系统,包括输送agv以及滚轮架机构、左右轨道,所述滚轮架机构在所述左右轨道上移动,所述滚轮架机构为多个,多个滚轮架机构分成两列设置,所述输送agv用于输送罐体至两列滚轮架机构之间所在区域,并将所述罐体放置于多个滚轮架机构之上,所述滚轮架机构用于驱动所述罐体旋转。
4、其中,所述输送agv包括agv车体,所述agv车体上端面设置有安装槽,所述安装槽内安装有顶升平台,所述顶升平台通过安装在安装槽内的动力机构驱动上升或下降,所述顶升平台上安装有用于对罐体进行抱夹的抱夹机构。
5、其中,所述动力机构包括多组顶升液压缸,任一所述顶升液压缸均纵向设置,其底端安装在安装槽内,活塞杆与所述顶升平台连接。
6、其中,所述顶升液压缸为四组,分别安装在顶升平台的四个角上。
7、其中,任一所述顶升液压缸的一侧均分别安装有导向机构,所述导向机构包括导向轴以及导向轴安装座,所述导向轴上端与所述顶升平台连接,下端插入所述导向轴安装座内且滑动连接,所述导向轴安装座安装在安装槽内。
8、其中,所述滚轮架机构包括左右移动轨道轮、u型底支撑架、前后移动架以及滚轮安装架、滚轮、滚轮驱动电机、电动推杆、左右行走驱动电机,其中,所述u型底支撑架下端四个角上分别安装有一个用于在左右轨道上移动的左右移动轨道轮,所述u型底支撑架上设置有左右行走驱动电机,所述左右行走驱动电机驱动左右移动轨道轮在左右轨道上移动;所述u型底支撑架上端两侧设置有两个前后向的导轨,所述前后移动架下端设置有在前后向的导轨内移动的导轨轮机构,每个所述前后向的导轨上端均沿导轨长度方向设置一个电动推杆,所述电动推杆的活塞杆与所述前后移动架连接,用于带动所述前后移动架移动,所述前后移动架上设置有滚轮驱动电机和滚轮安装架,所述滚轮安装架上安装有用于驱动罐体旋转的滚轮,所述滚轮驱动电机驱动所述滚轮旋转。
9、其中,所述前后向的导轨为u型导轨。
10、其中,所述左右行走驱动电机的输出轴设置有第一链轮,所述左右移动轨道轮的轮轴设置有第二链轮,所述第一链轮和第二链轮通过第一链条传动连接。
11、其中,所述滚轮驱动电机的输出轴设置有第三链轮,所述滚轮的轮轴设置有第四链轮,所述第三链轮和第四链轮通过第二链条传动连接。
12、其中,所述导轨轮机构包括结构相同的两根导轨轮杆,每个导轨轮杆的两端均分别转动连接一个导轨轮,相应侧的导轨轮在前后向的导轨内滚动。
13、与现有技术相比,本实用新型的有益效果为:
14、在利用本申请运输时,首先agv车体行驶至罐体放置工位底部,利用动力机构将顶升平台内顶升,从而将罐体举升,举升后利用抱夹机构进行夹紧;
15、滚轮架机构调节其左右及前后的位置,使其能够适应罐体的型号及尺寸;行驶至滚轮架机构区域的时候,行驶至两列滚轮架机构之间,将罐体放置在双向可调式滚轮架机构的滚轮上,通过滚轮驱动罐体旋转,从而对罐体进行加工。
16、本申请能够适用多个型号的罐体加工,通过左右行走驱动电机驱动左右移动轨道轮旋转,在左右轨道上移动,从而调节本机构的横向位置,通过电动推杆驱动前后移动架前后向移动,调节本申请前后向的位置;
17、agv将罐体放置于滚轮架机构上,然后,行驶出放置工位后,动力机构回缩,顶升机构整体落下,将罐体放置于agv车体上端面后,继续行驶。
18、利用本申请大大提高了罐体运输及加工的效率,提高了操作安全性,便于在产业上推广和使用。
技术特征:
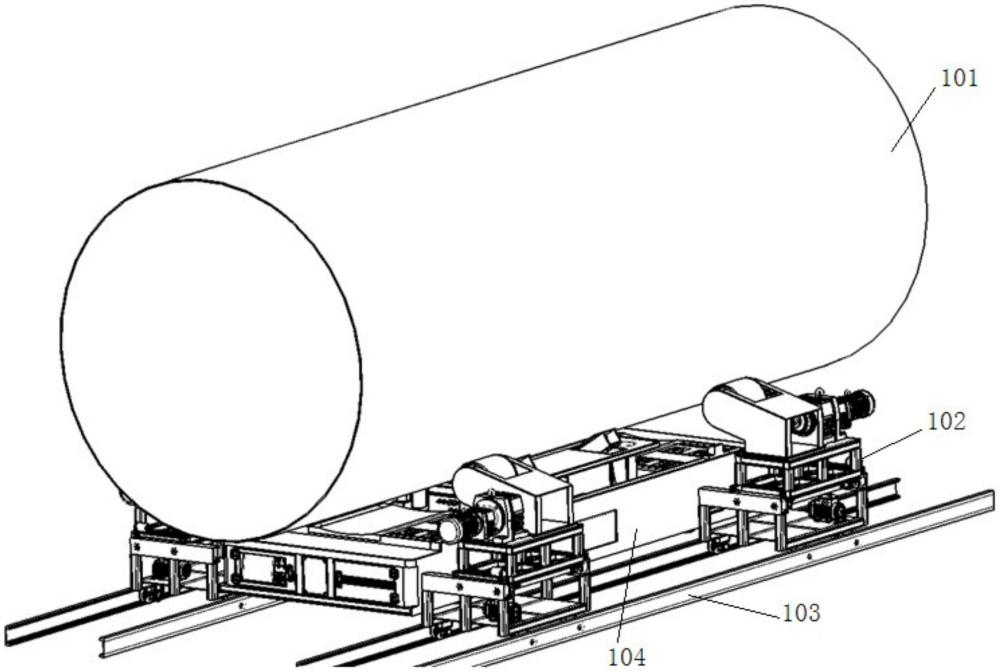
1.一种基于agv运输的罐体加工系统,其特征在于,包括输送agv(104)以及滚轮架机构(102)、左右轨道(103),所述滚轮架机构(102)在所述左右轨道(103)上移动,所述滚轮架机构(102)为多个,多个滚轮架机构(102)分成两列设置,所述输送agv(104)用于输送罐体(101)至两列滚轮架机构(102)之间所在区域,并将所述罐体放置于多个滚轮架机构(102)之上,所述滚轮架机构用于驱动所述罐体旋转。
2.根据权利要求1所述的基于agv运输的罐体加工系统,其特征在于,所述输送agv(104)包括agv车体(201),所述agv车体(201)上端面设置有安装槽,所述安装槽内安装有顶升平台(205),所述顶升平台(205)通过安装在安装槽内的动力机构驱动上升或下降,所述顶升平台(205)上安装有用于对罐体进行抱夹的抱夹机构。
3.根据权利要求2所述的基于agv运输的罐体加工系统,其特征在于,所述动力机构包括多组顶升液压缸(207),任一所述顶升液压缸(207)均纵向设置,其底端安装在安装槽内,活塞杆与所述顶升平台(205)连接。
4.根据权利要求3所述的基于agv运输的罐体加工系统,其特征在于,所述顶升液压缸(207)为四组,分别安装在顶升平台(205)的四个角上。
5.根据权利要求3所述的基于agv运输的罐体加工系统,其特征在于,任一所述顶升液压缸(207)的一侧均分别安装有导向机构(208),所述导向机构(208)包括导向轴以及导向轴安装座,所述导向轴上端与所述顶升平台(205)连接,下端插入所述导向轴安装座内且滑动连接,所述导向轴安装座安装在安装槽内。
6.根据权利要求1所述的基于agv运输的罐体加工系统,其特征在于,所述滚轮架机构(102)包括左右移动轨道轮(1)、u型底支撑架(2)、前后移动架(3)以及滚轮安装架(4)、滚轮(5)、滚轮驱动电机(6)、电动推杆(7)、左右行走驱动电机(9),其中,所述u型底支撑架(2)下端四个角上分别安装有一个用于在左右轨道上移动的左右移动轨道轮(1),所述u型底支撑架(2)上设置有左右行走驱动电机(9),所述左右行走驱动电机(9)驱动左右移动轨道轮(1)在左右轨道上移动;所述u型底支撑架(2)上端两侧设置有两个前后向的导轨,所述前后移动架(3)下端设置有在前后向的导轨内移动的导轨轮机构,每个所述前后向的导轨上端均沿导轨长度方向设置一个电动推杆,所述电动推杆的活塞杆与所述前后移动架(3)连接,用于带动所述前后移动架(3)移动,所述前后移动架(3)上设置有滚轮驱动电机(6)和滚轮安装架(4),所述滚轮安装架(4)上安装有用于驱动罐体旋转的滚轮(5),所述滚轮驱动电机(6)驱动所述滚轮(5)旋转。
7.根据权利要求6所述的基于agv运输的罐体加工系统,其特征在于,所述前后向的导轨为u型导轨。
8.根据权利要求6所述的基于agv运输的罐体加工系统,其特征在于,所述左右行走驱动电机(9)的输出轴设置有第一链轮,所述左右移动轨道轮(1)的轮轴设置有第二链轮,所述第一链轮和第二链轮通过第一链条传动连接。
9.根据权利要求6所述的基于agv运输的罐体加工系统,其特征在于,所述滚轮驱动电机(6)的输出轴设置有第三链轮,所述滚轮的轮轴设置有第四链轮,所述第三链轮和第四链轮通过第二链条传动连接。
10.根据权利要求6所述的基于agv运输的罐体加工系统,其特征在于,所述导轨轮机构包括结构相同的两根导轨轮杆,每个导轨轮杆的两端均分别转动连接一个导轨轮,相应侧的导轨轮在前后向的导轨内滚动。
技术总结
本技术公开了一种基于AGV运输的罐体加工系统,包括输送AGV以及滚轮架机构、左右轨道,所述滚轮架机构在所述左右轨道上移动,所述滚轮架机构为多个,多个滚轮架机构分成两列设置,所述输送AGV用于输送罐体至两列滚轮架机构之间所在区域,并将所述罐体放置于多个滚轮架机构之上,所述滚轮架机构用于驱动所述罐体旋转。在利用本申请运输时,首先AGV车体行驶至罐体放置工位底部,利用动力机构将顶升平台内顶升,从而将罐体举升,举升后利用抱夹机构进行夹紧;将罐体放置后,行驶出放置工位后,动力机构回缩,顶升机构整体落下,将罐体放置于AGV车体上端面后,继续行驶。利用本申请大大提高了罐体运输及加工的效率,提高了操作安全性。
技术研发人员:任志勇,赵金兰,孔亮,张斌鹏
受保护的技术使用者:天津朗誉机器人有限公司
技术研发日:20230714
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!