一种用于铝锭搬运的剪式机械手的制作方法
本技术涉及铝锭加工,具体涉及一种用于铝锭搬运的剪式机械手。
背景技术:
1、在铝锭加工过程中,通常需要对塑形后捆扎的铝锭进行称重和搬运,而塑形好的铝锭通常为梯形,使用叉车搬运不容易被铲起,通常是使用叉车、航吊通过捆扎线提起后先进行称重再搬运去后续工序,这样不但繁琐,还存在捆扎断裂,铝锭散落,砸伤工作人员等情况。
2、或者使用吊装夹臂,通过铰接定夹紧臂、动夹紧臂和剪式架在吊升装置吊升过程中可带动铰接杆下端相互靠近从而带动两夹紧臂相互靠近来进行夹取搬运,这种方法虽然可以避免捆扎断裂的情况,但是依然存在先进行搬运称重,再搬运去后续加工的繁琐工序。
技术实现思路
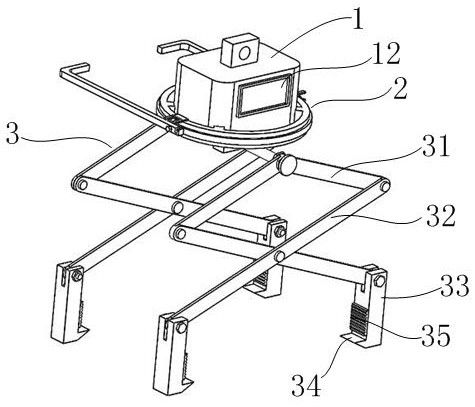
1、为解决现有技术存在的上述技术问题或技术问题之一,本实用新型公开一种用于铝锭搬运的剪式机械手,包括电子秤、旋转装置和机械臂,所述旋转装置固接于电子秤的外侧面,所述电子秤包括秤体、与秤体顶部固接的吊环和与秤体内传感器固接的吊板,所述吊板设于秤体的下方,所述吊板的底部设有连接杆,所述连接杆的中部与吊板固接,两端均与机械臂的顶端铰接,所述机械臂包括短臂、长臂和抓臂,2个所述短臂的顶端与连接杆铰接,2个所述长臂的顶端分别与2个短臂的底端铰接,2个所述长臂的底端分别与2个所述抓臂的顶端螺接,2个所述长臂的中部通过铆钉铰接。
2、进一步的,所述旋转装置包括支撑架、轴承、连接块和把手,所述支撑架通过连接块与电子秤固接,所述支撑架的外侧面设有凹槽,所述轴承设于凹槽内,所述把手的一端与轴承铰接。
3、进一步的,所述支撑架的顶面设有合页,所述合页的一端与支撑架固接,另一端设有开口,所述开口的位置与把手与轴承铰接的为位置对应。
4、进一步的,所述轴承的外侧面设有限位销,所述把手与轴承铰接一端的顶面设有槽口,所述限位销与槽口的位置对应。
5、进一步的,所述抓臂的底部设有抓钩,所述抓钩的顶面为平面,所述抓臂的内侧壁设有胶垫。
6、进一步的,所述连接杆的两端均设有挡板,所述短臂的两侧均设有与连接杆螺接的限位螺母。
7、进一步的,所述连接杆上设有多个间断的螺纹。
8、进一步的,所述秤体上设有显示屏。
9、与现有技术相比,本实用新型通过航车与顶部吊环连接控制移动,通过提拉控制机械手的夹取,通过机械手从底部或者中部夹取铝锭,避免对捆扎提拉造成捆扎断裂铝锭散落的情况,铝锭在被夹起的同时能够通过电子秤直接承重,夹取后直接搬运至后续工序,简化了先搬运承重再搬运的工序。
10、通过把手,增加人工和铝锭的距离,避免铝锭掉落砸伤,同时通过把手能够方便稳定搬运中的铝锭,避免摇晃,辅助定点夹取装卸。
技术特征:
1.一种用于铝锭搬运的剪式机械手,其特征在于,包括电子秤(1)、旋转装置(2)和机械臂(3),所述旋转装置(2)固接于电子秤(1)的外侧面,所述电子秤(1)包括秤体、与秤体顶部固接的吊环(11)和与秤体内传感器固接的吊板(13),所述吊板(13)设于秤体的下方,所述吊板(13)的底部设有连接杆(36),所述连接杆(36)的中部与吊板(13)固接,两端均与机械臂(3)的顶端铰接,所述机械臂(3)包括短臂(31)、长臂(32)和抓臂(33),2个所述短臂(31)的顶端与连接杆(36)铰接,2个所述长臂(32)的顶端分别与2个短臂(31)的底端铰接,2个所述长臂(32)的底端分别与2个所述抓臂(33)的顶端螺接,2个所述长臂(32)的中部通过铆钉铰接。
2.根据权利要求1所述的一种用于铝锭搬运的剪式机械手,其特征在于,所述旋转装置(2)包括支撑架(21)、轴承(22)、连接块(23)和把手(24),所述支撑架(21)通过连接块(23)与电子秤(1)固接,所述支撑架(21)的外侧面设有凹槽,所述轴承(22)设于凹槽内,所述把手(24)的一端与轴承(22)铰接。
3.根据权利要求2所述的一种用于铝锭搬运的剪式机械手,其特征在于,所述支撑架(21)的顶面设有合页(25),所述合页(25)的一端与支撑架(21)固接,另一端设有开口(251),所述开口(251)的位置与把手(24)与轴承(22)铰接的为位置对应。
4.根据权利要求2所述的一种用于铝锭搬运的剪式机械手,其特征在于,所述轴承(22)的外侧面设有限位销(221),所述把手(24)与轴承(22)铰接一端的顶面设有槽口(241),所述限位销(221)与槽口(241)的位置对应。
5.根据权利要求1所述的一种用于铝锭搬运的剪式机械手,其特征在于,所述抓臂(33)的底部设有抓钩(34),所述抓钩(34)的顶面为平面,所述抓臂(33)的内侧壁设有胶垫。
6.根据权利要求1所述的一种用于铝锭搬运的剪式机械手,其特征在于,所述连接杆(36)的两端均设有挡板(38),所述短臂(31)的两侧均设有与连接杆(36)螺接的限位螺母。
7.根据权利要求1所述的一种用于铝锭搬运的剪式机械手,其特征在于,所述连接杆(36)上设有多个间断的螺纹(37)。
8.根据权利要求1所述的一种用于铝锭搬运的剪式机械手,其特征在于,所述秤体上设有显示屏(12)。
技术总结
本技术涉及铝锭加工技术领域,具体涉及一种用于铝锭搬运的剪式机械手,包括电子秤、旋转装置和机械臂,所述旋转装置固接于电子秤的外侧面,所述电子秤包括秤体、与秤体顶部固接的吊环和与秤体内传感器固接的吊板,所述吊板设于秤体的下方,所述吊板的底部设有连接杆,所述连接杆的中部与吊板固接,两端均与机械臂的顶端铰接,与现有技术相比,本技术通过航车与顶部吊环连接控制移动,通过提拉控制机械手的夹取,通过机械手从底部或者中部夹取铝锭,避免对捆扎提拉造成捆扎断裂铝锭散落的情况,铝锭在被夹起的同时能够通过电子秤直接承重,夹取后直接搬运至后续工序,简化了先搬运承重再搬运的工序。
技术研发人员:李浩,四战涛,林雪丽,邹来伦,方超
受保护的技术使用者:隆达铝业(烟台)有限公司
技术研发日:20230829
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!