一种全自动智能抓取行车系统的制作方法
本技术涉及一种行车系统,尤其是涉及一种全自动智能抓取行车系统。
背景技术:
1、公知的,延迟焦化设备已经实现远程一键智能除焦,极大的改善了操作人员的工作环境并极大降低了操作人员的劳动强度;但在除焦过程中焦炭的抓取,运输环节,仍然需要依靠操作工的工作经验,在焦炭堆集的焦池目视范围内,人工操作焦炭抓取行车,对焦池中的焦炭进行抓取、转移、堆集、脱水、装卸,此种操作模式,不仅工作环境恶劣,而且生产效率较低,并且由于操作人员所处环境因而存在一定的安全隐患;同时,焦炭的露天除焦,露天堆放,不可避免的造成焦炭伴生的有毒有害气体和焦碳粉尘的环境污染。为了解决除焦过程中的环境污染,而对延迟焦化工艺的环保改进,对焦炭处理的抓取行车系统提出了更高的要求。
技术实现思路
1、为了克服背景技术中的不足,本实用新型公开了一种全自动智能抓取行车系统。
2、为了实现所述发明目的,本实用新型采用如下技术方案:
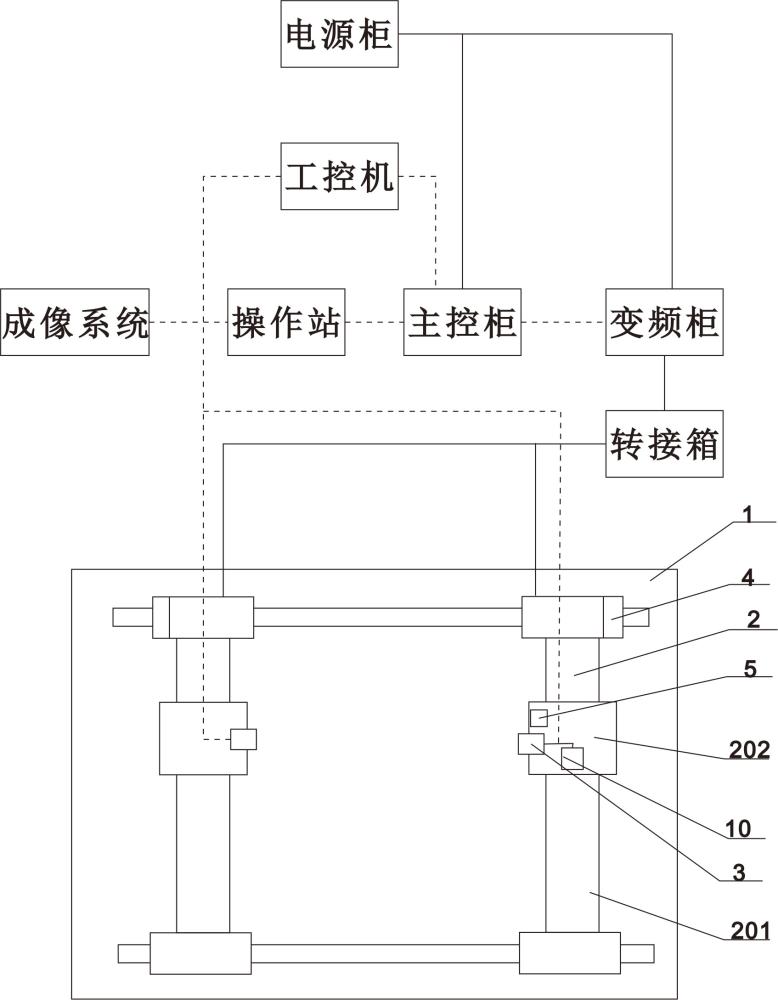
3、一种全自动智能抓取行车系统,包括主控柜、变频柜、操作站、行车和抓斗,变频柜和操作站分别与主控柜通过工业以太网连接,变频柜输出的电机电源线通过转接箱、柔性移动电缆与行车连接;所述行车设置在焦池的上部,行车包括沿焦池长度方向轨迹上行走的大车和沿大车长度方向轨迹上行走的小车,在大车和小车的移动轨迹上分别设有大车绝对值线性编码器和小车绝对值线性编码器,在小车的几何中心位置设有uwb高精度定位系统,连接在小车底部抓斗提升绳的位置处固定有抓斗称重传感器,抓斗的输入端与抓斗提升电机的输出轴固定连接,在提升电机的输出轴上固定有增量编码器。
4、所述的全自动智能抓取行车系统,还包括固定在大车上的可见光红外成像一体化摄像系统,可见光红外成像一体化摄像系统包括防爆可见光红外成像一体化摄像机、视频监视器和硬盘录像机。
5、所述的全自动智能抓取行车系统,还包括设置在小车底部的成像系统,成像系统包括3d激光成像系统和微波雷达扫描成像系统,3d激光成像系统和微波雷达扫描成像系统均通过profinet通信电缆与工控机连接,工控机与主控柜内的plc控制器通过profinet通信电缆连接。
6、所述的全自动智能抓取行车系统,绝对值线性编码器和小车绝对值线性编码器与主控柜内的plc控制器通过profinet通信电缆连接。
7、所述的全自动智能抓取行车系统,所述的增量编码器、抓斗称重传感器、uwb高精度定位系统均通过profinet通信电缆与主控柜内的plc控制器连接。
8、由于采用了上述技术方案,本实用新型具有如下有益效果:
9、本实用新型所述的全自动智能抓取行车系统,通过uwb-tdoa超宽度实时高精度3d空间定位系统10的大小车空间定位标签提供二者在xy轴上的高精度定位,而将其定位数据进行解析获得大车和小车的定位数据,将定位数据与大车、小车绝对值线性编码器的定位数据融合,再配合大车、小车绝对值线性编码器位置的校准传感器,可以最大限度的提升大小车定位精度,并进一步提高行车实时高精度定位系统的可靠性;通过成像系统获取现场焦池内的位置信息,并传递给操作台中的工控机,工控机向主控柜内的plc控制器发出工作指令;本实用新型结构简单、操作方便,避免了人工操作抓取行车带来的安全隐患,实现了全自动智能操作,提高了生产效率。
技术特征:
1.一种全自动智能抓取行车系统,包括主控柜、变频柜、操作站、行车和抓斗,其特征是:变频柜和操作站分别与主控柜通过工业以太网连接,变频柜输出的电机电源线通过转接箱、柔性移动电缆与行车连接;所述行车设置在焦池的上部,行车包括沿焦池长度方向轨迹上行走的大车和沿大车长度方向轨迹上行走的小车,在大车和小车的移动轨迹上分别设有大车绝对值线性编码器和小车绝对值线性编码器,在小车的几何中心位置设有uwb高精度定位系统,连接在小车底部抓斗提升绳的位置处固定有抓斗称重传感器,抓斗的输入端与抓斗提升电机的输出轴固定连接,在提升电机的输出轴上固定有增量编码器。
2.根据权利要求1所述的全自动智能抓取行车系统,其特征是:还包括固定在大车上的可见光红外成像一体化摄像系统,可见光红外成像一体化摄像系统包括防爆可见光红外成像一体化摄像机、视频监视器和硬盘录像机。
3.根据权利要求1所述的全自动智能抓取行车系统,其特征是:还包括设置在小车底部的成像系统,成像系统包括3d激光成像系统和微波雷达扫描成像系统,3d激光成像系统和微波雷达扫描成像系统均通过profinet通信电缆与工控机连接,工控机与主控柜内的plc控制器通过profinet通信电缆连接。
4.根据权利要求1所述的全自动智能抓取行车系统,其特征是:绝对值线性编码器和小车绝对值线性编码器与主控柜内的plc控制器通过profinet通信电缆连接。
5.根据权利要求1所述的全自动智能抓取行车系统,其特征是:所述的增量编码器、抓斗称重传感器、uwb高精度定位系统均通过profinet通信电缆与主控柜内的plc控制器连接。
技术总结
一种全自动智能抓取行车系统,涉及一种行车系统,包括主控柜、变频柜、操作站、行车和抓斗,变频柜和操作站分别与主控柜通过工业以太网连接,变频柜输出的电机电源线通过转接箱、柔性移动电缆与行车连接;焦池上部的行车包括沿焦池长度方向轨迹上行走的大车和沿大车长度方向轨迹上行走的小车,在大车和小车的移动轨迹上分别设有大车绝对值线性编码器和小车绝对值线性编码器,在小车的几何中心位置设有UWB高精度定位系统,连接在小车底部抓斗提升绳的位置处固定有抓斗称重传感器;本技术结构简单、操作方便,避免了人工操作抓取行车带来的安全隐患,实现了全自动智能操作,提高了生产效率。
技术研发人员:吴拥军
受保护的技术使用者:洛阳市石化配件制造有限公司
技术研发日:20230728
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!