一种船用起重机械手夹手的制作方法
本技术涉及机械手,具体为一种船用起重机械手夹手。
背景技术:
1、船舶上一般需要配备起重机,现有的船舶通常采用龙门式起重机或塔吊式起重机,为了节约起重设备占地面积,市面上出现了一种船用起重机械手,但是目前市面上大多数的船用起重机械手通过驱动伸缩杆旋转带动夹手旋转,操控夹手对准管料时需要调整伸缩杆位置,调整距离较远,导致操控夹手对准的难度较大,旋转力臂较长,导致能耗较高。
技术实现思路
1、本实用新型的目的在于提供一种船用起重机械手夹手,以解决上述背景技术中提出的问题。
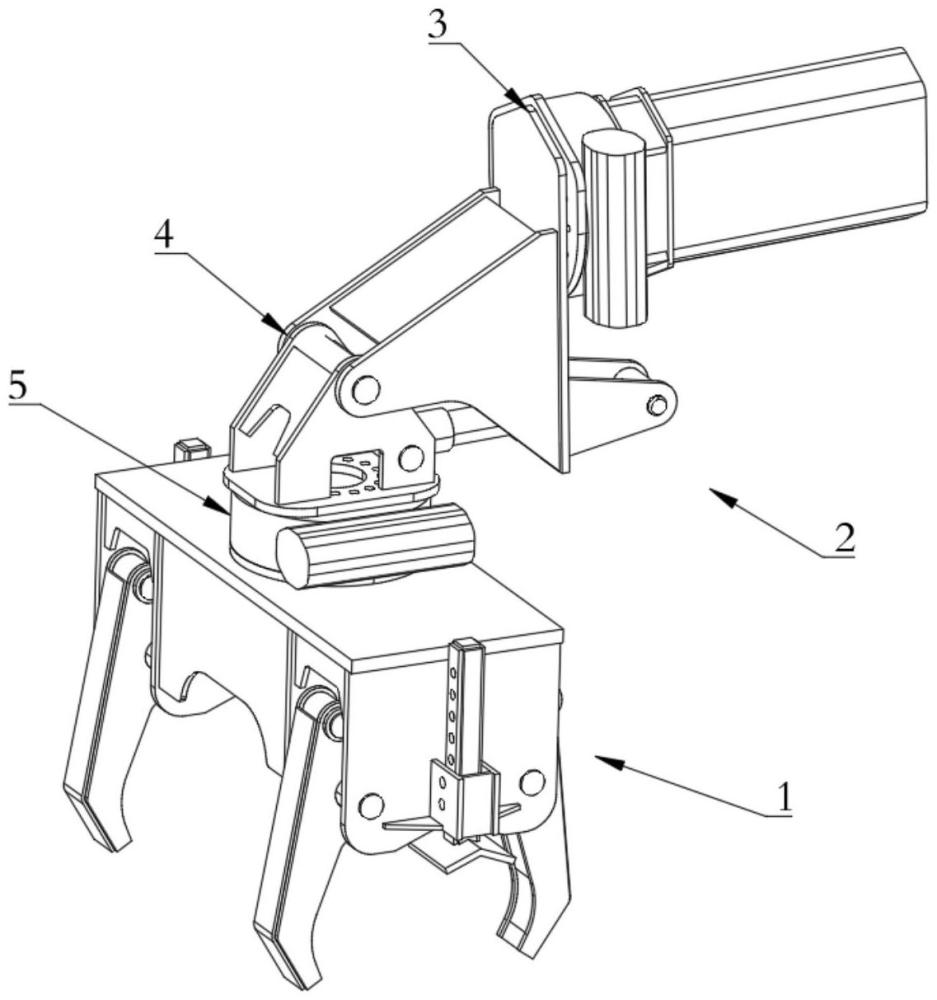
2、为实现上述目的,本实用新型提供如下技术方案:一种船用起重机械手夹手,包括夹手机构和旋转机构,旋转机构包括第一旋转装置、第二旋转装置和第三旋转装置,第一旋转装置包括第一驱动器和旋转基板,旋转基板与第一驱动器的旋转端连接,第一驱动器驱动旋转基板旋转,第二旋转装置包括第二驱动器、固定架和旋转架,固定架的一端固定安装在旋转基板的另一端,旋转架的一端与固定架的另一端可旋转的连接,第二驱动器的伸缩端与旋转架可旋转的连接,第二驱动器驱动旋转架旋转,第三旋转装置与旋转架的另一端固定连接,第三旋转装置的旋转端与夹手机构连接,第三旋转装置驱动夹手机构旋转。
3、作为优选,旋转基板的另一端设置有连接架,连接架上设置有第一连接杆,第二驱动器的固定端设置有第一连接套,第一连接套可旋转的安装在第一连接杆上。
4、作为优选,旋转架的另一端设置有第二连接杆,第二驱动器的伸缩端端设置有第二连接套,第二连接套可旋转的安装在第二连接杆上。
5、作为优选,旋转基板的另一端还设置有u形槽,u形槽与第二驱动器配合。
6、作为优选,夹手机构包括架体、第三驱动装置和若干个夹爪,架体与第三旋转装置的旋转端连接,夹爪可旋转的安装在架体上,第三驱动装置驱动夹爪旋转。
7、作为优选,架体上还设置有若干个锁紧杆,锁紧杆可升降的设置在架体侧端。
8、与现有技术相比,本实用新型的有益效果是:
9、第一驱动器驱动旋转基板沿y轴旋转,旋转基板带动第二旋转装置、第三旋转装置和夹手机构沿y轴旋转,第二驱动器驱动旋转架沿x轴旋转,旋转架带动第三旋转装置沿x轴旋转,第三旋转装置带动夹手机构沿z轴旋转,工作时,机械手带动旋转机构和夹手机构移动到管料上方,旋转机构带动夹手机构旋转至对准管料,夹手机构夹紧管料,机械手带动管料移动至指定地点以完成搬运,使用旋转机构调整夹手机构位置,调整距离较短,降低操控夹手对准的难度,旋转力臂较短,减少能耗。
技术特征:
1.一种船用起重机械手夹手,包括,夹手机构(1)和旋转机构(2),其特征在于:所述旋转机构(2)包括第一旋转装置(3)、第二旋转装置(4)和第三旋转装置(5),第一旋转装置(3)包括第一驱动器(301)和旋转基板(302),旋转基板(302)与第一驱动器(301)的旋转端连接,第一驱动器(301)驱动旋转基板(302)旋转,第二旋转装置(4)包括第二驱动器(405)401、固定架(402)和旋转架(403),固定架(402)的一端固定安装在旋转基板(302)的另一端,旋转架(403)的一端与固定架(402)的另一端可旋转的连接,第二驱动器(405)401的伸缩端与旋转架(403)可旋转的连接,第二驱动器(405)401驱动旋转架(403)旋转,第三旋转装置(5)与旋转架(403)的另一端固定连接,第三旋转装置(5)的旋转端与夹手机构(1)连接,第三旋转装置(5)驱动夹手机构(1)旋转。
2.根据权利要求1所述的一种船用起重机械手夹手,其特征在于:所述旋转基板(302)的另一端设置有连接架(303),连接架(303)上设置有第一连接杆(304),第二驱动器(405)401的固定端设置有第一连接套(404),第一连接套(404)可旋转的安装在第一连接杆(304)上。
3.根据权利要求2所述的一种船用起重机械手夹手,其特征在于:所述旋转架(403)的另一端设置有第二连接杆,第二驱动器(405)401的伸缩端端设置有第二连接套(406),第二连接套(406)可旋转的安装在第二连接杆上。
4.根据权利要求3所述的一种船用起重机械手夹手,其特征在于:所述旋转基板(302)的另一端还设置有u形槽(305),u形槽(305)与第二驱动器(405)401配合。
5.根据权利要求4所述的一种船用起重机械手夹手,其特征在于:所述夹手机构(1)包括架体(101)、第三驱动装置(102)和若干个夹爪(103),架体(101)与第三旋转装置(5)的旋转端连接,夹爪(103)可旋转的安装在架体(101)上,第三驱动装置(102)驱动夹爪(103)旋转。
6.根据权利要求5所述的一种船用起重机械手夹手,其特征在于:所述架体(101)上还设置有若干个锁紧杆(104),锁紧杆(104)可升降的设置在架体(101)侧端。
技术总结
本技术公开了一种船用起重机械手夹手,包括夹手机构和旋转机构,旋转机构包括第一旋转装置、第二旋转装置和第三旋转装置,第一旋转装置包括第一驱动器和旋转基板,第二旋转装置包括第二驱动器、固定架和旋转架,使用旋转机构调整夹手机构位置,调整距离较短,降低操控夹手对准的难度,旋转力臂较短,减少能耗。
技术研发人员:许欣欣,李雪,张彦春
受保护的技术使用者:中佑勘察设计有限公司
技术研发日:20230803
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!