智能打包系统的制作方法
本技术涉及打包设备,尤其是一种智能打包系统。
背景技术:
1、废金属打包机主要应用于回收加工行业及金属冶炼行业,可将各种废金属料挤压成长方体、圆柱体等各种形状的合格炉料,便于储藏、运输及回炉再利用。
2、中国实用新型专利cn215514368u公开了一种全智能化无人操作打包机,在废料堆放区与压块堆放区形成的矩形区域的四角处分别设有一个成像感应装置,根据成像感应装置拍到的废料堆放区与压块堆放区的情况提前设置好程序,自动完成逐步将废料堆放区的废料逐渐通过抓手抓取后送至打包机压块,并在打包机压块后通过抓手抓取后堆码至压块堆放区。这种打包机需要在废料堆放区及压块堆放区的外角处均需要设置成像感应装置,所需成像感应装置较多,安装较麻烦,成本较高。
3、现有的打包机的液压油路,在不同方向管路交接的部位,常规的方式是采用弯头与管子焊接转子,由于打包机为大型设备,其液压油路所需的管子管径大、管长较长、管子重量重,焊接安装难度较大,安装成本高,而且焊接后容易在管内残留焊渣,不易清理,焊渣残留在管内会跟随油液流动,有可能会对管路造成堵塞。
技术实现思路
1、本申请人针对上述现有智能打包机存在的缺点,提供一种结构合理的智能打包系统,采用雷达感应,减少感应元件,便于安装,降低成本;在管路交接部位采用油路块连接,降低安装难度,防止管内存在残留焊渣。
2、本实用新型所采用的技术方案如下:
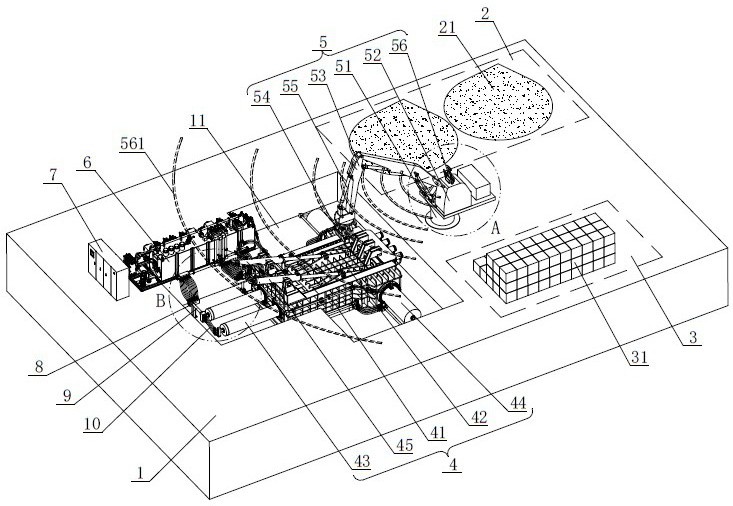
3、一种智能打包系统,工作场地上设置有废料区、包块区、打包机、抓钢机,抓钢机位于废料区与包块区之间,打包机位于抓钢机一侧;抓钢机的底座上设置驾校台,驾校台可以绕底座内部的转轴旋转,驾校台通过抓臂组件连接有抓斗,抓臂组件上设置若干抓臂油缸,驾校台上设置有雷达,雷达的电磁波信号可以同时对废料区、包块区及打包机进行探测。
4、作为上述技术方案的进一步改进:
5、工作场地上还设置有液压系统与控制柜,打包机通过管路与液压系统连接,打包机、抓钢机、液压系统分别通过线路与控制柜连接。
6、打包机的料仓上设置有门盖,料仓一端设置有推料油缸,料仓另一端相对的两侧分别设置有侧压油缸,门盖上设置有门盖油缸;推料油缸、侧压油缸、门盖油缸的进出油路分别通过油路块连接到管路上。
7、相邻油路块之间通过管路或油管连通。
8、油路块与管路或油管之间分别通过紧固件锁紧固定。
9、油路块与管路之间通过焊接固定。
10、油路块的块体内开设有主通道,块体上开设有若干油管接孔及至少一个管路接口或油管接孔,油管接孔、管路接口、油管接孔连通主通道。
11、主通道为盲孔,其开口端为管路接口。
12、油管接孔、和/或管路接口、和/或油管接孔外周开设有若干连接孔。
13、工作场地上设有凹坑,打包机设置在凹坑内。
14、本实用新型的有益效果如下:
15、本实用新型通过雷达同时实现对废料区、包块区及打包机的空间位置进行探测,减少了感应元件,雷达设置在驾校台上,安装更方便,安装难度小,降低了成本。
16、本实用新型的在管路的交接部位通过油路块连接,体积小、重量小,安装难度小,安装成本低;油路块与管路或油管之间分别通过紧固件锁紧,避免了焊渣的产生,保证了油路的通畅;在油路块与管路采用焊接方式固定时,由于油路块较小,焊接产生的焊渣可以很容易清理干净,避免了焊渣残留在油路块或管路内而影响油液的流动,保证了油路的通畅。
技术特征:
1.一种智能打包系统,其特征在于:工作场地(1)上设置有废料区(2)、包块区(3)、打包机(4)、抓钢机(5),抓钢机(5)位于废料区(2)与包块区(3)之间,打包机(4)位于抓钢机(5)一侧;抓钢机(5)的底座(51)上设置驾校台(52),驾校台(52)可以绕底座(51)内部的转轴旋转,驾校台(52)通过抓臂组件(53)连接有抓斗(54),抓臂组件(53)上设置若干抓臂油缸(55),驾校台(52)上设置有雷达(56),雷达(56)的电磁波(561)信号可以同时对废料区(2)、包块区(3)及打包机(4)进行探测。
2.按照权利要求1所述的智能打包系统,其特征在于:工作场地(1)上还设置有液压系统(6)与控制柜(7),打包机(4)通过管路(9)与液压系统(6)连接,打包机(4)、抓钢机(5)、液压系统(6)分别通过线路与控制柜(7)连接。
3.按照权利要求1所述的智能打包系统,其特征在于:打包机(4)的料仓(41)上设置有门盖(42),料仓(41)一端设置有推料油缸(43),料仓(41)另一端相对的两侧分别设置有侧压油缸(44),门盖(42)上设置有门盖油缸(45);推料油缸(43)、侧压油缸(44)、门盖油缸(45)的进出油路分别通过油路块(8)连接到管路(9)上。
4.按照权利要求3所述的智能打包系统,其特征在于:相邻油路块(8)之间通过管路(9)或油管(10)连通。
5.按照权利要求4所述的智能打包系统,其特征在于:油路块(8)与管路(9)或油管(10)之间分别通过紧固件锁紧固定。
6.按照权利要求4所述的智能打包系统,其特征在于:油路块(8)与管路(9)之间通过焊接固定。
7.按照权利要求3所述的智能打包系统,其特征在于:油路块(8)的块体(81)内开设有主通道(82),块体(81)上开设有若干油管接孔及至少一个管路接口或油管接孔,油管接孔、管路接口、油管接孔连通主通道(82)。
8.按照权利要求7所述的智能打包系统,其特征在于:主通道(82)为盲孔,其开口端为管路接口。
9.按照权利要求7所述的智能打包系统,其特征在于:油管接孔、和/或管路接口、和/或油管接孔外周开设有若干连接孔(87)。
10.按照权利要求1所述的智能打包系统,其特征在于:工作场地(1)上设有凹坑(11),打包机(4)设置在凹坑(11)内。
技术总结
本技术公开了一种智能打包系统,工作场地上设置有废料区、包块区、打包机、抓钢机,抓钢机位于废料区与包块区之间,打包机位于抓钢机一侧;抓钢机的底座上设置驾校台,驾校台可以绕底座内部的转轴旋转,驾校台通过抓臂组件连接有抓斗,抓臂组件上设置若干抓臂油缸,驾校台上设置有雷达。本技术通过雷达同时实现对废料区、包块区及打包机的空间位置进行探测,减少了感应元件,雷达设置在驾校台上,安装更方便,安装难度小,降低了成本。
技术研发人员:周涛,周鹏,颜晓宇
受保护的技术使用者:江苏大隆凯科技有限公司
技术研发日:20230731
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!