一种输送搬运机器人
本技术涉及机器人搬运,尤其涉及一种输送搬运机器人。
背景技术:
1、在机械自动化生产线运输领域的普及应用中,机械手作为一种模仿人类手臂操作的自动化生产工具,以其在传送搬运、高效任务完成等方面的优越性能,成为自动化领域中不可或缺的组成部分。
2、然而,在目前已有的工件运输装置中,尤其是单臂运输装置,高速运输时常常出现结构不稳定的问题。这类问题往往源于机械手自身的惯性特性或者机构的非对称性,直接影响了工件自动化传输的效率。
3、因此,急需研发一种在运转时能保持结构稳定,具有较强灵活性的输送搬运机器人。
技术实现思路
1、本实用新型克服了现有技术的不足,提供一种输送搬运机器人,结构简单且灵活性强,能在运转时保持结构稳定,提高传送运输效率。
2、为达到上述目的,本实用新型采用的技术方案为:一种输送搬运机器人,包括:设置在机架上的y轴位移机构和z轴位移机构,所述y轴位移机构上驱动连接的第一滑块和所述z轴位移机构上驱动连接的第二滑块之间驱动连接有偏置曲柄滑块机构;所述偏置曲柄滑块机构的第二连杆的一端与所述第二滑块驱动连接,所述第二连杆的另一端与摆臂的一端枢转连接,所述摆臂的另一端驱动连接有端拾器;且所述摆臂的一侧与所述第一滑块滑动衔接。
3、本实用新型一个较佳方案中,y轴位移机构包括设置在所述机架的侧面上的第一伺服电机以及与第一伺服电机驱动连接且横向设置的第一行星滚柱丝杠,所述第一行星滚柱丝杠上驱动设置有所述第一滑块。
4、本实用新型一个较佳方案中,第一滑块上设置有枢转轴承组件,所述枢转轴承组件的固定板与所述第一滑块固定安装,所述枢转轴承组件的滑动板滑动限定在所述摆臂的位移衔接部上,且所述固定板与所述滑动板通过枢转轴枢转衔接。
5、本实用新型一个较佳方案中,z轴位移机构包括竖立设置在所述机架上的第二行星滚柱丝杠,以及与所述第二行星滚柱丝杠驱动连接的第三伺服电机,所述第二行星滚柱丝杠上驱动连接有所述第二滑块。
6、本实用新型一个较佳方案中,第二滑块的一端套设旋接在所述第二行星滚柱丝杠上,所述第二滑块的另一端上驱动设置有第二伺服电机,所述第二伺服电机与所述第二连杆驱动连接。
7、本实用新型一个较佳方案中,摆臂的一端设置有向外凸出的衔接凸件,所述衔接凸件与所述第二连杆枢转连接;所述衔接凸件和所述端拾器分别位于设置所述摆臂的两端且位于所述摆臂的相对侧。
8、本实用新型一个较佳方案中,端拾器通过第一连杆枢转连接在所述摆臂的端部;
9、所述第一连杆的一端通过第四伺服电机以及减速器与所述摆臂的端部驱动连接;
10、所述第一连杆的另一端通过第五伺服电机以及第三连杆与所述端拾器的连接端驱动连接。
11、本实用新型一个较佳方案中,位移衔接部包括滑槽或滑轨。
12、本实用新型一个较佳方案中,y轴位移机构的位移轨迹和z轴位移机构的位移轨迹相互交叉。
13、本实用新型一个较佳方案中,y轴位移机构的位移轨迹和所述z轴位移机构的位移轨迹相互垂直。
14、本实用新型解决了背景技术中存在的缺陷:
15、本实用新型公开的一种输送搬运机器人用于实现端拾器对工件的运输,且本实用新型的输送搬运机器人结构灵活性强,运输工件动作稳定,能够提高运输的效率。
技术特征:
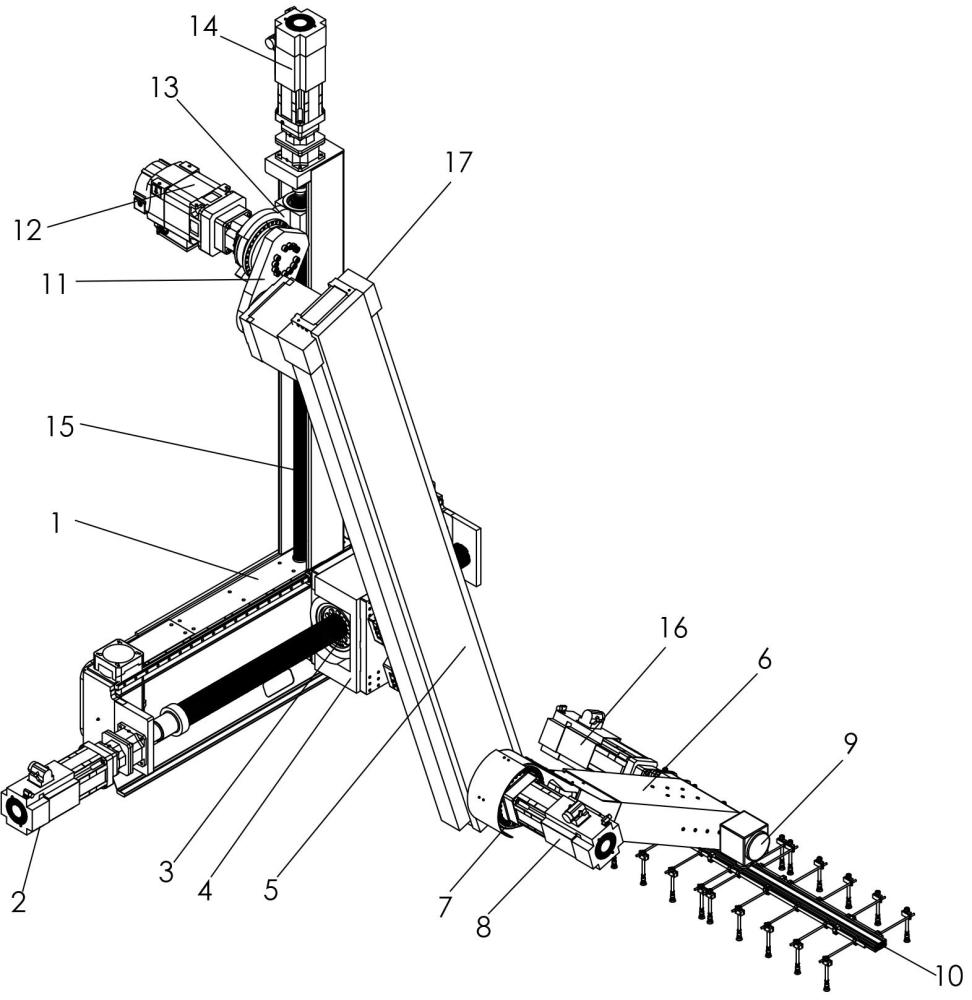
1.一种输送搬运机器人,其特征在于,包括:设置在机架(1)上的y轴位移机构(3)和z轴位移机构(15),所述y轴位移机构(3)上驱动连接的第一滑块(4)和所述z轴位移机构(15)上驱动连接的第二滑块(13)之间驱动连接有偏置曲柄滑块机构(17);
2.根据权利要求1所述的一种输送搬运机器人,其特征在于:所述y轴位移机构(3)包括设置在所述机架(1)的侧面上的第一伺服电机(2)以及与所述第一伺服电机(2)驱动连接且横向设置的第一行星滚柱丝杠(31),所述第一行星滚柱丝杠(31)上驱动设置有所述第一滑块(4)。
3.根据权利要求2所述的一种输送搬运机器人,其特征在于:所述第一滑块(4)上设置有枢转轴承组件(41),所述枢转轴承组件(41)的固定板(411)与所述第一滑块(4)固定安装,所述枢转轴承组件(41)的滑动板(412)滑动限定在所述摆臂(5)的位移衔接部(52)上,且所述固定板(411)与所述滑动板(412)通过枢转轴(413)枢转衔接。
4.根据权利要求3所述的一种输送搬运机器人,其特征在于:所述z轴位移机构(15)包括竖立设置在所述机架(1)上的第二行星滚柱丝杠(151),以及与所述第二行星滚柱丝杠(151)驱动连接的第三伺服电机(14),所述第二行星滚柱丝杠(151)上驱动连接有所述第二滑块(13)。
5.根据权利要求4所述的一种输送搬运机器人,其特征在于:所述第二滑块(13)的一端套设旋接在所述第二行星滚柱丝杠(151)上,所述第二滑块(13)的另一端上驱动设置有第二伺服电机(12),所述第二伺服电机(12)与所述第二连杆(11)驱动连接。
6.根据权利要求4所述的一种输送搬运机器人,其特征在于:所述摆臂(5)的一端设置有向外凸出的衔接凸件(51),所述衔接凸件(51)与所述第二连杆(11)枢转连接;所述衔接凸件(51)和所述端拾器(10)分别位于设置所述摆臂(5)的两端且位于所述摆臂(5)的相对侧。
7.根据权利要求4所述的一种输送搬运机器人,其特征在于:所述端拾器(10)通过第一连杆(6)枢转连接在所述摆臂(5)的端部;
8.根据权利要求4所述的一种输送搬运机器人,其特征在于:所述位移衔接部(52)包括滑槽或滑轨。
9.根据权利要求5所述的一种输送搬运机器人,其特征在于:所述y轴位移机构(3)的位移轨迹和z轴位移机构(15)的位移轨迹相互交叉。
10.根据权利要求5所述的一种输送搬运机器人,其特征在于:所述y轴位移机构(3)的位移轨迹和所述z轴位移机构(15)的位移轨迹相互垂直。
技术总结
本技术涉及机器人搬运技术领域,公开了一种输送搬运机器人,包括:设置在机架上的Y轴位移机构和Z轴位移机构,所述Y轴位移机构上驱动连接的第一滑块和所述Z轴位移机构上驱动连接的第二滑块之间驱动连接有偏置曲柄滑块机构;所述偏置曲柄滑块机构的第二连杆的一端与所述第二滑块驱动连接,所述第二连杆的另一端与摆臂的一端枢转连接,所述摆臂的另一端驱动连接有端拾器;且所述摆臂的一侧与所述第一滑块滑动衔接。本技术公开一种输送搬运机器人,结构相对简单且灵活性强,能在运转时保持结构稳定,提高传送效率。
技术研发人员:柳皓文,李轩,范立成
受保护的技术使用者:苏州大学
技术研发日:20230807
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!