一种夹爪机械手的制作方法
本技术涉及机械手,尤其涉及一种夹爪机械手。
背景技术:
1、目前,该领域内的夹爪机械手结构较为复杂,生产成本较高,而部分结构简单的往往存在取货时精度很难保证的现象,这就大大减少了取货时的正确率和效率。
技术实现思路
1、本实用新型的目的在于克服现有技术的缺陷,提供一种结构简单的夹爪机械手,通过凸轮的旋转带动移动夹板精确的左右移动,实现夹爪机械手的打开与关闭,从而精准取货。
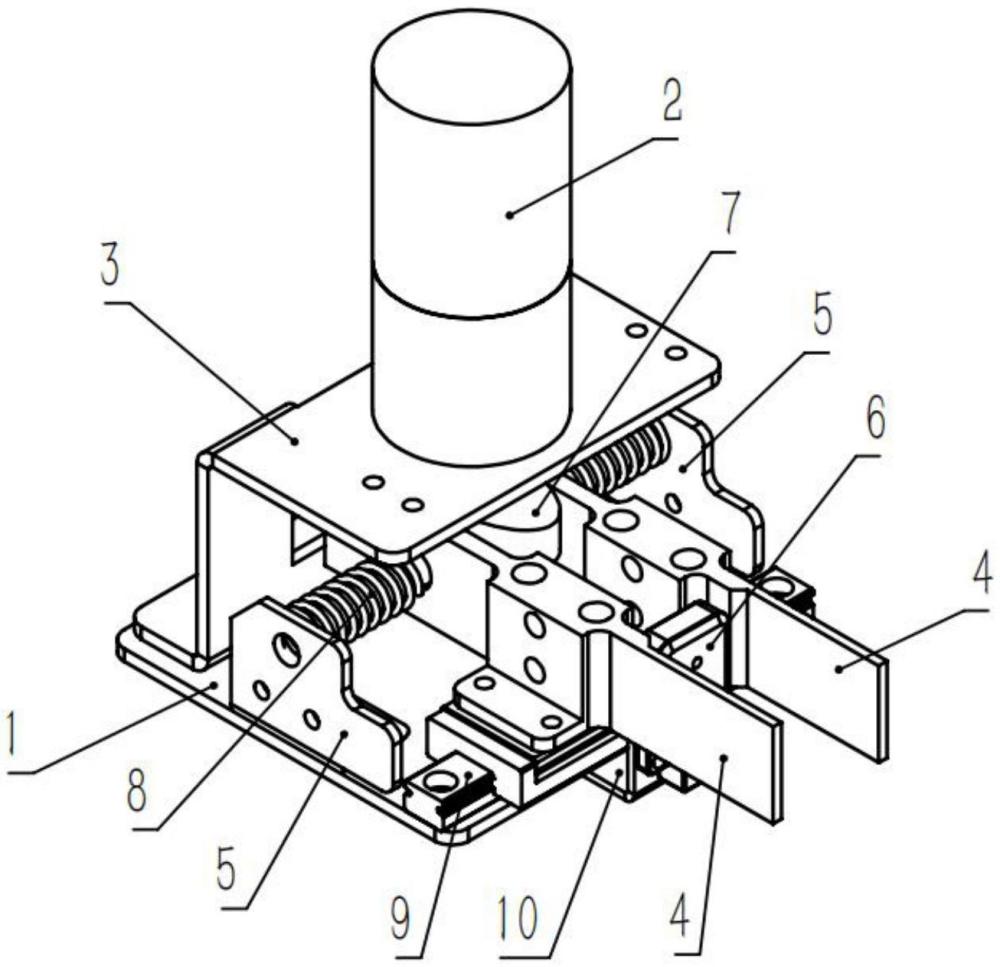
2、为实现上述目的,本实用新型采用了以下技术方案:一种夹爪机械手,包括底板、导轨、凸轮、传动轴、移动夹板、电机和激光传感器,其中:
3、所述导轨水平设置在所述底板上,所述导轨上设置有所述移动夹板;
4、所述底板上设置有电机安装板,所述电机设置在电机安装板上,且所述电机的输出轴上设置有所述凸轮,所述凸轮与所述移动夹板保持相切;
5、所述底板左右两侧设置有传动轴安装板,传动轴安装板呈l型,且设有所述传动轴的固定孔;
6、所述传动轴与所述移动夹板之间设置有压缩弹簧;
7、所述移动夹板之间设置有所述激光传感器,所述激光传感器通过支架固定在所述底板上。
8、优选的,所述导轨采用精密直线导轨。
9、优选的,所述底板通过支撑板固定在xy轴运动模块的x轴上。
10、优选的,所述压缩弹簧与所述移动夹板均穿入所述传动轴,所述传动轴两端固定在所述传动轴安装板上。
11、优选的,所述电机安装板呈z字型,固定在所述底板的正上方。
12、优选的,所述电机、激光传感器分别外接至控制板。
13、本实用新型提供一种夹爪机械手,结构较为简单,有以下有益的效果:
14、(1)电机带动凸轮旋转,可精准的控制移动夹板打开的大小,实现精准取货;
15、(2)采用精密直线导轨,不会出现移动夹板偏移的现象;
16、(3)激光传感器可以检测取货是否成功。
技术特征:
1.一种夹爪机械手,其特征在于,包括底板、导轨、凸轮、传动轴、移动夹板、电机和激光传感器,其中:
2.根据权利要求1所述的一种夹爪机械手,其特征在于,所述导轨采用精密直线导轨。
3.根据权利要求1所述的一种夹爪机械手,其特征在于,所述底板通过支架固定在xy轴运动模块的x轴上。
4.根据权利要求1所述的一种夹爪机械手,其特征在于,所述压缩弹簧与所述移动夹板均穿入所述传动轴,所述传动轴固定在所述传动轴安装板上。
5.根据权利要求1所述的一种夹爪机械手,其特征在于,所述电机安装板呈z字型,固定在所述底板的正上方。
6.根据权利要求1所述的一种夹爪机械手,其特征在于,所述电机、激光传感器分别外接至控制板。
技术总结
本技术提出了一种夹爪机械手,包括底板、导轨、凸轮、传动轴、移动夹板、电机和激光传感器,导轨水平设置在底板上,导轨上设置有移动夹板;底板上设置有电机安装板,电机设置在电机安装板上,且电机的输出轴上设置有凸轮,凸轮与移动夹板保持相切;底板左右两侧设置有传动轴安装板,传动轴安装板呈L型,且设有传动轴的固定孔;传动轴与移动夹板之间设置有压缩弹簧;移动夹板之间设置有激光传感器,激光传感器通过支架固定在底板上。本技术的夹爪取货机械手设计创新,结构简单,通过电机带着凸轮的旋转带动移动夹板精确的左右移动,实现夹爪机械手的打开与关闭,从而精准取货。
技术研发人员:刁轩
受保护的技术使用者:上海博疆智能科技有限公司
技术研发日:20231014
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!