一种智能化的餐厨垃圾分拣处理机器人的制作方法
本发明涉及餐厨垃圾处理,具体为一种智能化的餐厨垃圾分拣处理机器人。
背景技术:
1、餐厨垃圾主要包括厨房用瓶罐、果蔬垃圾以及剩菜垃圾等,其中果蔬垃圾和剩菜垃圾等大都会事先用垃圾袋装好,再丢入垃圾桶内,其中果蔬垃圾和剩菜垃圾可以进行回收利用,达到节能环保的目的,而装有垃圾袋的果蔬垃圾和剩菜垃圾,需要对垃圾袋进行分离,避免垃圾袋影响果蔬垃圾和剩菜垃圾的回收使用效果,减少污染,随着智能化机器人的发展,采用智能化垃圾分拣处理机器人对垃圾进行分拣是现有的常规手段,可以极大节省劳动力,提高分拣效率,但是现有的智能化垃圾分拣处理机器人在使用时存在以下问题:
2、针对袋装可回收垃圾的处理,大都需要将垃圾袋进行破袋和分拣回收处理,但是由于袋装垃圾的容量不同,进而其体积也不同,现有的智能化垃圾分拣处理机器人,不方便对不同体积的垃圾袋进行稳定的破袋处理,大都是直接破碎,垃圾袋的碎屑容易混杂在餐厨垃圾内,仍然存在污染的风险,同时现有的智能化垃圾分拣处理机器人,不方便对垃圾袋和餐厨垃圾进行稳定分离,垃圾袋和餐厨垃圾需要分别放置,破碎后堆在一起,后续仍然需要进行分离操作,导致分拣处理效果较差。
3、针对上述问题,急需在原有智能化垃圾分拣处理机器人的基础上进行创新设计。
技术实现思路
1、本发明的目的在于提供一种智能化的餐厨垃圾分拣处理机器人,以解决上述背景技术提出现有的智能化垃圾分拣处理机器人,不方便对不同体积的垃圾袋进行稳定的破袋处理,同时不方便对垃圾袋和餐厨垃圾进行稳定分离的问题,本发明技术方案针对现有技术解决方案过于单一的技术问题,提供了显著不同于现有技术的解决方案。
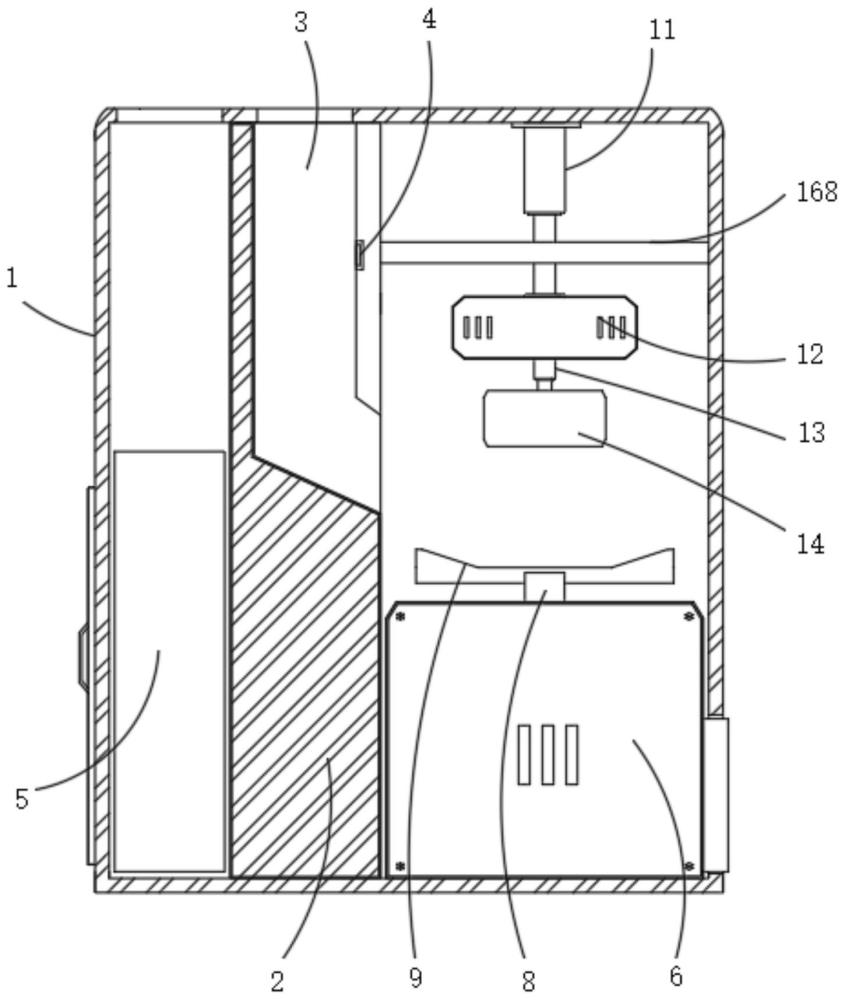
2、为实现上述目的,本发明提供如下技术方案:一种智能化的餐厨垃圾分拣处理机器人,包括机器人本体,所述机器人本体内通过隔板被分隔成两个空腔,且隔板左右两侧空腔下方分别设置有第一收集箱和第二收集箱,并且第二收集箱前后位置处均设置有第三收集箱,所述第一收集箱、第二收集箱和第三收集箱内均设置有抽出式抽屉,所述隔板的顶部开设有放料通道,且放料通道的内壁上固定有光电传感器;
3、还包括第一弹性伸缩杆,所述第一弹性伸缩杆固定在第二收集箱的前后侧壁上,且第一弹性伸缩杆的顶部连接有安装杆,并且两个安装杆顶部的内壁上通过扭簧弹性转动安装有承接板,所述安装杆内和第二收集箱之间设置有单向翻转组件,且单向翻转组件用于实现承接板的单向翻转,所述机器人本体右侧空腔内部的顶部固定有第一电动推杆,且第一电动推杆的输出端连接有安装座,所述安装座的底部嵌入式安装有第二电动推杆,且第二电动推杆的输出端连接有切割刀,所述安装座的前后两侧嵌入式转动安装有夹袋杆;
4、位置调整组件,所述位置调整组件设置在安装座内,所述位置调整组件用于根据袋装垃圾的大小调整夹袋杆的转动位置;
5、分袋组件,所述分袋组件设置在安装座和夹袋杆内,所述分袋组件用于对垃圾袋进行夹紧和收集;
6、夹袋位置变化组件,所述夹袋位置变化组件设置在安装座内,所述夹袋位置变化组件用于调整对垃圾袋进行夹取的位置。
7、优选的,所述单向翻转组件包括翻转齿辊,所述翻转齿辊转动设置在安装杆的底部外侧,且翻转齿辊的一端位于竖槽内,并且竖槽开设在第二收集箱的前后内侧壁上,所述翻转齿辊一侧啮合有翻转齿条,且翻转齿条固定在竖槽的内壁上,所述翻转齿辊通过皮带啮合有齿套,且齿套嵌入式转动设置在安装杆顶部的内部,所述齿套与承接板侧边轴杆之间连接有棘轮组件。
8、优选的,所述位置调整组件包括安装板,所述安装板固定在机器人本体右侧空腔内,且安装板的底部固定有第三电动推杆,所述第三电动推杆的输出端连接有推板,且推板的底部两侧固定有调整齿条,所述调整齿条贯穿设置在安装座内,且调整齿条的外侧啮合有调整齿辊,所述调整齿辊转动设置在安装座内,且调整齿辊与夹袋杆的顶部相连接。
9、优选的,所述分袋组件包括调节槽,所述调节槽开设在安装座的内部,且调节槽的下方限位滑动设置有夹紧齿条,并且调节槽的顶部固定有放松齿条,所述夹紧齿条和放松齿条均啮合设置有分袋齿辊,且分袋齿辊转动设置在夹袋杆的外侧,所述分袋齿辊通过皮带连接有螺杆,且螺杆转动设置在活动槽内,并且活动槽开设在夹袋杆的底部,所述螺杆上螺纹套设有两个夹板。
10、优选的,所述夹紧齿条和放松齿条均设计为弧形结构,且夹紧齿条和放松齿条与调整齿辊共中心轴。
11、优选的,所述夹紧齿条和放松齿条上均等角度开设有收缩槽,且收缩槽内通过扭簧弹性转动设置有齿块,并且齿块与分袋齿辊相啮合。
12、优选的,所述齿块在收缩槽内单向转动,所述夹紧齿条和放松齿条上齿块单向转动反向相反。
13、优选的,所述螺杆的两端螺纹方向相反,且螺杆上两个夹板在活动槽内对向滑动,并且两个夹板的底部均设计为“l”字形结构。
14、优选的,所述夹袋位置变化组件包括推送杆,所述推送杆固定在调整齿条的内侧,所述推送杆的顶部固定有第一活塞板,且第一活塞板位于第一油液腔内,所述第一油液腔通过管道连接有第二油液腔,且第二油液腔和第一油液腔均开设在安装座的内部,所述第二油液腔内通过第二弹性伸缩杆连接有第二活塞板,且第二活塞板的外侧固定有活动杆,并且活动杆的一端固定在夹紧齿条上。
15、优选的,所述第二油液腔和第二弹性伸缩杆均设计为弧形结构,且第二油液腔和第二弹性伸缩杆的弧度与调节槽的弧度一致。
16、与现有技术相比,本发明的有益效果是:
17、1.本发明,将袋装垃圾通过机器人本体顶部开口投入放料通道内,由光电传感器对垃圾袋的体积进行检测,而后通过后台控制器控制第三电动推杆的运行,改变调整齿条的位置,使得安装座在下移时,可以通过调整齿条和调整齿辊带动夹袋杆向内转动,并配合夹板对不同体积的袋装垃圾外部进行夹紧操作,与此同时,调整齿条的位置变化,可以通过夹袋位置变化组件带动夹紧齿条进行位置的同步变化,使得在针对不同体积的垃圾袋时,通过夹袋杆和夹板在对应位置区域对垃圾袋的外部进行夹紧操作,而后通过切割刀对袋装垃圾中部进行切割处理,进一步的,此时安装座复位,使得夹袋杆带动夹取的垃圾袋向外侧移动,并保持夹取状态,直至通过放松齿条与分袋齿辊的啮合,实现对垃圾袋的放松,对垃圾袋和餐厨垃圾进行位置的分离,此过程中,首先通过光电传感器智能识别袋装垃圾的体积,而后只需要智能调节调整齿条的位置,即可通过安装座的上下活动,改变夹板的夹紧位置,对不同体积的垃圾袋外侧进行夹紧和后续的分离,操作同步性强,适合对不同体积的袋装垃圾进行分拣操作;
18、2.本发明,袋装垃圾掉落在承接板上,随着切割刀对袋装垃圾的切割,可以推动承接板向下移动,增加操作空间,此时在棘轮组件的作用下,承接板带动安装杆的下移,翻转齿辊与翻转齿条啮合时,承接板不会发生转动,而当切割结束时,随着切割刀的快速复位,承接板也会在第一弹性伸缩杆的作用下复位,此时翻转齿辊与翻转齿条啮合时,可以带动承接板进行翻转,而垃圾袋已经与内部餐厨垃圾分离,此时可以通过承接板将分离后的餐厨垃圾翻倒至第二收集箱内的抽屉内,进行暂存,实现垃圾袋和餐厨垃圾的独立存放,无需后续进行再次处理。
19、综上所述,本发明,只需要对袋装垃圾进行体积检测,配合后台控制,自动调节调整齿条的位置,即可通过安装座的下移和复位,实现对垃圾袋两侧对应位置的夹紧、后续移动以及放松掉落,整体流程操作简单,智能化程度高,无需额外操作,即可实现垃圾袋和内部垃圾非常清晰的分离,不会出现在分拣过程中垃圾袋和垃圾出现混杂的现象,进而在后续对垃圾进行回收利用时,不会受到垃圾袋的污染,例如将这么餐厨垃圾作为肥料或者牲畜饲料时,内部内有垃圾袋残留物,极大程度上提高餐厨垃圾回收利用的安全性,而此过程中可以适用于不同体积的垃圾,实用性高。
- 还没有人留言评论。精彩留言会获得点赞!