一种用于多品种汽车桥箱兼容搬运夹具的制作方法
本技术涉及搬运夹具,具体为一种用于多品种汽车桥箱兼容搬运夹具。
背景技术:
1、常用的夹具通过气缸推动夹具臂的张开和关闭以及横向运动实现对工件的夹紧和释放。这种夹具依靠气缸的非满行程对工件形成一定的夹紧力,对夹具臂行走的距离以及横向的位置并无精确度的控制,只需夹紧即可,存在夹伤工件的风险。而且现有夹具只能用于单一品种或相似度较高工件的夹取,工件系列较多较复杂时该夹具将无法胜任装夹任务,兼容性较差。
技术实现思路
1、本实用新型为了解决上述提到的现有夹具横向运动位置不精确不能与待夹工件匹配的问题,特此提出了一种用于多品种汽车桥箱兼容搬运夹具。本实用新型通过设置的伺服电缸来实现对夹具横向位置的精确定位,用以适应不同长度的工件。
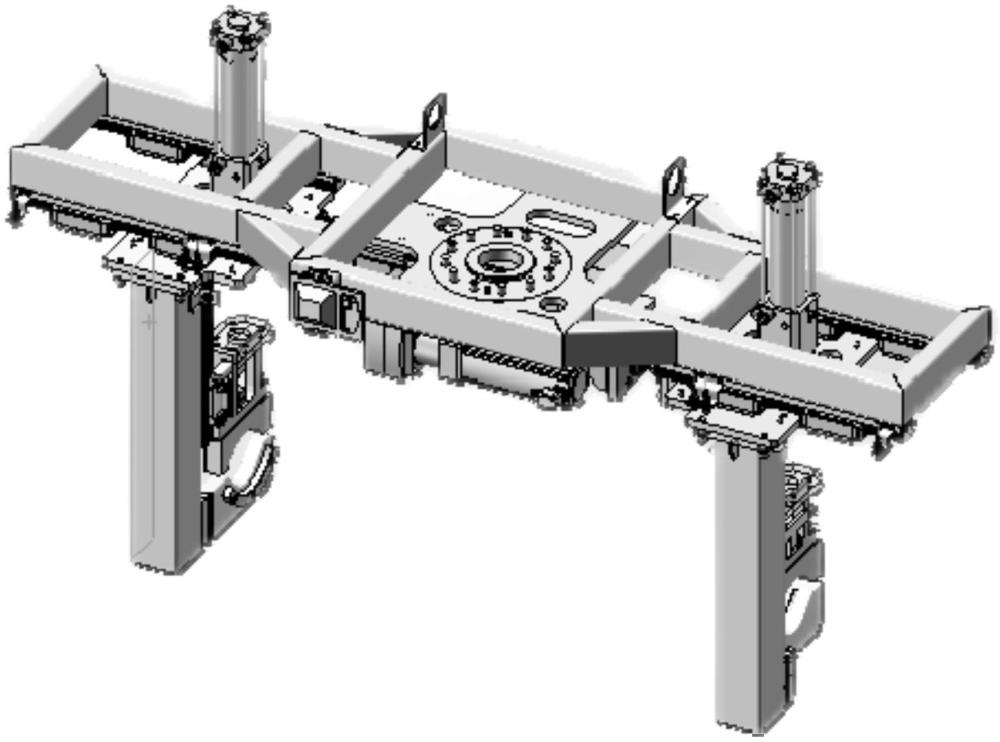
2、本实用新型提出了一种用于多品种汽车桥箱兼容搬运夹具,具体包括两个上夹臂、两个下夹臂、两个夹具立柱、夹具主框架、两个压紧气缸和两个伺服电缸,所述夹具主框架上对称安装有两个伺服电缸,伺服电缸伸缩端与夹具立柱连接,夹具立柱上端安装有压紧气缸,压紧气缸伸缩端与上夹臂连接,夹具立柱下端设置有下夹臂;上夹臂和下夹臂相对扣合在一起。
3、更进一步地,所述上夹臂和下夹臂相对侧都设置有圆弧槽。
4、更进一步地,所述夹具立柱包括安装座,安装座上设置有压紧气缸。
5、更进一步地,所述夹具主框架上设置有两个滑轨一,夹具立柱通过安装座滑动安装在滑轨一上。
6、更进一步地,所述夹具立柱上设置有滑轨二,上夹臂滑动安装在滑轨二上。
7、更进一步地,所述上夹臂上设置有气检装置。
8、更进一步地,所述夹具主框架最大宽度为570mm。
9、更进一步地,所述夹具主框架上设置有法兰盘,夹具主框架通过法兰盘安装到机器人上。
10、本实用新型所述的一种用于多品种汽车桥箱兼容搬运夹具的有益效果为:
11、(1)本实用新型所述的一种用于多品种汽车桥箱兼容搬运夹具,通过伺服电缸对夹具立柱进行驱动,对夹具立柱之间的距离进行精确定位,从而与不同类型的工件进行匹配;
12、(2)本实用新型所述的一种用于多品种汽车桥箱兼容搬运夹具,上夹臂上设置的气检装置对夹持状态进行判断,夹持完成触发气检装置后进行工件的转移。
技术特征:
1.一种用于多品种汽车桥箱兼容搬运夹具,其特征在于:包括两个上夹臂(1)、两个下夹臂(2)、两个夹具立柱(4)、夹具主框架(5)、两个压紧气缸(8)和两个伺服电缸(9),所述夹具主框架(5)上对称安装有两个伺服电缸(9),伺服电缸(9)伸缩端与夹具立柱(4)连接,夹具立柱(4)上端安装有压紧气缸(8),压紧气缸(8)伸缩端与上夹臂(1)连接,夹具立柱(4)下端设置有下夹臂(2);上夹臂(1)和下夹臂(2)相对扣合在一起。
2.根据权利要求1所述的用于多品种汽车桥箱兼容搬运夹具,其特征在于:所述上夹臂(1)和下夹臂(2)相对侧都设置有圆弧槽。
3.根据权利要求1所述的用于多品种汽车桥箱兼容搬运夹具,其特征在于:所述夹具立柱(4)包括安装座(10),安装座(10)上设置有压紧气缸(8)。
4.根据权利要求1所述的用于多品种汽车桥箱兼容搬运夹具,其特征在于:所述夹具主框架(5)上设置有两个滑轨一(6),夹具立柱(4)通过安装座(10)滑动安装在滑轨一(6)上。
5.根据权利要求1所述的用于多品种汽车桥箱兼容搬运夹具,其特征在于:所述夹具立柱(4)上设置有滑轨二(7),上夹臂(1)滑动安装在滑轨二(7)上。
6.根据权利要求1所述的用于多品种汽车桥箱兼容搬运夹具,其特征在于:所述上夹臂(1)上设置有气检装置(3)。
7.根据权利要求1所述的用于多品种汽车桥箱兼容搬运夹具,其特征在于:所述夹具主框架(5)最大宽度为570mm。
8.根据权利要求1所述的用于多品种汽车桥箱兼容搬运夹具,其特征在于:所述夹具主框架(5)上设置有法兰盘(11),夹具主框架(5)通过法兰盘(11)安装到机器人上。
技术总结
本技术公开了一种用于多品种汽车桥箱兼容搬运夹具,涉及搬运夹具技术领域,解决了现有夹具横向运动位置不精确不能与待夹工件匹配的问题。本技术包括两个上夹臂、两个下夹臂、两个夹具立柱、夹具主框架、两个压紧气缸和两个伺服电缸,所述夹具主框架上对称安装有两个伺服电缸,伺服电缸伸缩端与夹具立柱连接,夹具立柱上端安装有压紧气缸,压紧气缸伸缩端与上夹臂连接,夹具立柱下端设置有下夹臂;上夹臂和下夹臂相对扣合在一起。本技术本技术通过设置的伺服电缸来实现对夹具横向位置的精确定位,用以适应不同长度的工件。
技术研发人员:刘禹宏,吴欣明,闫智鹏,吉善楠,薛钧元
受保护的技术使用者:哈尔滨岛田大鹏工业股份有限公司
技术研发日:20230809
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!