入箱机器人夹爪及机器人和夹取方法与流程
本发明涉及一种用于夹取产品入箱与料架拆码垛智能化作业的入箱机器人夹爪、机器人和应用此类机器人的夹取方法,属于物流输送与自动化控制领域。
背景技术:
1、现有电商与快递行业的包装输送现场使用有各种自动化集包与输送设备,以配合作业人员实施小件入箱、拆码垛及集中发包的操作,批量货物的处理量与作业效率均要求较高,随之而来的对于操作端机器人或机械手的运行压力也显著得增大。
2、目前新能源储能电池包生产线的入箱工序仍采取人工操控叉车入箱的方式,不仅效率低下且因运行成本较高,不利于产线自动化水平的提高,装配工艺需要逐渐转变-半自动产线搭配机械式夹爪的作业模式。在此技术背景下,现有机械夹爪难以适应使用要求,特别是在电池包抓取和自动入箱过程中难以达到精细化操作,同时也不具备应对料架拆码垛的能力。在批量入箱操作时难以准确地调节夹取力而易导致箱体受损,而且入箱空间定位精度也不高。
3、鉴于此,特提出本专利申请。
技术实现思路
1、本发明所述入箱机器人夹爪及机器人和夹取方法,在于解决上述现有技术存在的问题而提出一种改进型的可实现抓取和自动入箱的夹取机构,该夹取机构同时具有料架拆码垛作业性能,相应地提高产线自动化水平与最大化利用如agv等输送设备的搬运能力,从而达到有效提升夹取机构与应用该型夹取机构的机器人入箱作业效率与准确性、优化搬运、抓取与入箱连续作业控制的精细化与流程操控智能化的目的。
2、实现上述设计目的,所述的入箱机器人夹爪包括上框架组件,在上框架组件上分别设置有沿水平方向垂直交叉分布的一组推力组件与前阻挡组件、以及一组左夹爪组件与右夹爪组件;所述的推力组件与前阻挡组件沿线性方向从两侧夹持并定位提定的的产品,所述的左夹爪组件与右夹爪组件沿线性方向从两侧夹取并转运指定的产品;所述的左夹爪组件和右夹爪组件具有相同且沿上框架组件两侧对称分布的结构;所述的左夹爪组件包括一夹爪支架、在夹爪支架的顶部设置有用于滑动连接于上框架组件的第二滑块,在夹爪支架的侧部分别连接有一组导向轮组件、滚轮条和用于连接上框架组件上的驱动装置的浮动接头。
3、进一步地,所述的夹爪支架通过一向外侧延伸的支腿连接料架抓取组件,料架抓取组件包括第二气缸,第二气缸的输出端驱动连接于第二夹紧臂的一端,第二夹紧臂的另一端设置由软质材料制成的衬垫。
4、进一步地,所述的导向轮组件具有数组依次沿直线排列的导向轮组,每组导向轮组通过至少1组第二导向轴和第二直线轴承穿套连接于夹爪支架的侧部。
5、进一步地,所述的滚轮条具有数组依次沿直线排列的滚轮组,每一滚轮的接触面均垂直向上分布。
6、进一步地,所述的上框架组件包括一组通过型材拼接组成的焊接框架,在焊接框架的顶部固定安装有用于连接六轴机器人操作部末端的法兰盘,在焊接框架的底部、沿垂向相互垂直交叉排列有第一直线导轨和第二直线导轨;在焊接框架的侧部分别连接有两组各自驱动左夹爪组件与右夹爪组件的侧推气缸、伺服电机和减速机、以及由伺服电机和减速机通过联轴器沿轴向驱动连接的丝杆。
7、进一步地,两组各自驱动左夹爪组件9与右夹爪组件10的侧推气缸12的驱动气路之间连接有y型接头52,两路驱动气路连通于同一气动管路中。
8、进一步地,所述的推力组件沿上框架组件的x轴或y轴与前阻挡组件分列于第一直线导轨的两端,其包括一推板支座,在推板支座的顶部安装滑动连接于第一直线导轨上的第一滑块、以及沿轴向套设于丝杆上的丝杆螺母。
9、进一步地,所述的前阻挡组件包括安装于上框架组件上的第一气缸,第一气缸的输出端驱动连接于第一夹紧臂的一端,第一夹紧臂的另一端设置有由软质材料制成的衬垫。
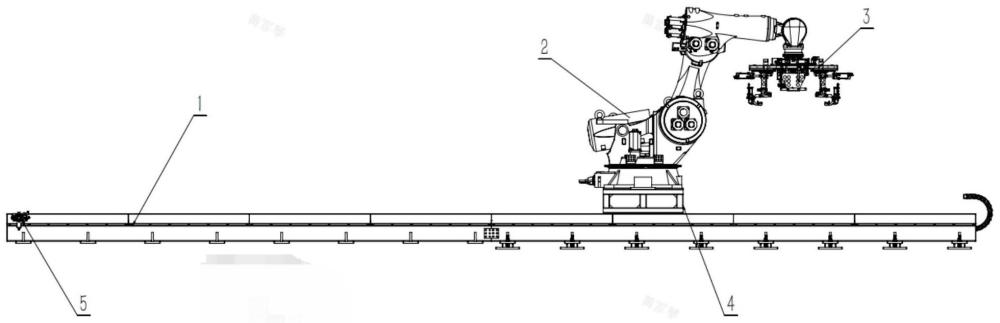
10、基于上述入箱机器人夹爪的结构设计,本申请同时提出下述新型机器人,其包括滑动运行于地轨上的六轴机器人操作部,在六轴机器人操作部的末端连接如上述结构设计的入箱机器人夹爪,在地轨一侧设置有连接并用于向入箱机器人夹爪提供气力输送的气源组件。
11、基于上述入箱机器人夹爪及机器人的结构设计,本申请同时提出下述机器人夹取方法:六轴机器人操作部沿地轨将入箱机器人夹爪输送至取料工站的待夹取工位垂向上方;
12、位于上框架组件上的第二扫码枪对指定产品表面的条形码进行扫码识别,若识别成功则执行后续操作,若识别不成功则报警以交由人工操作干预;
13、两组侧推气缸各自驱动左夹爪组件与右夹爪组件沿两侧向中间将指定产品夹持到位;
14、六轴机器人操作部沿垂向提升入箱机器人夹爪,直至左夹爪组件与右夹爪组件的滚轮条与指定产品的底部接触;
15、推力组件在伺服电机的驱动下从前方推动指定产品,将其分别在滚轮条上直线滑动至与前阻挡组件的衬垫接触;
16、指定产品在夹取并执行后续入箱操作的过程中,始终同时在前后方向上受到推力组件与前阻挡组件的阻挡限位、在左右方向上受到左夹爪组件与右夹爪组件的夹持驱动作用;
17、入箱机器人夹爪夹取指定产品完成入箱作业。
18、综上内容,所述的入箱机器人夹爪及机器人和夹取方法具有的优点是:
19、1、本申请能够适用于多种来料方式包括agv输送,夹爪能够精准且快捷地实施小件包装箱抓取入箱操作,以及针对来料料架同时实现拆码垛功能,从而最大化地利用现有输送容量而显著地提升一次来料入箱包装作业,整体运行效率较高、生产成本较低;2、本申请提出的夹爪具备抓取视觉引导设置,2d相机可快速捕捉小件包装箱的来料姿态,从而具有随机调整夹爪姿态和快速准确抓取的性能,有利于提高夹取效率和保护包装箱不受损坏;
20、3、本申请提出的夹爪具备簇架视觉引导设置,能够通过3d相机快速拍照以定位簇架每一层的放置坐标点,从而实现小件包装箱更-精准地入箱定位,一次入箱成功率较高,达到全自动化的智能操作要求。
21、4、本申请提出的夹爪兼具来料料架的拆码垛功能,有利于提升如agv等搬运设备的输送能力,有效地提升包装生产线整体的输送作业效率。
技术特征:
1.一种入箱机器人夹爪,其特征在于:包括上框架组件,在上框架组件上分别设置有沿水平方向垂直交叉分布的一组推力组件与前阻挡组件、以及一组左夹爪组件与右夹爪组件;
2.根据权利要求1所述的入箱机器人夹爪,其特征在于:所述的夹爪支架通过一向外侧延伸的支腿连接料架抓取组件,料架抓取组件包括第二气缸,第二气缸的输出端驱动连接于第二夹紧臂的一端,第二夹紧臂的另一端设置由软质材料制成的衬垫。
3.根据权利要求1所述的入箱机器人夹爪,其特征在于:所述的导向轮组件具有数组依次沿直线排列的导向轮组,每组导向轮组通过至少1组第二导向轴和第二直线轴承穿套连接于夹爪支架的侧部。
4.根据权利要求1所述的入箱机器人夹爪,其特征在于:所述的滚轮条具有数组依次沿直线排列的滚轮组,每一滚轮的接触面均垂直向上分布。
5.根据权利要求1所述的入箱机器人夹爪,其特征在于:所述的上框架组件包括一组通过型材拼接组成的焊接框架,在焊接框架的顶部固定安装有用于连接六轴机器人操作部末端的法兰盘,在焊接框架的底部、沿垂向相互垂直交叉排列有第一直线导轨和第二直线导轨;
6.根据权利要求5所述的入箱机器人夹爪,其特征在于:两组各自驱动左夹爪组件9与右夹爪组件10的侧推气缸12的驱动气路之间连接有y型接头52,两路驱动气路连通于同一气动管路中。
7.根据权利要求1所述的入箱机器人夹爪,其特征在于:所述的推力组件沿上框架组件的x轴或y轴与前阻挡组件分列于第一直线导轨的两端,其包括一推板支座,在推板支座的顶部安装滑动连接于第一直线导轨上的第一滑块、以及沿轴向套设于丝杆上的丝杆螺母。
8.根据权利要求7所述的入箱机器人夹爪,其特征在于:所述的前阻挡组件包括安装于上框架组件上的第一气缸,第一气缸的输出端驱动连接于第一夹紧臂的一端,第一夹紧臂的另一端设置有由软质材料制成的衬垫。
9.一种机器人,其特征在于:包括滑动运行于地轨上的六轴机器人操作部,在六轴机器人操作部的末端连接如权利要求1至8任一所述的入箱机器人夹爪,在地轨一侧设置有连接并用于向入箱机器人夹爪提供气力输送的气源组件。
10.一种机器人夹取方法,其特征在于:六轴机器人操作部沿地轨将入箱机器人夹爪输送至取料工站的待夹取工位垂向上方;
技术总结
本发明所述的入箱机器人夹爪及机器人和夹取方法,提出一种改进型的可实现抓取和自动入箱的夹取机构,该夹取机构同时具有料架拆码垛作业性能,相应地提高产线自动化水平与最大化利用如AGV等输送设备的搬运能力,从而达到有效提升夹取机构与应用该型夹取机构的机器人入箱作业效率与准确性、优化搬运、抓取与入箱连续作业控制的精细化与流程操控智能化的目的。入箱机器人夹爪包括上框架组件,在上框架组件上分别设置有沿水平方向垂直交叉分布的一组推力组件与前阻挡组件、以及一组左夹爪组件与右夹爪组件;所述的推力组件与前阻挡组件沿线性方向从两侧夹持并定位提定的的产品,所述的左夹爪组件与右夹爪组件沿线性方向从两侧夹取并转运指定的产品。
技术研发人员:张帝,赵明,黄家攀,于斌,刘腾澳
受保护的技术使用者:科捷智能科技股份有限公司
技术研发日:
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!