分拣设备及仓储系统的制作方法
本公开涉及仓储物流,特别地,本公开涉及一种分拣设备;本公开还涉及一种仓储系统。
背景技术:
1、在当今仓储系统的工作过程中,在进行分拣或播种等操作时,分拣设备需要将物体投递于料箱、笼车等容器中。在分拣设备将很多物体投递于容器中后,容器就有可能填满整个容器,继续投递物体的话,物体就会从容器上掉落,造成投递失败。因此,需要设置检测容器是否已经填满的设备。而在容器上设置检测容器是否已经填满的设备时,不仅对设备要求高,而且改造容器所需的成本也比较高。
技术实现思路
1、本公开为了解决现有技术中存在的问题,提供了一种分拣设备及仓储系统。
2、根据本公开的第一方面,提供了一种分拣设备,包括:
3、搬运机构,所述搬运机构设置有用于存储物体的暂存位,所述搬运机构被配置为移动至对接位以将所述暂存位上的物体转移至容器中;
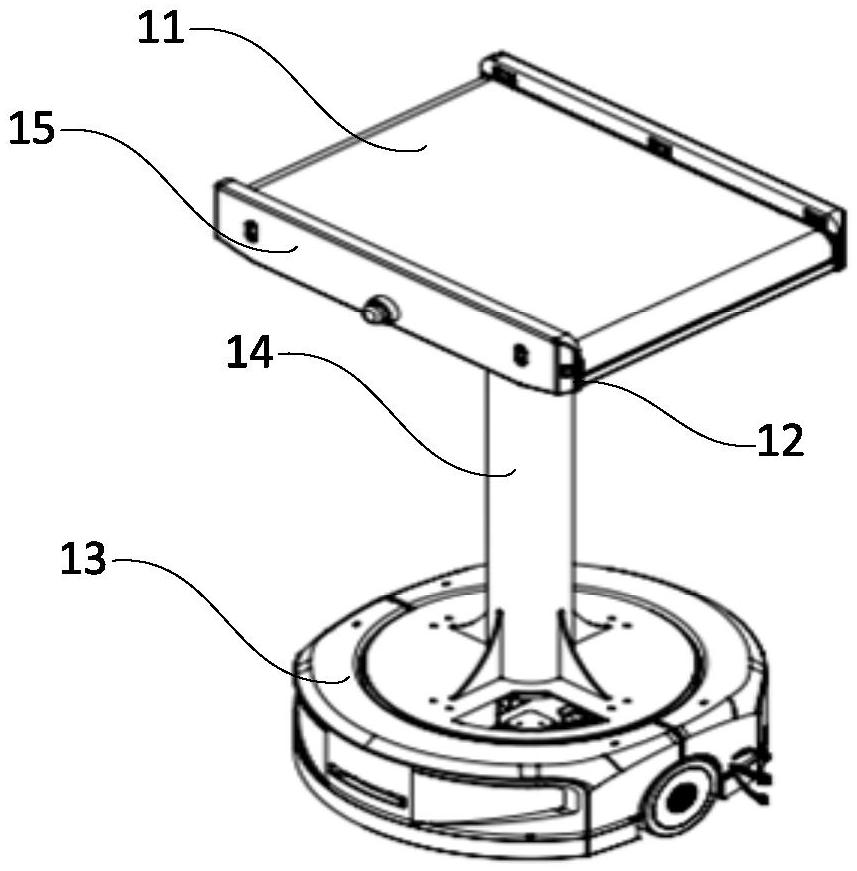
4、检测传感器,所述检测传感器设置在搬运机构上与容器预定装载高度对应的位置,所述检测传感器的检测范围位于所述容器在预定装载高度的截面,且被配置为当容器中的物体超出容器预定装载高度的截面时被触发。
5、在本公开的一个实施例中,所述检测传感器设置有至少一个,所述检测传感器被配置为沿直线方向发送检测信号,且被配置为在收到返回信号时被触发。
6、在本公开的一个实施例中,所述检测传感器被配置为通过运动使所述检测传感器的检测范围位于所述容器在预定装载高度的截面,以在容器中的物体超出容器预定装载高度的截面时被触发。
7、在本公开的一个实施例中,所述容器具有上端开口,所述物体被配置为通过上端开口转移至容器内;
8、所述检测传感器被配置为通过运动使所述检测传感器的检测范围位于所述容器的上端开口,以在容器中的物体超出容器的上端开口时被触发。
9、在本公开的一个实施例中,所述检测传感器与所述搬运机构固定连接,所述搬运机构被构造为在运动的过程中带动所述检测传感器运动,以使所述检测传感器的检测范围位于所述容器在预定装载高度的截面。
10、在本公开的一个实施例中,所述分拣设备包括底盘机构,所述搬运机构连接在底盘机构上;所述底盘机构被构造为带动所述搬运机构在工作面上移动。
11、在本公开的一个实施例中,所述底盘机构被配置为带动所述搬运机构平动和/或转动,以使所述检测传感器的检测范围位于所述容器在预定装载高度的截面。
12、在本公开的一个实施例中,所述搬运机构被构造为通过支撑件连接在底盘机构上方;所述搬运机构包括承载座,在所述承载座上形成所述暂存位;所述检测传感器设置在承载座上位于暂存位的外侧的位置。
13、在本公开的一个实施例中,所述底盘机构被构造为带动所述搬运机构在预设运动方向运动,所述搬运机构被构造为将物体从预设转移方向转移至容器中;其中,所述预设运动方向与预设转移方向垂直。
14、在本公开的一个实施例中,所述搬运机构被构造为在运动至对接位的过程中或者离开对接位的过程中,带动所述检测传感器运动,以使所述检测传感器的检测范围位于所述容器在预定装载高度的截面。
15、在本公开的一个实施例中,所述搬运机构被构造为沿方向相反的第一转移方向、第二转移方向转移物体至容器中;所述搬运机构上位于第一转移方向的一侧设置有第一检测传感器,且被构造为用于检测位于第一转移方向上容器中的物体;所述搬运机构上位于第二转移方向的一侧设置有第二检测传感器,且被构造为用于检测位于第二转移方向上容器中的物体。
16、在本公开的一个实施例中,所述分拣设备还包括水平轨道和/或竖直轨道,所述搬运机构被配置为通过所述水平轨道沿水平方向移动,通过所述竖直轨道沿高度方向移动,以带动所述检测传感器运动。
17、在本公开的一个实施例中,所述检测传感器被配置通过运动机构连接在所述搬运机构上,在所述搬运机构移动至对接位的情况下,所述运动机构被构造为带动所述检测传感器相对于搬运机构运动,以使所述检测传感器的检测范围位于所述容器在预定装载高度的截面。
18、在本公开的一个实施例中,所述容器设置有至少一个,所述检测传感器被配置为通过运动使所述检测传感器的检测范围位于至少一个所述容器在预定装载高度的截面。
19、在本公开的一个实施例中,所述检测传感器被配置为通过运动使所述检测传感器探测容器的内部剩余空间。
20、在本公开的一个实施例中,还包括控制单元,所述控制单元与所述检测传感器通信连接,且被配置为在所述检测传感器被触发的信号后判定所述容器内的物体超出容器的预定装载高度。
21、在本公开的一个实施例中,所述搬运机构被构造为在检测传感器未检测到容器中的物体超出容器预定装载高度时,将所述暂存位上的物体转移至容器中。
22、在本公开的一个实施例中,所述搬运机构被构造为在检测传感器检测到容器中的物体超出容器预定装载高度时,将所述暂存位上的物体转移至另一容器中。
23、在本公开的一个实施例中,所述检测传感器被配置为在搬运机构将所述暂存位上的物体转移至容器后,检测物体是否超出容器的预定装载高度。
24、根据本公开的第二方面,提供了仓储系统,包括:
25、容器,所述容器被构造为用于容纳物体;
26、分拣设备,所述分拣设备被配置为将暂存位上的物体转移至容器中。
27、在本公开的分拣设备中,由于检测传感器设置在分拣设备上,且可以当容器中的物体超出容器预定装载高度的截面时被触发,这样,分拣设备可以基于检测传感器是否被触发,控制搬运机构工作,进而可以优化分拣设备的工作过程,避免出现在分拣过程中物体从容器上掉落的情况。而且,由于检测传感器设置在分拣设备上,也无需对容器的结构进行改动,从而可以有效降低改造成本。
28、通过以下参照附图对本公开的示例性实施例的详细描述,本公开的其它特征及其优点将会变得清楚。
技术特征:
1.一种分拣设备,其特征在于,包括:
2.根据权利要求1所述的分拣设备,其特征在于,所述检测传感器(12)设置有至少一个,所述检测传感器(12)被配置为沿直线方向发送检测信号,且被配置为在收到返回信号时被触发。
3.根据权利要求2所述的分拣设备,其特征在于,所述检测传感器(12)被配置为通过运动使所述检测传感器(12)的检测范围位于所述容器(2)在预定装载高度的截面,以在容器(2)中的物体(3)超出容器(2)预定装载高度的截面时被触发。
4.根据权利要求3所述的分拣设备,其特征在于,所述容器(2)具有上端开口,所述物体(3)被配置为通过上端开口转移至容器(2)内;
5.根据权利要求3所述的分拣设备,其特征在于,所述检测传感器(12)与所述搬运机构(11)固定连接,所述搬运机构(11)被构造为在运动的过程中带动所述检测传感器(12)运动,以使所述检测传感器(12)的检测范围位于所述容器(2)在预定装载高度的截面。
6.根据权利要求5所述的分拣设备,其特征在于,所述分拣设备(1)包括底盘机构(13),所述搬运机构(11)连接在底盘机构(13)上;所述底盘机构(13)被构造为带动所述搬运机构(11)在工作面上移动。
7.根据权利要求6所述的分拣设备,其特征在于,所述底盘机构(13)被配置为带动所述搬运机构(11)平动和/或转动,以使所述检测传感器(12)的检测范围位于所述容器(2)在预定装载高度的截面。
8.根据权利要求6所述的分拣设备,其特征在于,所述搬运机构(11)被构造为通过支撑件(14)连接在底盘机构(13)上方;所述搬运机构(11)包括承载座(15),在所述承载座(15)上形成所述暂存位;所述检测传感器(12)设置在承载座(15)上位于暂存位的外侧的位置。
9.根据权利要求8所述的分拣设备,其特征在于,所述底盘机构(13)被构造为带动所述搬运机构(11)在预设运动方向运动,所述搬运机构(11)被构造为将物体(3)从预设转移方向转移至容器(2)中;其中,所述预设运动方向与预设转移方向垂直。
10.根据权利要求5所述的分拣设备,其特征在于,所述搬运机构(11)被构造为在运动至对接位的过程中或者离开对接位的过程中,带动所述检测传感器(12)运动,以使所述检测传感器(12)的检测范围位于所述容器(2)在预定装载高度的截面。
11.根据权利要求5所述的分拣设备,其特征在于,所述搬运机构(11)被构造为沿方向相反的第一转移方向、第二转移方向转移物体(3)至容器(2)中;所述搬运机构(11)上位于第一转移方向的一侧设置有第一检测传感器(12),且被构造为用于检测位于第一转移方向上容器(2)中的物体(3);所述搬运机构(11)上位于第二转移方向的一侧设置有第二检测传感器(12),且被构造为用于检测位于第二转移方向上容器(2)中的物体(3)。
12.根据权利要求3所述的分拣设备,其特征在于,所述分拣设备(1)还包括水平轨道(16)和/或竖直轨道(17),所述搬运机构(11)被配置为通过所述水平轨道(16)沿水平方向移动,通过所述竖直轨道(17)沿高度方向移动,以带动所述检测传感器(12)运动。
13.根据权利要求3所述的分拣设备,其特征在于,所述检测传感器(12)被配置通过运动机构连接在所述搬运机构(11)上,在所述搬运机构(11)移动至对接位的情况下,所述运动机构被构造为带动所述检测传感器(12)相对于搬运机构(11)运动,以使所述检测传感器(12)的检测范围位于所述容器(2)在预定装载高度的截面。
14.根据权利要求3所述的分拣设备,其特征在于,所述容器(2)设置有至少一个,所述检测传感器(12)被配置为通过运动使所述检测传感器(12)的检测范围位于至少一个所述容器(2)在预定装载高度的截面。
15.根据权利要求2所述的分拣设备,其特征在于,所述检测传感器(12)被配置为通过运动使所述检测传感器(12)探测容器(2)的内部剩余空间。
16.根据权利要求2所述的分拣设备,其特征在于,还包括控制单元,所述控制单元与所述检测传感器(12)通信连接,且被配置为在所述检测传感器(12)被触发的信号后判定所述容器(2)内的物体超出容器(2)的预定装载高度。
17.根据权利要求1至16任一项所述的分拣设备,其特征在于,所述搬运机构(11)被构造为在检测传感器(12)未检测到容器(2)中的物体(3)超出容器(2)预定装载高度时,将所述暂存位上的物体(3)转移至容器(2)中。
18.根据权利要求17所述的分拣设备,其特征在于,所述搬运机构(11)被构造为在检测传感器(12)检测到容器(2)中的物体(3)超出容器(2)预定装载高度时,将所述暂存位上的物体(3)转移至另一容器(2)中。
19.根据权利要求1至16任一项所述的分拣设备,其特征在于,所述检测传感器(12)被配置为在搬运机构(11)将所述暂存位上的物体(3)转移至容器(2)后,检测物体(3)是否超出容器(2)的预定装载高度。
20.一种仓储系统,其特征在于,包括:
技术总结
本公开涉及一种分拣设备及仓储系统,该分拣设备包括搬运机构和检测传感器;搬运机构设置有用于存储物体的暂存位,搬运机构被配置为移动至对接位以将暂存位上的物体转移至容器中;检测传感器设置在搬运机构上与容器预定装载高度对应的位置,且被配置为当容器中的物体超出容器预定装载高度的截面时被触发。在本公开的分拣设备中,由于检测传感器设置在分拣设备上,且可以当物体超出容器预定装载高度的截面时被触发,这样,分拣设备可以基于检测传感器是否被触发,控制搬运机构工作,进而可以优化分拣设备的工作过程,避免出现在分拣过程中物体从容器上掉落的情况。由于检测传感器设置在分拣设备上,也无需对容器的结构进行改动。
技术研发人员:袭开俣
受保护的技术使用者:北京极智嘉科技股份有限公司
技术研发日:20230824
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!