一种具有多层储物结构的物流机器人的制作方法
本技术涉及物流机器人,具体涉及一种具有多层储物结构的物流机器人。
背景技术:
1、随着电子商务的爆炸性增长,目前电商的仓储分拣工作量也大幅增加,很多电商为了降低人工成本,提高工作效率,都在仓库中配备了几十或几百台物流机器人进行分拣工作,物流机器人虽然相比较人工更能准确快速的将快递运送到指定的投放口,然而目前使用的物流机器人一次只能搬运一个快递到指定投放口,当仓库内需要分拣的快递数量增多时,虽然增加物流机器人的数量能够在一定程度上提高分拣效率,但是不仅增加了成本,同时也会由于物流机器人数量的增加,使仓库内物流机器人的密度变高,物流机器人的运输路线会变拥堵,增加了物流机器人避让其他物流机器人的时间,这种情况也非常影响整个仓库内的分拣效率。
2、经检索发现,授权公告号为cn214323387u的实用新型专利公开了一种具有多层储物结构的物流机器人,包括机身、升降机构、连接架、承载板、电机和支撑块,所述升降机构包括电缸、导向柱和支撑板,所述机身的顶部设置有放置所述电缸的电缸槽,所述电缸固定在所述电缸槽内,所述支撑板固定在所述电缸的伸出端,多个所述导向柱沿周向均匀竖直固定在所述支撑板的底部,所述机身的顶部开设有与所述导向柱滑动插接的导向柱槽。与此同时,本实用新型能够通过连接架、承载板、电机和升降机构的设置,使物流机器人能够一次运输多个快递,不仅有效的提高了仓库的分拣工作效率,还能降低物流机器人的购买成本,分拣工作量增多时能够通过使用这种多层储物结构达到快速分拣的目的。
3、上述专利中,虽有效的提高了仓库的分拣工作效率,还能降低物流机器人的购买成本,分拣工作量增多时能够通过使用这种多层储物结构达到快速分拣的目的,但是承载板的间距不可调,不便于对不同大小的货物进行分拣。
技术实现思路
1、针对现有技术中存在的问题,本实用新型的目的在于提供一种具有多层储物结构的物流机器人,以解决背景技术问题。
2、为实现上述目的,本实用新型采用如下的技术方案。
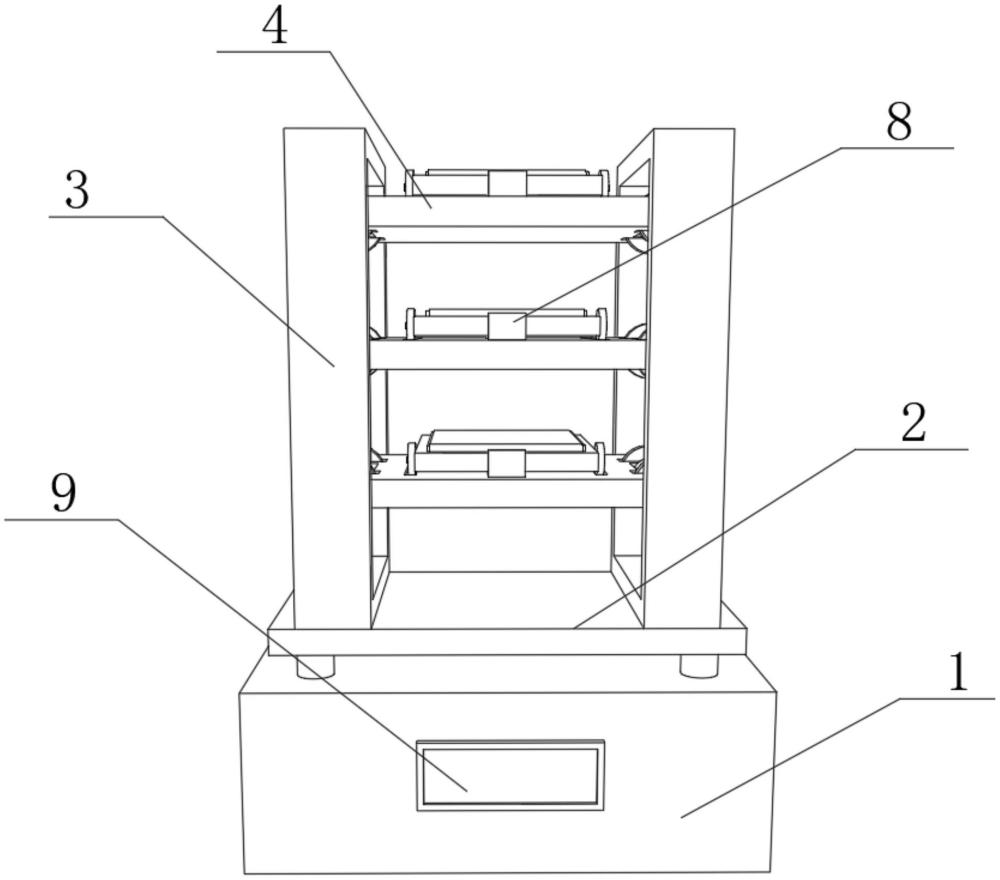
3、一种具有多层储物结构的物流机器人,包括机座,所述机座的顶部固定连接有安装板,所述安装板的顶部固定连接有两个竖板,两个所述竖板之间滑动连接有等距离排列的隔板,所述隔板的左右两侧均安装有双轴电机,所述隔板的左右两侧均嵌设有两个与其转动连接的齿轮,所述双轴电机的输出轴贯穿隔板并与齿轮固定连接,两个所述竖板的相对一侧均开设有两个与齿轮相啮合的齿槽,所述隔板的顶部设置有下料结构。
4、作为上述技术方案的进一步描述:
5、所述机座包括底座,所述底座的顶部穿插有与其固定连接的电动推杆一,所述电动推杆一的底端固定连接有升降板,所述升降板的顶部固定连接有四个支撑杆,四个所述支撑杆的顶端均贯穿底座并与安装板固定连接。
6、作为上述技术方案的进一步描述:
7、所述底座的正面固定连接有控制器,所述控制器的输出端分别与双轴电机以及电动推杆一信号连接。
8、作为上述技术方案的进一步描述:
9、所述下料结构包括电动推杆二,所述电动推杆二的一端与隔板固定连接,所述电动推杆二的另一端固定连接有移动框,所述移动框的内侧转动连接有两个安装杆,所述移动框的内侧设置有输送带,所述输送带套设于两个安装杆上,两个所述安装杆上均套设有与其固定连接的驱动轮,所述输送带的内侧开设有与驱动轮相啮合的驱动槽,正面所述安装杆的两端均贯穿移动框并固定连接有转动轮,所述隔板的顶部开设有两个与转动轮相啮合的滑槽。
10、作为上述技术方案的进一步描述:
11、所述输送带上套设有与其固定连接的防滑套,所述防滑套的表面开设有防滑纹。
12、相比于现有技术,本实用新型的优点在于:
13、本方案可以调节相邻两个用于放置货物的结构的间距,进而可以适用于不同大小的货物进行使用,提高装置的实用性。
技术特征:
1.一种具有多层储物结构的物流机器人,包括机座(1),其特征在于:所述机座(1)的顶部固定连接有安装板(2),所述安装板(2)的顶部固定连接有两个竖板(3),两个所述竖板(3)之间滑动连接有等距离排列的隔板(4),所述隔板(4)的左右两侧均安装有双轴电机(5),所述隔板(4)的左右两侧均嵌设有两个与其转动连接的齿轮(6),所述双轴电机(5)的输出轴贯穿隔板(4)并与齿轮(6)固定连接,两个所述竖板(3)的相对一侧均开设有两个与齿轮(6)相啮合的齿槽(7),所述隔板(4)的顶部设置有下料结构(8)。
2.根据权利要求1所述的一种具有多层储物结构的物流机器人,其特征在于:所述机座(1)包括底座(101),所述底座(101)的顶部穿插有与其固定连接的电动推杆一(102),所述电动推杆一(102)的底端固定连接有升降板(103),所述升降板(103)的顶部固定连接有四个支撑杆(104),四个所述支撑杆(104)的顶端均贯穿底座(101)并与安装板(2)固定连接。
3.根据权利要求2所述的一种具有多层储物结构的物流机器人,其特征在于:所述底座(101)的正面固定连接有控制器(9),所述控制器(9)的输出端分别与双轴电机(5)以及电动推杆一(102)信号连接。
4.根据权利要求1所述的一种具有多层储物结构的物流机器人,其特征在于:所述下料结构(8)包括电动推杆二(801),所述电动推杆二(801)的一端与隔板(4)固定连接,所述电动推杆二(801)的另一端固定连接有移动框(802),所述移动框(802)的内侧转动连接有两个安装杆(803),所述移动框(802)的内侧设置有输送带(804),所述输送带(804)套设于两个安装杆(803)上,两个所述安装杆(803)上均套设有与其固定连接的驱动轮(805),所述输送带(804)的内侧开设有与驱动轮(805)相啮合的驱动槽(806),正面所述安装杆(803)的两端均贯穿移动框(802)并固定连接有转动轮(807),所述隔板(4)的顶部开设有两个与转动轮(807)相啮合的滑槽(808)。
5.根据权利要求4所述的一种具有多层储物结构的物流机器人,其特征在于:所述输送带(804)上套设有与其固定连接的防滑套(10),所述防滑套(10)的表面开设有防滑纹。
技术总结
本技术公开了一种具有多层储物结构的物流机器人,包括机座,所述机座的顶部固定连接有安装板,所述安装板的顶部固定连接有两个竖板,两个所述竖板之间滑动连接有等距离排列的隔板,所述隔板的左右两侧均安装有双轴电机,所述隔板的左右两侧均嵌设有两个与其转动连接的齿轮,所述双轴电机的输出轴贯穿隔板并与齿轮固定连接,两个所述竖板的相对一侧均开设有两个与齿轮相啮合的齿槽,所述隔板的顶部设置有下料结构。该技术,可以调节相邻两个用于放置货物的结构的间距,进而可以适用于不同大小的货物进行使用。
技术研发人员:周长春,高广志,何明平,姚涛
受保护的技术使用者:河北航瑞信科精密机械有限公司
技术研发日:20230831
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!