吊装式物资转运机器人的制作方法
本技术属于转运机器人,尤其涉及吊装式物资转运机器人。
背景技术:
1、目前,物资包括自带托盘的物体和不带托盘的物体,自带托盘的物体是容易转运的,一般是利用叉车将托盘叉起,进而利用叉车进行转运,但不带托盘的物体是不容易抬升和转运的,利用叉车也很难将这类物体叉起,一般都是利用人力将物体搬运在叉车上,在利用叉车进行转运。
技术实现思路
1、本技术为了解决上述问题,本技术提供吊装式物资转运机器人。
2、本技术的目的是提供吊装式物资转运机器人,本技术以机架作为支撑提升带、旋转板的基础,依靠能够移动的移动轮,使得待吊装物体进入两块限位挡板之间,旋转板的下方、推板的一侧,根据光栅组对待吊装物体的尺寸测量,本技术依靠旋转板带动推动装置转动,使得推动装置能够从待吊装物体的两侧推动带吊装物体,由推动装置带动推板运动进而推动待吊装的物体,使得物体下端与地面产生缝隙,该缝隙需要保证提升带能够顺利通过,由转动轮推动提升带运动,使得两根提升带穿设在物体下端,提升带上的磁吸运动头相互配合使得两根提升带连成一根,经过两次反复运作,再由驱动电机带动转动轮转动,实现待吊装物体的抬升,进而实现无托盘物资的转运。
3、为实现本技术的目的,本技术的技术方案为:
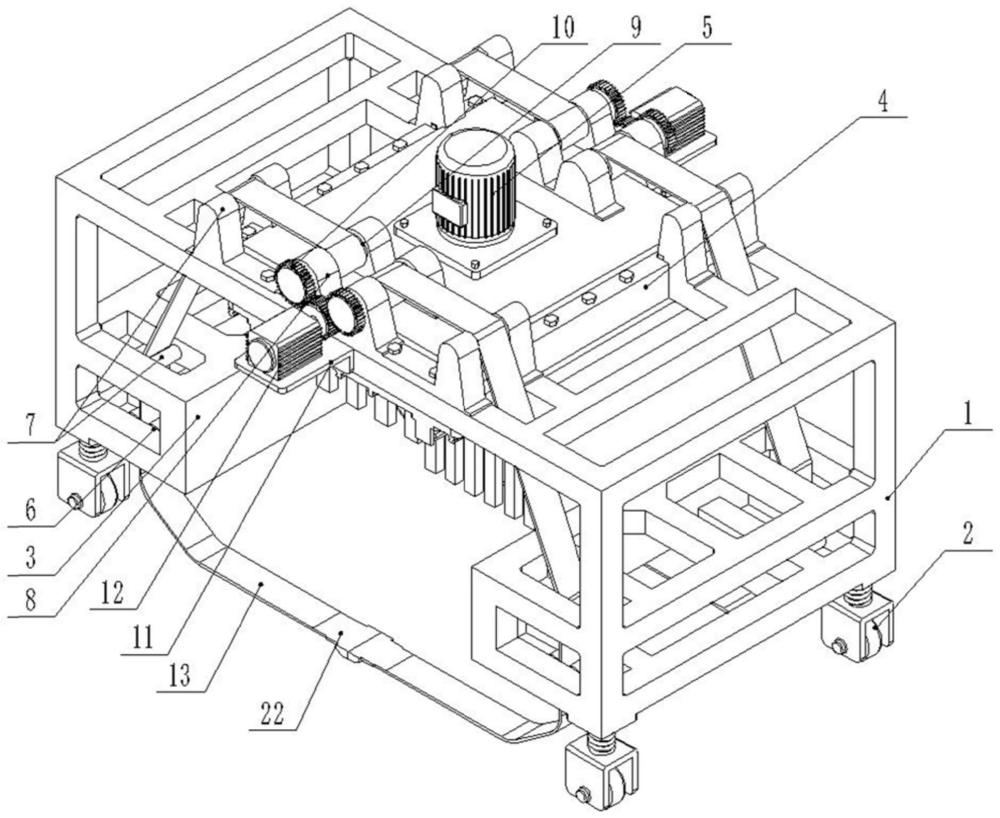
4、吊装式物资转运机器人,包括机架,机架上设置有旋转运动旋转板,旋转板上设置有推动装置,推动装置偏心的安装在旋转板上,推动装置的输出轴上设置有推板,旋转板远离推动装置的一端设置有配重块,机架上端设置有驱动电机,驱动电机的输出轴上设置有驱动轮,机架上设置有关于驱动电机中心对称布置的两组支撑座,支撑座上铰接设置有转动轮,转动轮上设置有从动轮,驱动轮与从动轮配合,由驱动轮带动从轮动转动,机架下方设置有提升带,提升带的一端连接转动轮,提升带的另一端设置有相互配合的磁吸运动头,机架下端设置有能够进行万向驱动运动的移动轮,本技术依靠旋转板带动推动装置转动,由推动装置推动待吊装的物体,使得物体下端与地面产生缝隙,由转动轮推动提升带运动,使得两根提升带穿设在物体下端,提升带上的磁吸运动头相互配合使得两根提升带连成一根,经过两次反复运作,再由驱动电机带动转动轮转动,实现待吊装物体的抬升,进而实现无托盘物资的转运。
5、进一步的,机架上端设置有顶支撑板,旋转板位于顶支撑板下方,顶支撑板上设置有旋转电机,旋转电机的输出轴穿过顶支撑板与旋转板连接,机架上端设置有横撑,顶支撑板固定在横撑上端。
6、进一步的,推动装置包括第一推动装置和第二推动装置,第一推动装置的输出轴上设置有第一推板,第二推动装置的输出轴上设置有第二推板,第一推板上设置有多根间隔布置的第一分离齿,第二推板上设置有多根间隔布置的第二分离齿,推板上端设置有第一滑块组,旋转板下端设置有导轨,第一滑块组滑动设置在导轨上,本技术将推动装置分为两组,使得两组推动装置可以分别推动待吊装物品,也可以分组推动待吊装物体的某部分,实现部分异形物体的推动。
7、进一步的,从动轮为从动齿轮,驱动轮为驱动齿轮,从动齿轮对称布置在驱动齿轮的两侧,从动齿轮与驱动齿轮啮合配合,机架上设置有并列辊组,并列辊组包括至少两根平行布置的平行辊体,提升带布置在平行辊体之间,并列辊组上方设置有至少两处导向辊组,第一处导向辊组位于并列辊组的正上方,第二处导向辊组位于并列辊组的斜上方,第二处导向辊组靠近支撑座,导向辊组包括导向辊体,导向辊体与机架铰接连接,导向辊体与提升带内周接触。
8、进一步的,磁吸运动头包括连接头,连接头与提升带固定连接,连接头远离提升带的一端设置有主体,主体上端设置有防滑面,主体远离连接头一端设置有电磁铁,电磁铁的连接线布置在提升带上,连接线与电源、控制器电性连接,主体下端设置有多个间隔布置的辅助滚轮。
9、进一步的,主体包括相互连接的第一连接板和第二连接板,第一连接板、第二连接板的上端面为防滑面,第一连接板与连接头连接,第二连接板与电磁铁连接,第一连接板的下端设置有测距传感器,测距传感器的探头向下布置,测距传感器与控制器电性连接。
10、进一步的,第二连接板下端设置有倾斜面,倾斜面靠近第一连接板,倾斜面上固定设置多组间隔布置的滚轮支撑,滚轮支撑靠近第二连接板的侧面边缘,滚轮支撑上铰接设置有辅助滚轮,辅助滚轮与地面接触时,测距传感器始终与地面不接触,本技术利用磁吸运动头上的电磁铁实现两个磁吸运动头的配合,主体上方的防滑面能够阻止待吊装物体的滑动,主体下方的辅助滚轮能够与地面接触并达到依靠轻微的力便可驱动磁吸运动头移动的效果,主体下方布置的测距传感器用来检测主体与地面的距离,进而判断提升带和待吊装物体是否远离地面且远离地面的距离。
11、进一步的,顶支撑板下端设置有环形滑轨,旋转板的上端设置有第二滑块组,第二滑块组包括多块滑动安装在环形滑轨上的第二滑块。
12、进一步的,机架上设置有内支撑杆,内支撑杆位于旋转板的下方,内支撑杆上设置有限制挡板,限位挡板位于推板的两侧,在旋转板转动时,旋转板、推板均不与限位挡板接触,限位挡板上设置有横向布置和竖向布置的光栅组,光栅组与控制器电性连接,控制器被设定为根据光栅与待吊装物体的感应数据确定推板的推动量,感应数据为光栅对待吊装物体的检测高度、长度,本技术利用限位挡板限制物品的位移,在物品发生倾斜等情况时,限位挡板也能够对物品进行支撑,在限位挡板上布置的光栅组能够检测待吊装物体的尺寸,为推板的运动等提供参数支持。
13、进一步的,第一推板上的第一分离齿的长度、间隔距离与第二推板上的第二分离齿的长度、间隔距离不同,所述第一推动装置对第一推板的推动距离与第二推动装置对第二推板的推动距离不同。
14、与现有技术相比,本技术的有益效果为:
15、1、本技术以机架作为支撑提升带、旋转板的基础,依靠能够移动的移动轮,使得待吊装物体进入两块限位挡板之间,旋转板的下方,推板的一侧,根据光栅组对待吊装物体的尺寸测量,本技术依靠旋转板带动推动装置转动,使得推动装置能够从待吊装物体的两侧推动带吊装物体,由推动装置带动推板运动进而推动待吊装的物体,使得物体下端与地面产生缝隙,该缝隙需要保证提升带能够顺利通过,由转动轮推动提升带运动,使得两根提升带穿设在物体下端,提升带上的磁吸运动头相互配合使得两根提升带连成一根,经过两次反复运作,再由驱动电机带动转动轮转动,实现待吊装物体的抬升,进而实现无托盘物资的转运。
16、2、本技术的磁吸运动头能够相互配合且需要相互配合使用,本技术利用磁吸运动头上的电磁铁实现两个磁吸运动头的配合,将电磁铁通电后,电磁铁能够互相吸引在一起,使得两根提升带组合成一根整体的提升带,主体上方的防滑面能够阻止待吊装物体的滑动,主体下方的辅助滚轮能够与地面接触并达到依靠轻微的力便可驱动磁吸运动头移动的效果,主体下方布置的测距传感器用来检测主体与地面的距离,进而判断提升带和待吊装物体是否远离地面且远离地面的距离,另外,本技术依靠并列辊组和导向辊体辅助提升带运动,进而实现提升带向转动轮方向运动的导向性和稳定性,并列辊组和导向辊体也能够对提升带的关键位置进行支撑和导向,保证提升带运动的稳定性。
17、3、本技术利用限位挡板限制物品的位移,在物品发生倾斜等情况时,限位挡板也能够对物品进行支撑,在限位挡板上布置的光栅组能够检测待吊装物体的尺寸,为推板的运动等提供参数支持。
18、4、本技术将推动装置分为两组,使得两组推动装置可以分别推动待吊装物品,也可以分组推动待吊装物体的某部分,实现部分异形物体的推动,推板的设计也存在差异化,两者的推动距离、分离齿的长度、间隔距离均不同,进而实现满足待吊装物体的推动。
- 还没有人留言评论。精彩留言会获得点赞!