一种基于操作意图识别的起重机控制方法与系统
本发明涉及智能塔式吊车领域,尤其涉及一种基于操作意图识别的起重机控制方法与系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、吊车是一种起重设备,其机身采用塔架式结构,通过绳索将负载与旋臂上的小车相连,利用旋臂绕支柱旋转、小车沿旋臂平移,可以将负载送到预定的地点。由于其作业空间广阔,因此在建筑工地、船舶港口等工业场景中常见。
3、近年来,国内外自动化领域的许多专家学者针对塔式吊车系统的自动控制与消摆等问题开展了大量研究,提出了多种控制方法,希望实现塔式吊车的安全、高效运行。然而,这些方法只适用于全自动控制吊车,而在实际应用中,几乎所有吊车都是由操作人员控制的,这主要是因为全自动控制吊车的初始投资相对较大,而且在某些特殊情况下,人工操作可能会更加灵活和可靠,操作人员可以根据实际情况做出即时的判断和决策,这在某些情况下是全自动控制系统无法做到的。
4、然而,手动控制吊车存在诸多难以解决的问题:操作人员需要根据实际情况和经验来判断负载的目标位置,这种方式不仅需要操作人员具有丰富的经验和专业知识,而且在复杂的施工环境中,可能会出现误判的情况;由于吊车的机械结构和工作原理,其动态响应通常较慢,这意味着即使操作人员已经做出了控制指令,吊车也需要一段时间才能做出响应,这种延迟可能会影响操作的精度和效率;在操作人员操作吊车时,其视野通常受到吊车本身和施工环境的限制,可能会导致其无法清楚地看到吊车的工作状态和施工环境的实际情况,从而影响操作的精度和安全性;并且由于操作人员的手动控制引起的有效负载振荡也限制了操纵的效率,实际应用中操作人员通常通过缓慢移动小车/旋臂并等待不需要的运动衰减来解决振荡问题。
5、以上四个问题使得手动控制吊车对操作人员来说极具挑战性,因此研究在有操作人员参与的情况下的吊车自动控制是非常重要的。
6、为了研究吊车自动控制问题,研究者们针对塔式吊车建立了多个简化的动力学模型,包括点质量负载单摆模型、点质量负载双摆模型、分布式质量负载单摆模型、分布式质量负载双摆模型,由于在塔式吊车实际应用场景中负载通常具有特定的尺寸,在设计过程中不能被简化为质点,否则会导致最终负载振荡抑制效果鲁棒性不好,难以满足实际需要。现有针对塔式吊车点质量负载单摆系统和点质量负载双摆系统的控制研究较多,但无法直接转移到实际工业应用中,因此,研究带有分布式质量负载的塔式吊车的控制问题对塔式吊车的工业应用具有实际意义。
7、目前,带有分布式质量负载的塔式吊车系统的控制问题主要集中在两个方面:一方面需要实现小车的快速准确定位,以满足准确运送负载的要求;另一方面,需要有效地抑制负载的摆动。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本发明提供一种基于操作意图识别的起重机控制方法与系统,面向有操作人员参与的工作场景,能够提高塔式吊车的工作效率和性能,同时设计了相应的实验系统,可以模拟有操作人员参与的吊车运行过程。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供一种基于操作意图识别的起重机控制系统。
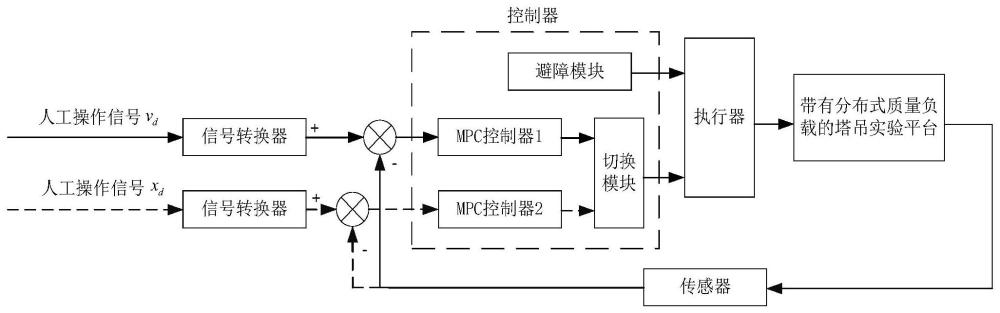
4、一种基于操作意图识别的起重机控制系统,包括:塔吊实验平台、传感器、控制器和执行器,所述传感器安装在塔吊实验平台上,
5、所述塔吊实验平台包括支柱,所述支柱上端设有绕支柱旋转的旋臂,所述旋臂上设有沿旋臂移动的小车,所述小车底部连接吊绳的一端,另一端连接分布式质量负载;
6、所述控制器,包括第一mpc控制器和第二mpc控制器,所述第一mpc控制器,用于对接收的操作指令进行处理,结合传感器采集的数据,输出控制小车/旋臂运动的控制指令;所述第二mpc控制器用于对接收的操作指令进行处理,结合小车/旋臂的当前位置,生成目标位置参考轨迹,以成本函数最小为目标,输出控制小车/旋臂定位的控制指令,并将控制小车/旋臂运动的控制指令和控制小车/旋臂定位的控制指令发送到执行器,以完成相应指令的执行。
7、进一步地,所述传感器包括角度传感器、位移传感器和视觉传感器,所述角度传感器分别安装于小车下方的吊绳上、吊绳靠近分布式质量负载处以及旋臂下方,所述位移传感器安装在小车上,所述视觉传感器安装在小车底部。
8、更进一步地,所述角度传感器用于获取分布式质量负载的旋转角度和旋臂的旋转角度,所述位移传感器用于获取小车沿旋臂的位移,所述视觉传感器用于测量障碍物与分布式质量负载的中心距离。
9、更进一步地,所述避障模块,用于根据视觉传感器采集的测量障碍物与分布式质量负载的中心距离,在判定需要紧急避障时,避障优先级高于操作指令,控制器由速度控制模式切换为位移控制模式,小车/旋臂减速或停止。
10、进一步地,所述控制器还包括切换模块,所述切换模块用于根据接收的操作指令,将由第一mpc控制器控制切换为由第二mpc控制器控制。
11、进一步地,所述起重机控制系统还包括信号转换器,用于将输入的操作意图转换为操作指令,并发送至控制器。
12、进一步地,所述另一端连接分布式质量负载,具体包括:吊绳的另一端连接吊钩,所述吊钩通过斜拉绳连接分布式质量负载。
13、更进一步地,所述成本函数为:
14、
15、其中,δu表示输入矩阵,f、φ为系数矩阵,为权重矩阵,r为参考轨迹矩阵,x(k)为k时刻系统状态矩阵。
16、本发明的第二个方面提供一种基于操作意图识别的起重机控制方法。
17、一种基于操作意图识别的起重机控制方法,采用第一个方面所述的基于操作意图识别的起重机控制系统,包括:
18、第一mpc控制器根据输入的小车运动开始指令,控制执行器动作,以使小车/分布式质量负载运动到目标位置;
19、切换模块根据输入的小车运动停止指令,将由第一mpc控制器控制切换为由第二mpc控制器控制;
20、第二mpc控制器控制小车/负载在目标位置进行定位;
21、第一mpc控制器根据输入的旋臂旋转开始指令,控制执行器动作,以使旋臂旋转到目标位置;
22、切换模块根据输入的旋臂旋转停止指令,将由第一mpc控制器控制切换为由第二mpc控制器控制;
23、第二mpc控制器控制旋臂在目标位置进行定位。
24、进一步地,在第一mpc控制器和第二mpc控制器控制过程中,分布式质量负载摆动角度小于设定的阈值范围。
25、与现有技术相比,本发明的有益效果是:
26、本发明根据实际塔式吊车运行或模拟实际塔式吊车运行,基于操作人员意图进行塔式吊车自动化控制,采用基于人工操作命令的跟随控制方法、基于意图识别的精确定位控制方法、人机共融平滑切换策略、紧急避障与人工操作融合控制策略,实现小车/旋臂速度控制、位置控制以及负载的消摆控制,有助于塔式吊车系统的自动控制研究;
27、本发明的研究对象为带有分布式质量负载的塔吊实验平台,这是一个相对复杂的系统,解决了现有对塔式吊车点质量负载单摆系统和点质量负载双摆系统控制研究无法转移到实际工业应用的问题,本发明不仅在理论上有重要的贡献,而且在实际应用中也具有很高的价值。
- 还没有人留言评论。精彩留言会获得点赞!