一种行车行经特定作业区域智能预警方法与流程
本发明涉及行车控制技术,更具体地说,它涉及一种行车行经特定作业区域智能预警方法。
背景技术:
1、吊车、航车、天车都是人们对起重机的俗称,而行车和现在我们所称的起重机也基本一样。行车驱动方式基本有两类:一为集中驱动,即用一台电动机带动长传动轴驱动两边的主动车轮;二为分别驱动,即两边的主动车轮各用一台电动机驱动。中、小型桥式起重机较多采用制动器、减速器和电动机组合成一体的“三合一”驱动方式,大起重量的普通桥式起重机为便于安装和调整,驱动装置常采用万向联轴器。行车作为工厂最重要的吊装吊运设备,工厂车间内的所有大件生产物料都依赖于行车的倒运,在多层平台间倒运生产物料中由于各种特殊因数,多层平台倒运大件生产物料主要的缺陷和不足有:
2、(1)当前行车在多层平台特定作业区域的上下倒运物料缺乏预警方法,对安全生产形成严峻威胁;
3、(2)多层平台间,人行通道交叉,吊运过程中,行人极易经过吊物下方十分危险。
技术实现思路
1、本发明要解决的技术问题是针对现有技术的不足,提供一种行车行经特定作业区域智能预警方法,实现了行车在特定作业区域停车时的预警。
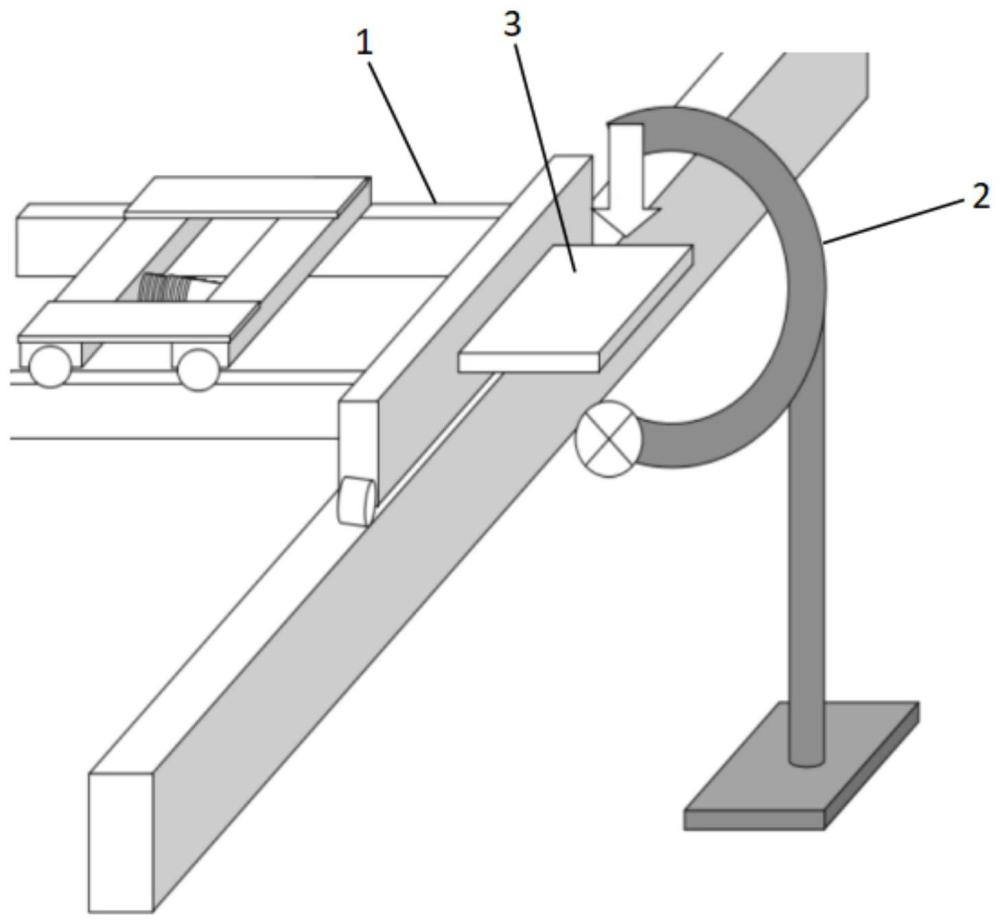
2、本发明所述的一种行车行经特定作业区域智能预警方法,标定行车在特定作业区域中的停车位置,在与所述停车位置相对应的行车外围位置安装一光栅组件,并在所述行车的一侧安装一感应板,设置与光栅组件通讯互联的预警组件;若所述光栅组件输出光栅电信号,且所述光栅电信号的持续输出时长大于或等于感应板经过光栅组件的总用时,则启动时间延时动作;若所述时间延时动作结束,且所述光栅组件依然输出光栅电信号,则启动预警组件;若所述时间延时未结束,但所述光栅组件停止光栅电信号输出,则不启动预警组件。
3、在所述光栅组件的输出端设置时间继电器,所述时间继电器用于控制预警组件的通断电。
4、在所述时间继电器和预警组件之间设置延时装置,当所述时间继电器被触发时,所述延时装置启动;当所述延时装置延时完毕并进入工作状态后,所述延时装置将预警组件与供电源之间的线路接通。
5、所述延时装置为延时继电器。
6、所述预警组件设置有多个,且所述预警组件安装在行车作业现场的通道口、门口处。
7、所述预警组件为声光报警器。
8、所述停车位置的标定方法为,将所述行车运行至特定作业区域中,并根据行车作业现场停止行车的移动,以所述行车的主吊钩的位置作为停车位置。
9、有益效果
10、本发明的优点在于:在行车的特定作业区域中设置停车位置,并通过光栅组件和预警组件的联动设计以及预警组件的延时控制,实现了行车在特定作业区域停车时的预警,解决了现有技术中因行车停车吊装无预警导致多层平台上的行人无法获知行车动作的问题,降低了现场的安全风险系数。
技术特征:
1.一种行车行经特定作业区域智能预警方法,其特征在于,标定行车(1)在特定作业区域中的停车位置,在与所述停车位置相对应的行车(1)外围位置安装一光栅组件(2),并在所述行车(1)的一侧安装一感应板(3),设置与光栅组件(2)通讯互联的预警组件;若所述光栅组件(2)输出光栅电信号,且所述光栅电信号的持续输出时长大于或等于感应板(3)经过光栅组件(2)的总用时,则启动时间延时动作;若所述时间延时动作结束,且所述光栅组件(2)依然输出光栅电信号,则启动预警组件;若所述时间延时未结束,但所述光栅组件(2)停止光栅电信号输出,则不启动预警组件。
2.根据权利要求1所述的一种行车行经特定作业区域智能预警方法,其特征在于,在所述光栅组件(2)的输出端设置时间继电器(kt),所述时间继电器(kt)用于控制预警组件的通断电。
3.根据权利要求2所述的一种行车行经特定作业区域智能预警方法,其特征在于,在所述时间继电器(kt)和预警组件之间设置延时装置,当所述时间继电器(kt)被触发时,所述延时装置启动;当所述延时装置延时完毕并进入工作状态后,所述延时装置将预警组件与供电源之间的线路接通。
4.根据权利要求3所述的一种行车行经特定作业区域智能预警方法,其特征在于,所述延时装置为延时继电器(ka)。
5.根据权利要求1所述的一种行车行经特定作业区域智能预警方法,其特征在于,所述预警组件设置有多个,且所述预警组件安装在行车作业现场的通道口、门口处。
6.根据权利要求1或5所述的一种行车行经特定作业区域智能预警方法,其特征在于,所述预警组件为声光报警器。
7.根据权利要求1所述的一种行车行经特定作业区域智能预警方法,其特征在于,所述停车位置的标定方法为,将所述行车运行至特定作业区域中,并根据行车作业现场停止行车的移动,以所述行车的主吊钩的位置作为停车位置。
技术总结
本发明公开了一种行车行经特定作业区域智能预警方法,涉及行车控制技术,标定停车位置,在与停车位置相对应的行车外围位置安装一光栅组件,并在行车的一侧安装一感应板,设置与光栅组件通讯互联的预警组件;若光栅组件输出光栅电信号,且光栅电信号的持续输出时长大于或等于感应板经过光栅组件的总用时,则启动时间延时动作;若时间延时动作结束,且光栅组件依然输出光栅电信号,则启动预警组件;若时间延时未结束,但光栅组件停止光栅电信号输出,则不启动预警组件。本发明实现了行车在特定作业区域停车时的预警,解决了现有技术中因行车停车吊装无预警导致多层平台上的行人无法获知行车动作的问题,降低了现场的安全风险系数。
技术研发人员:胡秋竻,朱春韶,何剑辉,王鑫,黄利明,唐冠群,潘里东,尹少华,李斌
受保护的技术使用者:阳春新钢铁有限责任公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!