石墨电极抓自动夹紧机构的制作方法
本技术属于冶炼工装的,尤其涉及石墨电极抓自动夹紧机构。
背景技术:
1、我国冶金工业发展很快,尤其是石墨电极的生产量已超过世界产量的一半,石墨电极的生产和以及提高生产效率极为重要,石墨电极使用中的搬运工装就显得尤为重要。
2、现有的中国专利数据库中,公开了名称为石墨电极抓,申请号为cn202221780010.8,申请日为2022-07-12,包括有至少两个平行设置的吊具分支,各吊具分支包括有一组相互铰接的连杆,各连杆下端分别铰接有左夹紧爪与右夹紧爪,所述左夹紧爪中部与右夹紧爪中部铰接,所述左夹紧爪下部铰接有倾斜向上的起爪限位板,起爪限位板另一端开设有卡槽,位于卡槽正对的右夹紧爪下部设置有限位轴,两吊具分支之间经穿过连杆的销轴连接成一体,所述两吊具分支上端连接有吊环,该装置利用杠杆原理来形成抓紧电极的工具,限位螺栓与起爪限位板的设置使得在使用后能够保证装置处于待使用状态,下次使用时无需人为掰开夹爪即可完成石墨电极的夹取,适用于工业生产中,具有很强的实用性。
3、针对现有技术中的石墨电极抓,在工作时,其能欧完成电极的自动夹紧,但在使夹紧爪脱离电极时,还需操作人员进行手动操作,因此本文旨在发明一种石墨电极抓自动夹紧机构,不需有额外的动力,完全释放工人的双手,即可以使电极抓在接触抓取对象时,左右两爪即可自动抱紧抓取对象,并且在石墨电极转运后,夹紧机构能够自动脱离电极。
技术实现思路
1、本实用新型要解决的技术问题是如何在石墨电极夹持转运过程中,完全释放工人的双手,实现电极夹持的自动化,为了改善其不足之处,本实用新型提供了石墨电极抓自动夹紧机构。
2、为达到上述目的,本实用新型是通过以下技术方案实现的:
3、石墨电极抓自动夹紧机构,包括有至少两个平行设置的吊具分支,各吊具分支包括有一组相互铰接的连杆,各连杆下端分别铰接有左夹紧爪与右夹紧爪,所述左夹紧爪中部与右夹紧爪中部铰接,两所述吊具分支之间经穿过连杆的起吊轴连接成一体,所述起吊轴上端连接有吊环,下端连接有楔块机构,所述楔块机构包括有与起吊轴铰接的限位座,限位座上竖直滑动连接的楔块,所述楔块上开设有竖直的腰型槽,腰型槽内穿插有定位销,定位销固定在限位座上,所述左夹紧爪与右夹紧爪经中轴铰接,位于中轴侧面的限位座侧面开设有限位缺口,中轴位于限位缺口内设置,且中轴外圆面抵触在楔块的楔形面上设置。
4、与现有技术相比,本实用新型具有的有益效果为:本方案通过楔块机构的设置,利用工厂行车或普通吊车在起吊时,即可以使电极抓在接触抓取对象时,左右两爪即可自动抱紧抓取对象,且在石墨电极转运后,夹紧机构能够自动脱离电极,该装置结构简单,成本低廉,适用于工业生产中,具有很强的实用性。
5、作为优选方案,所述限位座包括有与所述起吊轴铰接的限位板,所述限位缺口位于限位板内侧开设,限位板另一端边檐一体设置有导轨板,所述楔块竖直滑动连接在导轨板上。
6、作为优选方案,所述楔块底部一体设置有平板,所述平板下端面为电极接触面。
7、作为优选方案,所述左夹紧爪与右夹紧爪内表面上均设置有防滑坎,所述防滑坎包括有贴合在左夹紧爪与右夹紧爪内表面上的连接部,所述连接部内表面设置有用于防滑的锥形部。
8、作为优选方案,所述左夹紧爪与右夹紧爪形状相同,所述左夹紧爪包括有与连杆铰接的上杆部,所述上杆部下端一体设置有弧形的夹爪部。
技术特征:
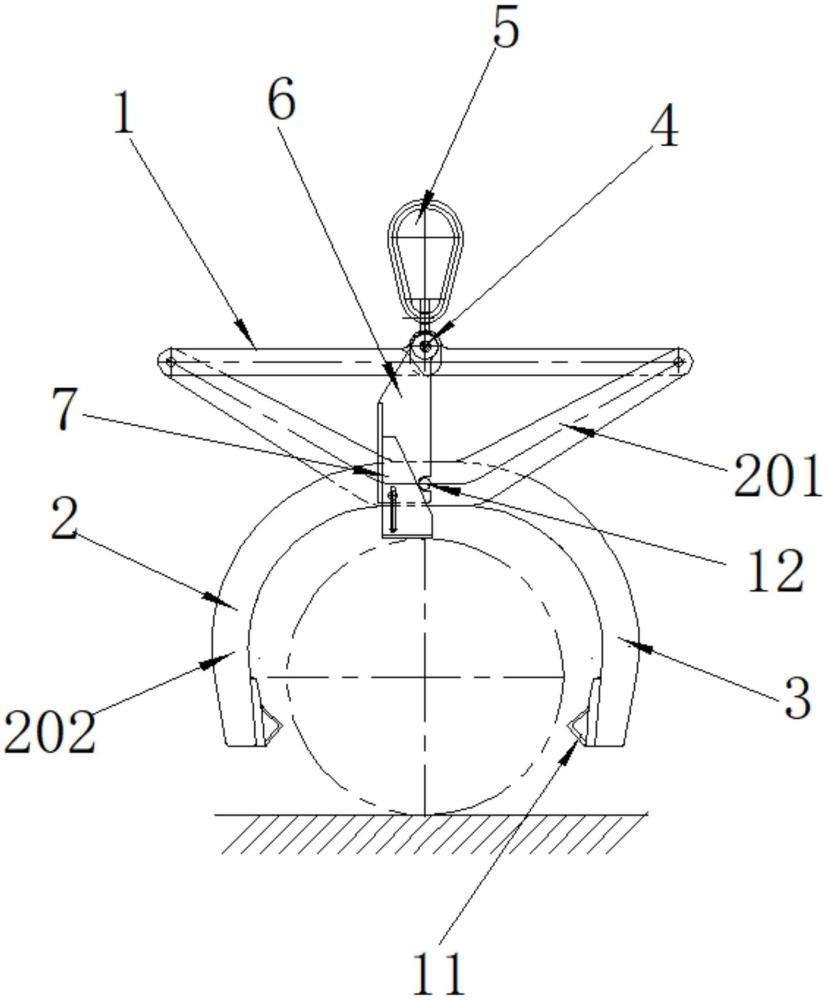
1.石墨电极抓自动夹紧机构,包括有至少两个平行设置的吊具分支,各吊具分支包括有一组相互铰接的连杆(1),各连杆(1)下端分别铰接有左夹紧爪(2)与右夹紧爪(3),所述左夹紧爪(2)中部与右夹紧爪(3)中部铰接,其特征在于:两所述吊具分支之间经穿过连杆(1)的起吊轴(4)连接成一体,所述起吊轴(4)上端连接有吊环(5),下端连接有楔块机构,所述楔块机构包括有与起吊轴(4)铰接的限位座(6),限位座(6)上竖直滑动连接的楔块(7),所述楔块(7)上开设有竖直的腰型槽(8),腰型槽(8)内穿插有定位销(9),定位销(9)固定在限位座(6)上,所述左夹紧爪(2)与右夹紧爪(3)经中轴(12)铰接,位于中轴(12)侧面的限位座(6)侧面开设有限位缺口(10),中轴(12)位于限位缺口(10)内设置,且中轴(12)外圆面抵触在楔块(7)的楔形面上设置。
2.根据权利要求1所述的石墨电极抓自动夹紧机构,其特征在于:所述限位座(6)包括有与所述起吊轴(4)铰接的限位板(601),所述限位缺口(10)位于限位板(601)内侧开设,限位板(601)另一端边檐一体设置有导轨板(602),所述楔块(7)竖直滑动连接在导轨板(602)上。
3.根据权利要求2所述的石墨电极抓自动夹紧机构,其特征在于:所述楔块(7)底部一体设置有平板,所述平板下端面为电极接触面。
4.根据权利要求3所述的石墨电极抓自动夹紧机构,其特征在于:所述左夹紧爪(2)与右夹紧爪(3)内表面上均设置有防滑坎(11),所述防滑坎(11)包括有贴合在左夹紧爪(2)与右夹紧爪(3)内表面上的连接部,所述连接部内表面设置有用于防滑的锥形部。
5.根据权利要求1-4中任一权利要求所述的石墨电极抓自动夹紧机构,其特征在于:所述左夹紧爪(2)与右夹紧爪(3)形状相同,所述左夹紧爪(2)包括有与连杆(1)铰接的上杆部(201),所述上杆部(201)下端一体设置有弧形的夹爪部(202)。
技术总结
本技术涉及石墨电极抓自动夹紧机构,包括有有一组相互铰接的连杆,各连杆下端分别铰接有左夹紧爪与右夹紧爪,所述左夹紧爪中部与右夹紧爪中部铰接,两吊具分支之间经穿过连杆的起吊轴连接成一体,起吊轴上端连接有吊环,下端连接有楔块机构,所述楔块机构包括有与起吊轴铰接的限位座,限位座上竖直滑动连接的楔块,所述楔块上开设有竖直的腰型槽,腰型槽内穿插有定位销,定位销固定在限位座上,所述左夹紧爪与右夹紧爪经中轴铰接,位于中轴侧面的限位座侧面开设有限位缺口,中轴位于限位缺口内设置,且中轴外圆面抵触在楔块的楔形面上设置,本装置不需有额外的动力,即可以使电极抓在接触抓取对象时,左右两爪即可自动抱紧抓取对象。
技术研发人员:周梅,吴诗德
受保护的技术使用者:扬州市众达气弹簧有限公司
技术研发日:20230816
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!