一种仓储机器人的制作方法
本技术涉及仓储机器人,尤其涉及一种仓储机器人。
背景技术:
1、随着科技的不断进步,自动化设备在各行各业得到了广泛应用,包括烟草工厂。仓储机器人是一种能够自主完成货物存储、管理和搬运等任务的机器人。在烟草工厂中,仓储机器人可以自动化地完成烟草产品的存储、分类、调度和运输等任务,提高了生产效率和品质,同时也减少了人工成本和劳动强度。
2、在目前的相关技术中,仓储机器人通常会配备夹持机构,用于实现对货物料箱的取放。用于放置货物的料箱通常为顶部开放,四周和底部封闭,仓储机器人通过夹持料箱的侧壁或托持料箱的底部,来实现对料箱的取放与搬运。
3、在烟草生产的过程中,用于存放烟棒的料箱(如图22所示),其除了顶部开放外,还有一个侧壁也为开放状态。因此,在对这种类型的料箱进行取放和搬运时,目前仓储机器人的夹持机构未考虑到这种情况,无法很好的适应对这种类型料箱的夹持与搬运工作,在搬运时存在烟棒掉落的情况。此外,对于这种存放烟棒的料箱,一般为多个料箱一起竖直并排放置,目前仓储机器人的夹持机构在搬运时每次只能完成取放一个货箱,搬运的效率较低。
技术实现思路
1、为解决或部分解决相关技术中存在的问题,本技术提供一种仓储机器人,该仓储机器人能够适应存放烟棒料箱的搬运工作,适应不同高度货架的搬运任务,并且能够实现多个料箱的同时取放和搬运,提高搬运效率。
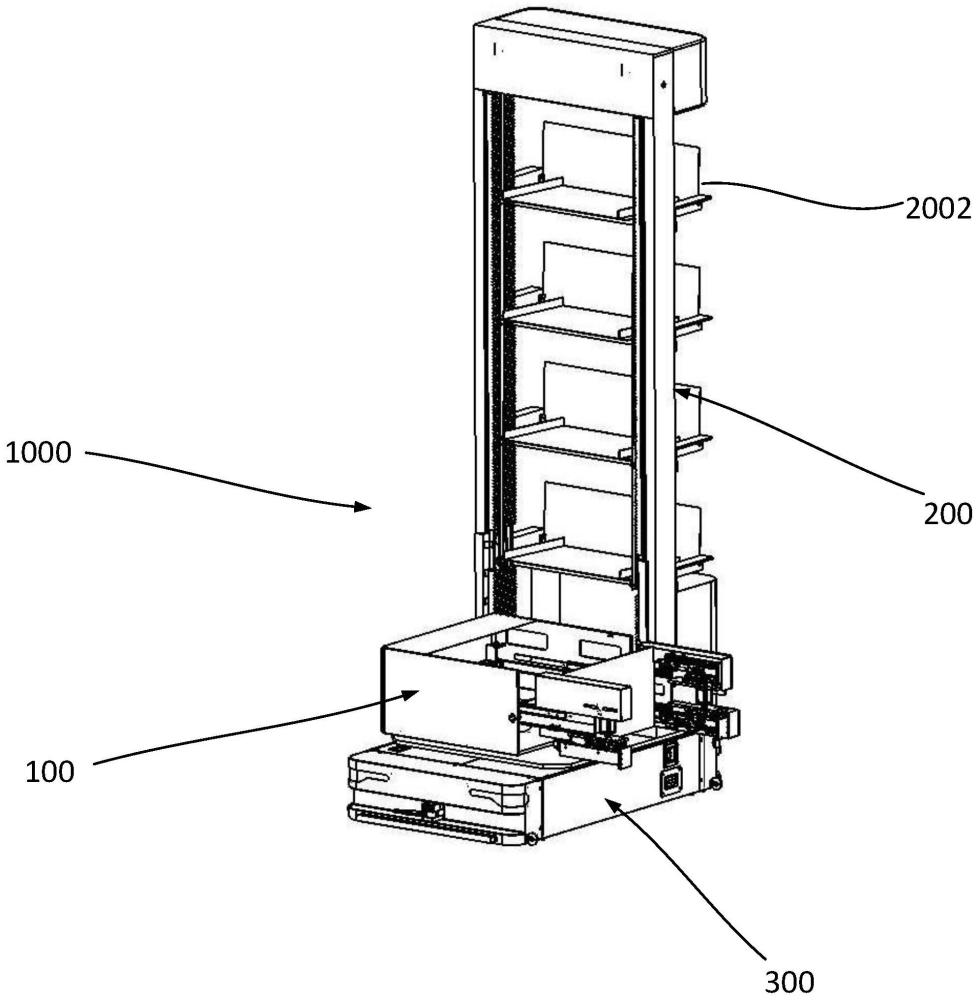
2、本技术第一方面提供一种仓储机器人,包括:移动底座装置、提升装置、旋转装置和夹抱装置。该提升装置设置安装于移动底座装置上,旋转装置设置安装于提升装置上,夹抱装置设置安装于旋转装置上。该移动底座装置为一个agv小车,能够自主运动并完成货物的自动化搬运任务,该提升装置为一个由电机驱动的龙门提升架,能够实现货物的上升和下降,以适应不同高度货架的搬运任务。
3、可选的,在第一方面的一些实施方式中,该提升装置上设置有四个直角置物板,各个直角置物板均通过提升固定板和提升固定横杆固定在提升装置上,且直角置物板与提升固定板为铰接固定;在提升装置顶部设置有两个提升电缸,两个提升电缸分别通过一根提升直杆与各个直角置物板的侧壁固定连接。
4、可选的,在第一方面的一些实施方式中,该旋转装置包括:旋转电机、主动齿轮、从动齿轮、旋转轴承和旋转皮带轮,旋转电机设置安装于提升装置的提升支架上,主动齿轮与旋转电机的输出轴相连接,旋转轴承设置安装于提升装置的底部,从动齿轮设置安装于旋转轴承的外侧,旋转皮带轮与主动齿轮和从动齿轮啮合连接;夹抱装置的底部设置有对应旋转轴承的通孔,夹抱装置穿过旋转轴承与从动齿轮固定连接。
5、可选的,在第一方面的一些实施方式中,该夹抱装置包括:左右夹抱机构、前后夹抱机构和货叉移载机构,该左右夹抱机构和前后夹抱机构设置安装于货叉移载机构上;
6、该左右夹抱机构包括:左夹臂和右夹臂,该左夹臂与右夹臂的组成构造相同,左夹臂与右夹臂分别设置安装于货叉移载机构的左右两侧;
7、该左夹臂包括:夹紧调节机构、上夹紧机构和下夹紧机构,该上夹紧机构和下夹紧机构的组成构造相同,上夹紧机构和下夹紧机构分别设置安装于夹紧调节机构的顶部与底部;
8、该夹紧调节机构包括:第一固定支架、夹紧电机、第一轴承座和第一导轨,该夹紧电机设置安装于第一固定支架上,夹紧电机的两端输出轴上各设置有一个锥齿轮,该第一轴承座设置有四个,第一固定支架的顶部与底部各两个,通过在两个第一轴承座之间安装第一螺杆,并在第一螺杆上设置安装有一个锥齿轮与一个第一连接块,该夹紧电机的两端输出轴上的锥齿轮分别与两个第一轴承座上的锥齿轮啮合连接;该第一导轨设置有四个,第一固定支架的顶部与底部各设置安装两个;
9、该上夹紧机构包括:第二固定支架、调节电机、调节丝杆、第二轴承座、第二导轨、第一夹紧板、第二夹紧板和第三夹紧板,该第二固定支架与位于第一固定支架顶部的第一导轨固定连接,该调节电机设置安装于第二固定支架上,该调节丝杆通过第二轴承座安装于第二固定支架上,调节丝杆的一端与调节电机的输出轴相连接,该第二导轨设置安装于第二固定支架上,且第二导轨与调节丝杆平行设置,该第一夹紧板设置安装于第二固定支架上,该第二夹紧板与第三夹紧板分别设置安装于调节丝杆上,与调节丝杆之间螺纹连接,第二夹紧板与第三夹紧板的底部还固定连接于第二导轨上;
10、该前后夹抱机构包括:第三固定支架、前后夹抱电缸和夹抱挡板,该前后夹抱电缸设置安装于第三固定支架上,夹抱挡板设置安装于前后夹抱电缸的输出轴顶部,第三固定支架的左右侧壁上设置有至少一个第三导轨,夹抱挡板的左右侧壁分别与第三固定支架左右侧壁的第三导轨连接固定。
11、可选的,在第一方面的一些实施方式中,该第一夹紧板、第二夹紧板和第三夹紧板均设置安装有夹抱条块,夹抱条块为橡胶材质。
12、可选的,在第一方面的一些实施方式中,该上夹紧机构的第二固定支架上设置安装有第一检测片,该第一固定支架上设置有两个第一光电传感器;
13、可选的,在第一方面的一些实施方式中,该左右夹抱机构还包括保护外壳,该保护外壳设置有两个,两个保护外壳分别设置安装于左夹臂和右夹臂上。
14、可选的,在第一方面的一些实施方式中,该货叉移载机构包括:第四固定支架、滑轨、移载电机、传动杆、轴承座、转动皮带轮和连接板;
15、该滑轨设置有两个,两个滑轨分别设置安装于第四固定支架的左右内壁上,两个滑轨均与第一固定支架和第三固定支架相连接固定,该移载电机设置安装于第四固定支架上,该传动杆通过轴承座设置安装于第四固定支架上,传动杆的一端与移载电机的前端输出轴相连接。移载电机的后端输出轴上设置安装有第一皮带齿轮,传动杆的另一端设置安装有第二皮带齿轮,第四固定支架的左右内壁上分别设置安装有第三皮带齿轮和第四皮带齿轮,转动皮带轮设置有两根,一根转动皮带轮连接第一皮带齿轮和第三皮带齿轮,另一根转动皮带轮连接第二皮带齿轮和第四皮带齿轮,且其中一根转动皮带轮通过连接板与第三固定支架固定连接。
16、可选的,在第一方面的一些实施方式中,该第三固定支架上设置有第三检测片,该第四固定支架上设置有第三光电传感器。
17、本技术第一方面提供的技术方案可以包括以下有益效果:
18、本技术通过设置左右夹抱机构,通过控制驱动夹紧电机,能够带动上夹紧机构和下夹紧机构进行运动,以此实现对料箱的左右夹紧,确保料箱在搬运过程中不会滑落或倾斜,提高搬运安全性,同时,通过设置第一夹紧板、第二夹紧板和第三夹紧板,能够实现对多个料箱的搬运,提高了搬运效率;
19、本技术通过设置前后夹抱机构,通过控制前后夹抱电缸,能够带动夹抱挡板进行运动,以此实现对料箱顶部的封闭,避免在搬运过程中料箱中的物料散落,进一步提高了搬运安全性。
20、本技术通过设置夹抱条块,可以增加夹紧板的夹紧力度,防止料箱在搬运过程中滑动或摆动。同时,橡胶材质的夹抱条块具有较好的耐磨性和抗冲击性,能够更好地适应料箱的搬运。
21、本技术通过设置第一检测片和两个第一光电传感器,能够用以检测上夹紧机构和下夹紧机构的运动状态,保障搬运的稳定性。
22、本技术通过设置保护外壳,能够保护夹抱装置,避免夹抱装置受到外界的损害和影响,同时避免操作人员因接触到夹抱装置而受到伤害。
23、本技术通过设置货叉移载机构,通过驱动移载电机可以通过传动杆和皮带轮的传动方式,驱动左右夹抱机构和前后夹抱机构在滑轨上进行移动,从而实现对货架上料箱的夹抱转移和搬运。
24、本技术通过设置第三检测片和第三光电传感器,能够用以检测第三固定支架的运动状态,保障料箱的夹抱转移和搬运的正常运行。
25、本技术通过采用agv小车的自主移动技术,实现无人值守的自动化搬运任务,提高了搬运效率和精度,通过设置提升装置,可以实现货物的上升和下降,以适应不同高度货架的搬运任务,通过设置旋转装置,可以实现货物的旋转,适应不同方向的搬运任务,通过将夹抱装置设置在旋转装置上,可以通过夹抱的方式来搬运烟棒料箱,保障搬运的稳定性和安全性。
26、本技术通过在提升装置上设置直角置物板,能够更好的适应烟棒料箱的搬运,且通过驱动提升电缸,能够将直角置物板倾斜,保障搬运的稳定性。
27、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本技术。
- 还没有人留言评论。精彩留言会获得点赞!