一种机械爪退瓶机构的制作方法
本技术是一种机械爪退瓶机构,属于机械。
背景技术:
1、针装机是一种用于向密封试管内注入试剂液的装置,它通过注射针来实现液体的精准注入。在科学研究、医学诊断和化学实验等领域,针装机被广泛应用于液体样本的处理、试剂的配制和反应等工序中。
2、针装机通常由注射针和液体控制系统组成。在使用过程中,操作人员将试管放置在针装机上,并设置注入液体的体积和速度等参数。然后,注射针被插入试管的密封盖中,液体根据设定的参数被注入到试管中,完成注射后,拔出注射针。
3、现有的针装机在拔出注射针时,试管通常会受到注射针的摩擦力,导致试管随着注射针的移动而发生不受控制的位移。
技术实现思路
1、针对现有技术存在的不足,本实用新型目的是提供一种机械爪退瓶机构,以解决的现有技术的问题。
2、为了实现上述目的,本实用新型是通过如下的技术方案来实现:
3、一种机械爪退瓶机构,包括:机架;
4、设置在所述机架上的注射组件,所述注射组件包括注射针、以及驱动所述注射针纵向活动的第一驱动组件,所述注射针装置在所述第一驱动组件下方;
5、设置在所述机架上的夹持组件,所述夹持组件包括一组对称设置的夹持柄、以及驱动两个所述夹持柄同步夹、放活动的第二驱动组件;
6、所述夹持柄下方设有夹持部,所述注射针位于两个所述夹持部正中位置,两个所述夹持部之间夹持有封闭试管,所述封闭试管位于所述注射针正下方。
7、还包括控制模块,所述控制模块与第一驱动组件、第二驱动组件电连接。
8、作为进一步改进的,所述注射组件包括固定所述注射针的针架、以及插装在所述机架上的导管,所述导管下方与所述针架顶部固定连接。
9、作为进一步改进的,所述第一驱动组件包括固装在所述机架上的电推杆,所述电推杆下端与针架顶部固定连接。
10、作为进一步改进的,所述第二驱动组件包括电机、安装在所述电机输出端的齿轮,所述机架下方的引导板,所述引导板下方对称设置有一组引导槽,所述夹持柄上端滑动插装在引导槽中,所述夹持柄上方内侧设有齿槽,两个所述夹持柄的齿槽与齿轮相啮合。
11、作为进一步改进的,所述夹持部内侧向内设有v型槽。
12、作为进一步改进的,还包括压力传感器,所述压力传感器安装在所述夹持部内侧,所述压力传感器与控制模块电连接。
13、本实用新型的有益效果是:
14、本实用新型通过设置夹持组件,可在注射之前对封闭试管进行夹紧,再注射针抽出后,再对封闭试管进行释放,具体为:将封闭试管放置于注射针正下方后,通过控制模块输出端朝向第二驱动组件发送夹紧信号,第二驱动组件控制两个夹持柄朝向封闭试管同步靠近,直至对封闭试管进行夹紧,夹紧完成后,通过第二驱动组件输出端反馈夹紧完成的信号至控制模块,完成夹紧步骤;
15、通过控制模块输出端朝向第一控制组件发送下针信号,第一控制组件控制注射针垂直下移,直至针头出液部分插入封闭试管中部,通过第一驱动组件输出端反馈下针完成的信号至控制模块,完成下针步骤;
16、当液体通过注射针完成注射后,控制模块输出端朝向第一控制组件发送收针信号,第一控制组件控制注射针垂直上移,直至针头出液部分拔出封闭试管并复位,通过第一驱动组件输出端反馈收针完成的信号至控制模块,完成收针步骤;
17、通过控制模块输出端朝向第二驱动组件发送释放信号,第二驱动组件控制两个夹持柄远离封闭试管,直至复位,释放完成后,通过第二驱动组件输出端反馈释放完成的信号至控制模块,完成释放步骤。
18、进而针装机在拔出注射针时,令试管可借助夹持组件抵抗注射针拔出时的摩擦力,进而稳定试管的状态。
技术特征:
1.一种机械爪退瓶机构,其特征在于,包括:
2.根据权利要求1所述的一种机械爪退瓶机构,其特征在于:还包括控制模块(5),所述控制模块(5)与第一驱动组件、第二驱动组件电连接。
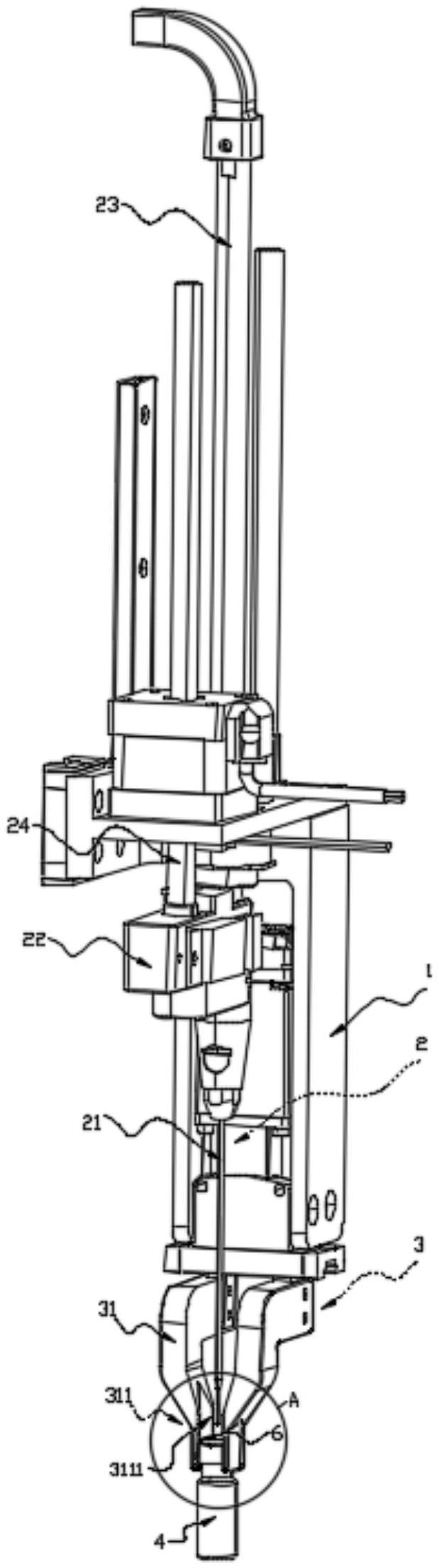
3.根据权利要求1所述的一种机械爪退瓶机构,其特征在于:所述注射组件(2)包括固定所述注射针(21)的针架(22)、以及插装在所述机架(1)上的导管(23),所述导管(23)下方与所述针架(22)顶部固定连接。
4.根据权利要求1所述的一种机械爪退瓶机构,其特征在于:所述第一驱动组件包括固装在所述机架(1)上的电推杆(24),所述电推杆(24)下端与针架(22)顶部固定连接。
5.根据权利要求1所述的一种机械爪退瓶机构,其特征在于:所述第二驱动组件包括电机(32)、安装在所述电机(32)输出端的齿轮(33),所述机架(1)下方的引导板(11),所述引导板(11)下方对称设置有一组引导槽(111),所述夹持柄(31)上端滑动插装在引导槽(111)中,所述夹持柄(31)上方内侧设有齿槽,两个所述夹持柄(31)的齿槽与齿轮(33)相啮合。
6.根据权利要求1所述的一种机械爪退瓶机构,其特征在于:所述夹持部(311)内侧向内设有v型槽(3111)。
7.根据权利要求1所述的一种机械爪退瓶机构,其特征在于:还包括压力传感器(6),所述压力传感器(6)安装在所述夹持部(311)内侧,所述压力传感器(6)与控制模块(5)电连接。
技术总结
本技术公开了一种机械爪退瓶机构,包括:机架;设置在所述机架上的注射组件,所述注射组件包括注射针、以及驱动所述注射针纵向活动的第一驱动组件,所述注射针装置在所述第一驱动组件下方;设置在所述机架上的夹持组件,所述夹持组件包括一组对称设置的夹持柄、以及驱动两个所述夹持柄同步夹、放活动的第二驱动组件;本技术通过设置夹持组件,可在注射之前对封闭试管进行夹紧,再注射针抽出后,再对封闭试管进行释放,进而针装机在拔出注射针时,令试管可借助夹持组件抵抗注射针拔出时的摩擦力,进而稳定试管的状态。
技术研发人员:郑学林,林志伟
受保护的技术使用者:美林美邦(厦门)生物科技有限公司
技术研发日:20230719
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!