料箱转运装置和具有其的搬运机器人的制作方法
本技术涉及物流设备,尤其涉及一种料箱转运装置和具有其的搬运机器人。
背景技术:
1、搬运机器人通常设有举升门架,举升门架可驱动料箱转运装置上下升降,并且,举升门架旁设有多层的机器人储位,这样,搬运机器人通过上下升降的料箱转运装置即可实现料箱的出库和入库。
2、相关方案中,对于料箱转运装置而言,在沿水平的一个方向上,其可实现料箱在货架与自身之间的转运,然后,在沿垂直的另一个水平方向上,其可实现料箱在自身与机器人储位之间的转运;可以看到,在货架与机器人储位之间的转运过程由于会涉及料箱的垂直转向,料箱转运装置通常是通过设置额外的转向机构来实现上述垂直转向的。
3、然而发现,针对料箱的垂直转向,料箱转运装置设置额外的转向机构会造成结构复杂、成本较高等问题。
技术实现思路
1、针对上述技术问题的至少一个方面,本技术实施例提供了一种料箱转运装置和具有其的搬运机器人,料箱转运装置的一对滑动安装的驱动板通过凸轮顶升结构可驱动相对辊筒呈平行设置的若干输送皮带在不同的高度位置之间升降,从而通过可升降地输送皮带即可实现料箱沿垂直于辊筒输送方向的转运,结构简单,不必设置额外的转向机构,成本较低。
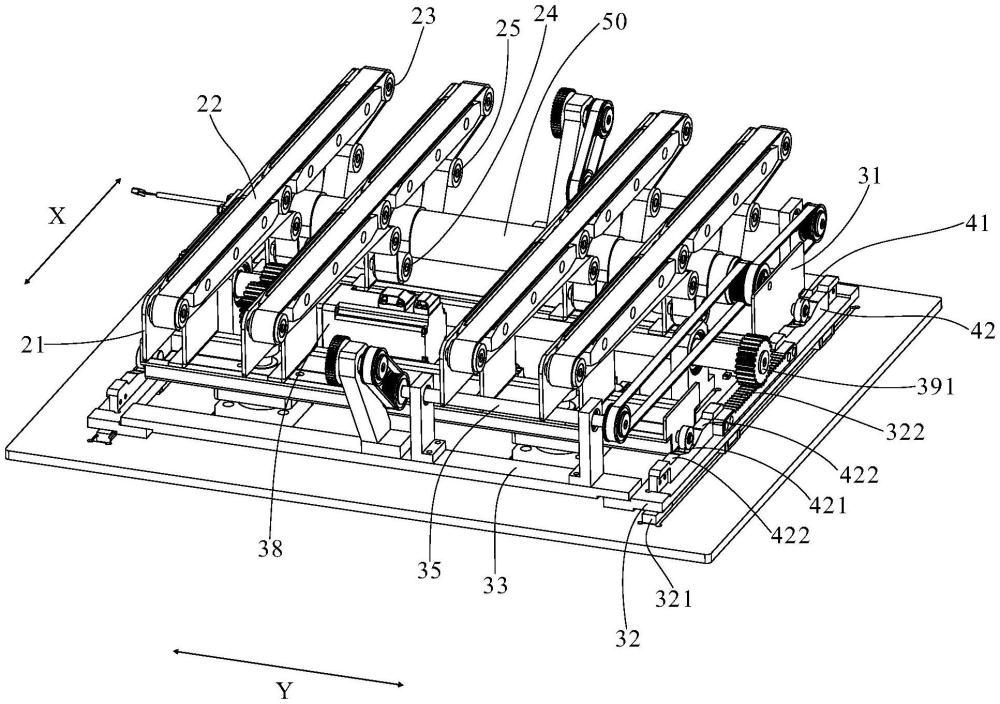
2、第一方面,本技术实施例提供一种料箱转运装置,所述料箱转运装置包括:
3、装置壳体,所述装置壳体的底部设有若干平行排列的辊筒,所述辊筒沿第一方向设置;
4、若干转运皮带组件,所述转运皮带组件与所述辊筒平行设置并位于相邻的一对所述辊筒之间,所述转运皮带组件包括沿所述第一方向延伸的皮带支架和安装于所述皮带支架的输送皮带;
5、升降驱动组件,包括至少一个支撑板,所述支撑板沿与所述第一方向垂直的第二方向延伸,所述支撑板用于供若干所述皮带支架同时固定安装;
6、在对应所述支撑板沿所述第二方向两端的位置,所述升降驱动组件还包括一对平行排列的驱动板,所述驱动板沿所述第一方向延伸,所述驱动板配置为沿所述第一方向可相对滑动地安装于所述装置壳体的底板;
7、其中,所述驱动板与所述支撑板的端部之间通过凸轮顶升结构传动连接,以使得在沿所述第一方向相对所述底板滑动时,所述驱动板通过所述凸轮顶升结构驱动所述输送皮带在高于所述辊筒的第一高度位置和低于所述辊筒的第二高度位置之间升降;
8、并且,所述支撑板上还设有动力转轴,所述动力转轴沿所述第二方向延伸,所述动力转轴配置为同时驱动若干所述输送皮带转动,以使所述输送皮带在所述第一高度位置时用于沿所述第一方向转运料箱。
9、在一实施例中,优选地,一对所述驱动板的至少一端之间通过连接板固定连接;
10、其中,所述连接板上固定安装有对接齿轮,所述对接齿轮的转轴沿所述第二方向设置,所述动力转轴还与所述对接齿轮传动连接,以使在所述驱动板沿所述第一方向滑动时,所述对接齿轮用于与机器人储位的输送带传动连接。
11、在一实施例中,优选地,一对所述驱动板的两端均设有所述连接板。
12、在一实施例中,优选地,所述连接板上固定安装有第一传动转轴,所述第一传动转轴沿所述第二方向延伸,所述第一传动转轴的一端通过第一传动皮带与所述动力转轴传动连接,所述第一传动转轴的另一端通过第二传动皮带与所述对接齿轮传动连接。
13、在一实施例中,优选地,所述升降驱动组件还包括第一驱动电机和与所述第一驱动电机传动连接的第二传动转轴;
14、其中,所述第一驱动电机固定安装于所述底板;
15、所述驱动板通过沿所述第一方向设置的第一直线导轨滑动安装于所述底板,所述驱动板的顶端设有沿所述第一方向延伸的第一传动齿条,
16、所述第二传动转轴沿所述第二方向设置,所述第二传动转轴沿所述第二方向的两端部分别固定有第一传动齿轮,所述第一传动齿轮与所述第一传动齿条啮合连接,以使所述第一驱动电机通过所述第二传动转轴同时驱动一对所述驱动板相对所述底板滑动。
17、在一实施例中,优选地,所述凸轮顶升结构包括滚子和凸轮平板;
18、其中,所述支撑板沿所述第二方向的两端部分别设有所述滚子,所述驱动板的顶端固定安装所述凸轮平板,所述凸轮平板沿所述第一方向延伸,所述凸轮平板的上端面包括凹槽部分和设于所述凹槽部分两侧的凸起部分,以使所述滚子在所述凹槽部分时,所述输送皮带位于所述第二高度位置,所述滚子在任一所述凸起部分时,所述输送皮带位于所述第一高度位置。
19、在一实施例中,优选地,在所述支撑板的投影区域,所述底板安装有限位导柱,所述限位导柱沿竖直方向设置,所述支撑板设有供所述限位导柱穿过的限位通孔。
20、在一实施例中,优选地,若干所述皮带支架同时固定安装于一对平行排列的所述支撑板;其中,所述动力转轴安装于任一所述支撑板。
21、在一实施例中,优选地,所述皮带支架沿所述第一方向的两端分别安装有第一惰轮,所述输送皮带呈周向封闭的安装于一对所述第一惰轮;
22、其中,在所述输送皮带所围区域的内部,所述皮带支架还安装有一对第二惰轮,一对所述第二惰轮分设于所述动力转轴的两侧;
23、沿竖直方向,一对所述第二惰轮和所述动力转轴的相互高度配置为所述输送皮带位于一对所述第二惰轮之间的部分形成向上凸起的弧形,以使所述动力转轴通过摩擦力驱动所述输送皮带转动;
24、并且,所述皮带支架可拆卸地安装于所述支撑板。
25、在一实施例中,优选地,在所述输送皮带所围区域的外部,所述皮带支架还安装有一对张紧惰轮,一对所述张紧惰轮分设于一对所述第二惰轮的相对外侧。
26、在一实施例中,优选地,所述料箱转运装置还包括:
27、双向取放货组件,所述双向取放货组件包括沿所述第二方向延伸的固定板和伸缩板,所述固定板与所述伸缩板之间通过沿所述第二方向延伸的第二直线导轨滑动连接;
28、其中,所述固定板固定安装于所述装置壳体的顶部,所述固定板上安装有第二驱动电机,所述第二驱动电机的输出轴固定有第二传动齿轮;
29、所述伸缩板设于所述固定板的下端,所述伸缩板设有沿所述第二方向延伸的第二传动齿条,所述伸缩板沿所述第二方向的两端分别设有拨叉;
30、所述第二传动齿轮与所述第二传动齿条啮合连接,以使所述第二驱动电机用于驱动所述伸缩板沿所述第二方向双向伸缩。
31、在一实施例中,优选地,所述伸缩板包括沿所述第二方向滑动连接的一级伸缩板和二级伸缩板,所述一级伸缩板通过所述第二直线导轨滑动安装于所述固定板,所述二级伸缩板位于所述一级伸缩板的下端,所述固定板与所述二级伸缩板之间通过第一倍速皮带和第二倍速皮带传动连接;其中,
32、所述第一倍速皮带的一对第一固定端分别固定于所述固定板和所述二级伸缩板沿所述第二方向的一端;
33、所述第二倍速皮带的一对第二固定端分别固定于所述固定板和所述二级伸缩板沿所述第二方向的另一端。
34、第二方面,本技术实施例提供一种搬运机器人,所述搬运机器人包括底盘单元和设于所述底盘单元的举升门架单元,所述举升门架单元竖直升降地安装有料箱转运装置;
35、沿第一方向,所述举升门架单元的一侧或两侧固定有呈多层设置的机器人储位;
36、所述料箱转运装置包括:
37、装置壳体,竖直升降地安装于所述举升门架单元,所述装置壳体的底部设有若干平行排列的辊筒,所述辊筒沿第一方向设置;
38、若干转运皮带组件,所述转运皮带组件与所述辊筒平行设置并位于相邻的一对所述辊筒之间,所述转运皮带组件包括沿所述第一方向延伸的皮带支架和安装于所述皮带支架的输送皮带;
39、升降驱动组件,包括至少一个支撑板,所述支撑板沿与所述第一方向垂直的第二方向延伸,所述支撑板用于供若干所述皮带支架同时固定安装;
40、在对应所述支撑板沿所述第二方向两端的位置,所述升降驱动组件还包括一对平行排列的驱动板,所述驱动板沿所述第一方向延伸,所述驱动板配置为沿所述第一方向可相对滑动地安装于所述装置壳体的底板;
41、其中,所述驱动板与所述支撑板的端部之间通过凸轮顶升结构传动连接,以使得在沿所述第一方向相对所述底板滑动时,所述驱动板通过所述凸轮顶升结构驱动所述输送皮带在高于所述辊筒的第一高度位置和低于所述辊筒的第二高度位置之间升降;
42、并且,所述支撑板上还设有动力转轴,所述动力转轴沿所述第二方向延伸,所述动力转轴配置为同时驱动若干所述输送皮带转动,以使所述输送皮带在所述第一高度位置时用于将料箱在所述机器人储位与所述装置壳体之间转运。
43、本技术实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:
44、本技术实施例提供了一种料箱转运装置和具有其的搬运机器人,料箱转运装置包括装置壳体和若干转运皮带组件,装置壳体的底部设有若干辊筒,转运皮带组件与辊筒平行设置并位于相邻的一对辊筒之间;其中,若干转运皮带组件的若干皮带支架同时固定于支撑板,支撑板与辊筒垂直设置,在支撑板的两端,装置壳体的底板设有一对平行排列的驱动板,驱动板滑动安装于底板,驱动板与支撑板的两端部之间通过凸轮顶升结构传动连接;可理解的,这样,在驱动板相对底板滑动时,其可通过凸轮顶升结构驱动转运皮带组件的输送皮带在不同高度位置之间升降,进而,相对辊筒可升降的输送皮带在升起时即可实现料箱沿垂直于辊筒输送方向的转运。
45、也即是说,针对料箱转运装置上料箱需要进行的的垂直转向,本实施例通过设置相对辊筒可升降的若干输送皮带即可实现,从而不必额外增设转向机构,解决了由于设置额外的转向机构时造成的结构复杂、成本较高的技术问题。
46、此外,可理解的,本实施例中用于驱动转运皮带组件(或者说输送皮带)升降的升降驱动组件具有较高的可扩展性,其可通过增设对接齿轮从而实现与机器人储位的传动对接,从而结构简单、节省料箱的转运动力装置。
- 还没有人留言评论。精彩留言会获得点赞!