一种可灵活转向的板材位移机器人
本技术涉及机器人,具体为一种可灵活转向的板材位移机器人。
背景技术:
1、机器人是指能模仿人的某些活动的一种自动机械,一般能实现行走和操作生产工具等动作,而大理石搬运过程需要进行保护,避免大理石运输过程中粉碎,一般会通过板材位移机器人进行搬运,相比人工搬运,具有工作效率高,工作时间长的优点。
2、现有公告号为cn211333283u的中国专利公开了一种工业机器人的转向装置,包括机器人主体,机器人主体固定安装在底座上,所述底座的底部分别设置有结构相同的支撑移动部和转向移动部,通过设置的支撑移动部和转向移动部,方便工业机器人的移动,其中,转向移动部用于实现工业机器人移动过程中的转向;所述底座的底部具有支撑板,所述支撑板的底面固定安装有支撑座;所述转向移动部包括贯穿拆装式安装在所述支撑座上的安装棱柱。
3、上述方案虽然实现了无需额外工具即可完成拆装的工作,操作便捷,但是由于工作场地都较为平缓,该机器人轮胎较小,导致在拐弯时弧度较大,不便在狭小地方进行转向,使用较为不便,因此不满足现有的需求,对此我们提出了一种可灵活转向的板材位移机器人。
技术实现思路
1、本实用新型的目的在于提供一种可灵活转向的板材位移机器人,以解决上述背景技术中提出的板材位移机器人转向不方便的问题。
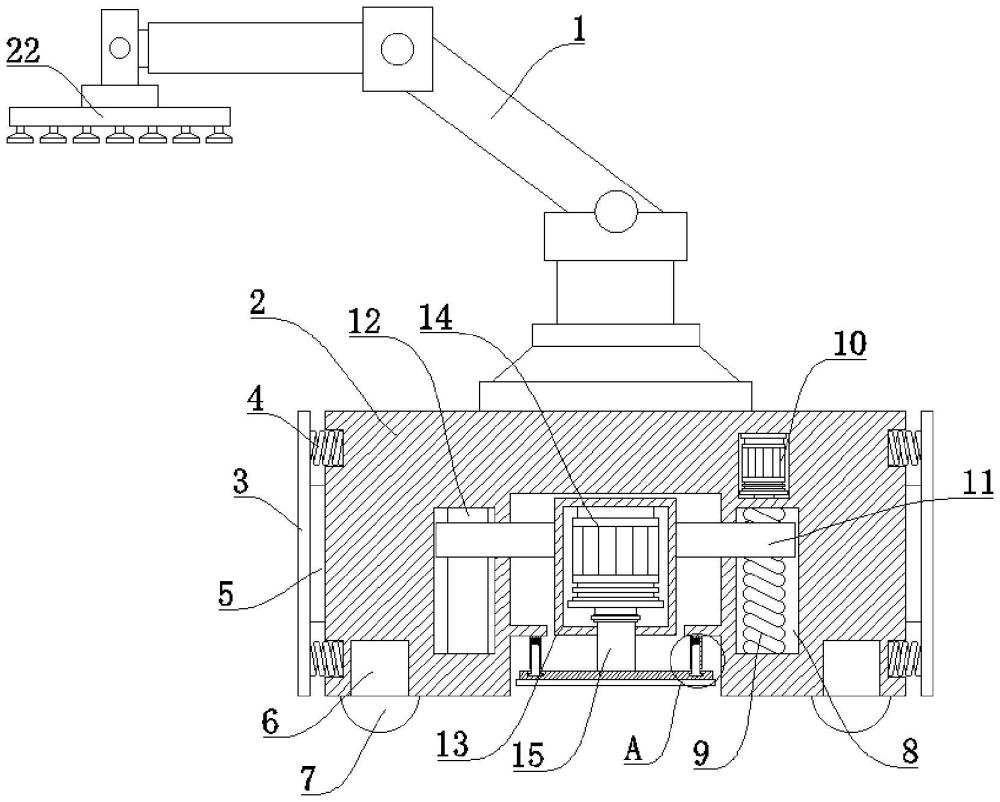
2、为实现上述目的,本实用新型提供如下技术方案:一种可灵活转向的板材位移机器人,包括底座,所述底座的上端安装有机器人,所述机器人的输出端安装有吸盘架,所述底座下端的两侧设置有驱动箱,所述驱动箱的前后端均安装有滚轮;
3、还包括传动腔,其开设在所述底座内部的两侧,其中一个所述传动腔的内部转动连接有螺纹杆,所述底座的下方设置有固定箱,所述固定箱两侧的上端均焊接有升降板,所述升降板的一端均延伸至传动腔的内部,且升降板均与传动腔滑动配合,所述螺纹杆贯穿其中一个升降板,且螺纹杆与升降板螺纹连接;
4、还包括支撑块,其设置在所述固定箱的下方,所述支撑块上端的中间位置处焊接有支撑轴,所述支撑块的上端开设有环形滑槽,所述环形滑槽的内部设置有四个呈环形等距分布的t型滑块,所述t型滑块的一端均延伸至环形滑槽的外部,且t型滑块均与环形滑槽滑动配合。
5、优选的,所述螺纹杆的上方设置有第一伺服电机,且第一伺服电机的输出端均与螺纹杆通过联轴器传动连接。
6、优选的,所述固定箱的内部设置有第二伺服电机,且第二伺服电机的输出端与支撑轴通过联轴器传动连接。
7、优选的,其中一个所述传动腔的内部焊接有限位杆,所述限位杆贯穿其中一个升降板,且限位杆与升降板滑动配合。
8、优选的,所述固定箱的下方设置有四个呈环形等距分布的滑筒,且滑筒均与底座固定连接,所述t型滑块位于环形滑槽外部的一端均延伸至滑筒的内部,且t型滑块均与滑筒滑动配合,所述t型滑块与滑筒之间均通过第二缓冲弹簧相连接。
9、优选的,所述底座的两侧均设置有防护板,所述底座两侧的四角处均设置有第一缓冲弹簧,且第一缓冲弹簧均与防护板相连接,所述防护板一侧的中间位置处均粘连固定有缓冲海绵块,且缓冲海绵块均与底座粘连固定。
10、优选的,所述支撑块的下端粘连固定有耐磨橡胶。
11、与现有技术相比,本实用新型的有益效果是:
12、1.本实用新型通过在底座内部的两侧开设有传动腔,通过转动其中一个传动腔内螺纹杆可以使升降板上下的移动,而升降板可以带动固定箱同步的移动,进而可以使固定箱下方的支撑块与地面接触,支撑起底座,再通过启动第二伺服电机可以使底座进行转动,进而可以在狭小的地方灵活的转向,实用性好。
13、2.本实用新型通过在底座的两侧设置有防护板,当机器人移动时通过防护板可以对下方的底座进行防护,受到撞击时通过第一缓冲弹簧可以进行缓冲保护,而缓冲海绵块不仅可以启动一定的缓冲效果,还可以避免防护板直接接触底座,避免二者碰撞产生的磨损,提高了底座的使用寿命,便于日常的移动。
14、3.本实用新型通过在固定箱的下方设置有四个呈环形等距分布的滑筒,当支撑块进行支撑转动时,通过第二缓冲弹簧的挤压可以使滑筒内的t型滑块可以挤压支撑块的上端,进而可以增加支撑连接块的牢固度,增加了稳定性,使用方便。
技术特征:
1.一种可灵活转向的板材位移机器人,包括底座(2),所述底座(2)的上端安装有机器人(1),所述机器人(1)的输出端安装有吸盘架(22),所述底座(2)下端的两侧设置有驱动箱(6),所述驱动箱(6)的前后端均安装有滚轮(7),其特征在于:
2.根据权利要求1所述的一种可灵活转向的板材位移机器人,其特征在于:所述螺纹杆(9)的上方设置有第一伺服电机(10),且第一伺服电机(10)的输出端均与螺纹杆(9)通过联轴器传动连接。
3.根据权利要求1所述的一种可灵活转向的板材位移机器人,其特征在于:所述固定箱(13)的内部设置有第二伺服电机(14),且第二伺服电机(14)的输出端与支撑轴(15)通过联轴器传动连接。
4.根据权利要求1所述的一种可灵活转向的板材位移机器人,其特征在于:其中一个所述传动腔(8)的内部焊接有限位杆(12),所述限位杆(12)贯穿其中一个升降板(11),且限位杆(12)与升降板(11)滑动配合。
5.根据权利要求1所述的一种可灵活转向的板材位移机器人,其特征在于:所述固定箱(13)的下方设置有四个呈环形等距分布的滑筒(16),且滑筒(16)均与底座(2)固定连接,所述t型滑块(17)位于环形滑槽(20)外部的一端均延伸至滑筒(16)的内部,且t型滑块(17)均与滑筒(16)滑动配合,所述t型滑块(17)与滑筒(16)之间均通过第二缓冲弹簧(18)相连接。
6.根据权利要求1所述的一种可灵活转向的板材位移机器人,其特征在于:所述底座(2)的两侧均设置有防护板(3),所述底座(2)两侧的四角处均设置有第一缓冲弹簧(4),且第一缓冲弹簧(4)均与防护板(3)相连接,所述防护板(3)一侧的中间位置处均粘连固定有缓冲海绵块(5),且缓冲海绵块(5)均与底座(2)粘连固定。
7.根据权利要求1所述的一种可灵活转向的板材位移机器人,其特征在于:所述支撑块(19)的下端粘连固定有耐磨橡胶(21)。
技术总结
本技术公开了一种可灵活转向的板材位移机器人,包括底座,所述底座的上端安装有机器人,所述机器人的输出端安装有吸盘架,所述底座下端的两侧设置有驱动箱,所述驱动箱的前后端均安装有滚轮,还包括传动腔,其开设在所述底座内部的两侧,其中一个所述传动腔的内部转动连接有螺纹杆,所述底座的下方设置有固定箱,所述固定箱两侧的上端均焊接有升降板,所述升降板的一端均延伸至传动腔的内部,且升降板均与传动腔滑动配合,所述螺纹杆贯穿其中一个升降板,且螺纹杆与升降板螺纹连接。该可灵活转向的板材位移机器人可以在狭小的地方灵活的转向,实用性好。
技术研发人员:翁伟,林凤功,刘思默,何建华,尤燕玲,宋海霞,佟一璇
受保护的技术使用者:福建信息职业技术学院
技术研发日:20230720
技术公布日:2024/2/25
- 还没有人留言评论。精彩留言会获得点赞!