一种智能金库及其运行方法与流程
本发明涉及智能金库,具体为一种智能金库及其运行方法。
背景技术:
1、未来金库的发展趋势是由于员工老龄化趋势的发展,导致金库作业人员面临人手不足的情况,同时员工老龄化遇上繁重的体力劳动导致人员受伤的概率大增,全人工作业对于金库的风险防范也带来了挑战。
2、目前存在的主要问题就是需要解决人工劳动强度问题,依据机器设备辅助人工作业解决问题,依靠技术手段防范业务风险问题,实现信息流、实物流、账务流的一体化管理,其次就是大部分依靠人工作业、手工拉拖车,手工搬箱子,人工核对纸制单据,存在实物信息和账务信息隔离的情况,存在的配款时手工挑选箱子的困难,需要配某一个网点的现金时,则需要手工从上百个箱子中寻找挑选出所需要的箱子,劳动强度大,靠肉眼识别箱子容易出错。
3、金库工作人员年龄普遍较大,这可能引发团队的技术流失和知识传承问题,可能需要更多的培训和资源;金库操作对员工来说是一个高度体力和脑力集中的工作,这可能会引发工作疲劳、错误率上升,进一步影响工作质量;金库内贮存大量贵重货物,存在潜在的风险,包括监守自盗的威胁,这需要更强有力的控制措施;金库操作需要大面积的操作空间,这可能会导致金库空间利用率低,浪费资源;不同环节之间信息传递缺乏协调,主要依赖纸质单据,这可能导致信息不透明、可追溯性差,阻碍了流程的有效管理。
4、因此,设计实用性强和能够由智能设备负责搬运和码放,工作人员只需将款箱放在对应的托盘或款箱上,整个运输过程由智能设备完成,大幅度节约人力成本的一种智能金库及其运行方法是很有必要的。
技术实现思路
1、本发明的目的在于提供一种智能金库及其运行方法,以解决上述背景技术中提出的问题。
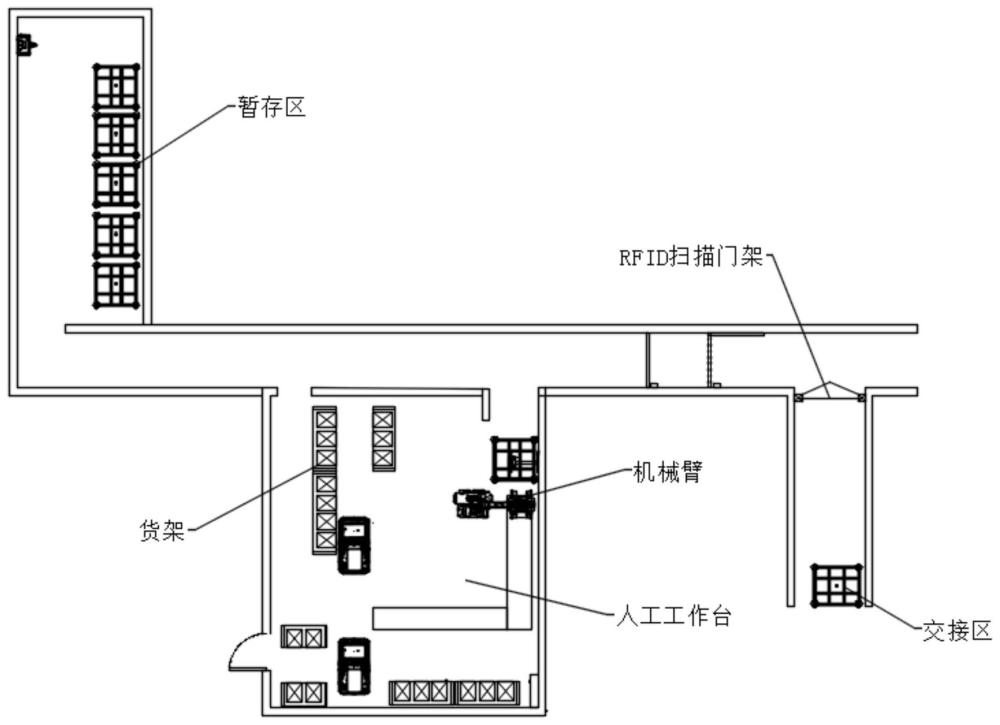
2、为了解决上述技术问题,本发明提供如下技术方案:一种智能金库,包括agv搬运机器人、rfid门架设备、rfid控制设备、分拣机械手机械臂、流转输送线和高层货架料箱agv机器人设备。
3、所述agv搬运机器人用于点对点的搬运、将库内存放在预设位置上的托盘款箱搬运至目标储位进行分拣入库或者分拣出库。
4、所述rfid门架设备是用于批量扫描款箱内唯一识别号芯片信息,然后同步金库终端当日入库所有款箱信息进行比对,如果有存在不同的款箱入库就设置为异常款箱人工操作处理比对一致的款箱则进行与托盘的绑定进行数据留存进一步执行入库业务。
5、所述rfid控制设备是用于款箱输送线上流转的款箱到达指定的rfid控制设备位置进行对款箱内唯一识别号芯片信息进行扫描然后进行数据留存以及同步金库终端进行业务汇报款箱编码上报。
6、所述分拣机械手机械臂是用于对款箱进行抓取放入款箱流转输送线,包括机器人本体以及集成在机器人本体上的3d视觉识别组件、真空抓取组件和rfid控制设备识别组件。
7、所述3d视觉识别组件,其用于对款箱进行识别定位,并生成款箱定位信息。
8、所述真空抓取组件,其末端具体为真空吸盘矩阵并用于根据款箱定位信息抓取款箱。
9、所述rfid控制设备识别组件,其用于读取真空抓取的款箱上的rfid标签记载的唯一识别号,并通过唯一识别号识别出款箱信息。
10、所述分拣机械手机械臂用于将款箱进行定位抓取,并识别款箱信息把手位置朝向。
11、所述流转输送线用于将款箱流转到业务固定的位置对其进行操作,本体集成传感器设备、rfid控制设备和九十度移载机折弯结构可以解决场地受限制的问题,针对不同的场地形状设置不同结构的输送线,且在转角出设置九十度移载机保证在转弯处平稳运输。
12、所述传感器设备是用于当款箱遮挡住传感器红外时上报款箱到达信号以达到不会发生款箱追尾以及丢失情况确保了款箱的安全性,并且当款箱到达流转输送线入库末端时传感器和rfid控制设备通知系统并且将款箱信息传递置系统下发款箱分拣上架任务或者通知料箱agv机器人进行抓取或者配款出库分拣机械手机械臂通知抓取。
13、所述高层货架料箱agv机器人设备用于将完成拆箱或者配款时使用款箱时对款箱做的存取功能,本体具有红外感应功能识别款箱是否到达输送线入库末端接驳位、本体还具有五层款箱的存储位置每次可以抓取到达的款箱个数为五个,根据系统发的码放任务进行放置到指定货架位置,具有识别条码功能。
14、根据上述技术方案,所述流转输送线均为双向输送线,具有双向输送能力,两条流转输送线还用于将一个agv搬运机器人搬运过来的托盘上的款箱,使用分拣机械手机械臂进行抓取放置流转输送线上并且按照随机方式流转款箱分配至人工工作位。
15、根据上述技术方案,所述agv搬运机器人、分拣机械手机械臂、rfid门架设备与agv搬运机器人交互,并对流转输送线、rfid控制设备交互,料箱agv搬运机器人的运行进行统一调度控制,进而形成控制终端。
16、根据上述技术方案,所述流转输送线入库始发点设有传感器设备,用于通知系统进行款箱拆垛并计数功能,并通知流转输送线进行平均分置各个人工工作位流转输送线构成折弯结构,在输送线处设有一个九十度移载机方便款箱平稳流转。
17、根据上述技术方案,所述流转输送线均设有流转输送线传感器设备感应款箱实时到达的位置信号并进行与分拣机械手机械臂、料箱agv搬运机器人之间的交互。
18、根据上述技术方案,所述款箱内部设有用于记载唯一识别号的rfid芯片标签,唯一识别号用于表征款箱的详细信息:网点信息、款箱编号、存放位置、是否异常系统通过rfid控制器进行信息通知负责记录留存款箱实时数据。
19、根据上述技术方案,所述agv搬运机器人搬运款箱,到达分拣机械手机械臂下拆码垛位,通知分拣机械手机械臂进行款箱抓取,当分拣机械手机械臂拆码垛完成会通知agv搬运机器人将款箱搬运至缓存区或暂存区。
20、根据上述技术方案,所述分拣机械手机械臂包括机器人本体以及集成在分拣机械手上的3d视觉识别组件、真空抓取和rfid识别组件,通过视觉和agv搬运机器人的通知到位情况进行对款箱的抓取。
21、一种智能金库的运行方法,包括以下步骤:
22、入库操作:
23、入库agv搬运机器人将满载款箱的托盘从交接区搬运至出/入库暂存区进行款箱信息核对,agv搬运机器人进入入库暂存区经过rfid门架时进行扫描托盘上款箱内的唯一标识芯片,对接总行系统接口,金库终端系统当日的实际入库款箱进行逐一比对,如果存在不符则标记为异常款箱,比对完全匹配的款箱且将款箱与托盘进行绑定实现数据的可追溯性,核对完成后并且绑定完成,agv搬运机器人将核对过的款箱从交接区将核对完成后的款箱搬运至暂存区等待入库款箱进行分拣机械手的工作位进行分拣。
24、当日所有核对完成的应当入库款箱到达暂存区后,agv搬运机器人再将所有配款区的托盘上携带的款箱搬运置分拣机械手的拆码垛位进行分拣上架操作,当托盘到达拆码垛位,分拣机械手视觉对款箱进行识别定位,并生成款箱定位信息,真空抓取组件对定位完成的款箱位置进行款箱的抓取,视觉识别款箱的把手位置是否朝向正确,机械臂进行九十度旋转,之后放置到流水线的款箱会被款箱流转输送线本体的传感器感应到款箱到达,入库开始端流水线开始将款箱流动至人工工作位进行入库拆箱的操作。
25、款箱在流转输送线上的rfid控制器设备进行扫描款箱信息,上报行方系统,行方电脑终端可以回显出对应款箱内的账务现金信息。
26、当款箱到达人工工作位,rfid设备扫描款箱内唯一标识芯片识别款箱信息上报系统,进行数据和实物比对正确后,人工将货币从款箱取出后,通过点击流转输送线本体上按钮将款箱进行继续流转,依次进行。
27、当款箱通过传送带到达流水线末端后,系统进行该款箱的上架任务,下发到高层货架料箱agv机器人设备,并且规定该款箱去往高层货架的输送线接驳位,当款箱到达流水线接驳位,款箱流转输送线本体的传感器,通知料箱agv机器人进行抓取操作后,料箱agv机器人放置系统下发任务,固定货架位置后料箱agv机器人上报系统,款箱放置完成,系统对完成的款箱与货架进行绑定。
28、依次将机械臂下的托盘上的款箱利用设备、输送线和人工配合,实现人工核对账务和实物信息,并自动实现空款箱上架动作,完成入库作业。
29、出库操作:
30、每日出库作业需要人工操作手持pad设备进行获取,需要配款网点的配款单信息,系统通过获取到的配款单信息,对入库分拣上架完成的款箱信息进行比对,然后系统对款箱进行排序按照分类币种:人民币-包含十大外币-包含十大外币之外的币种类型进行排序然后,系统按照所选的线路给高层货架料箱agv机器人下发取箱任务。
31、人工操作pad进行所选线路的款箱进行出库操作,系统搬运agv机器人搬运下发的所需托盘数量,将空托盘搬运置分拣机械臂下面的工作区的拆码垛位等待码垛。
32、同时料箱agv机器人通过系统获取到的取箱任务进行对货架上排好顺序的款箱进行逐一下架取箱取满五个款箱时,高层货架的料箱agv机器人将满载款箱搬运至接驳口,逐一放置到款箱流转输送线上。
33、款箱流转输送线将款箱通过线体流转到人工工作位,进一步当款箱到达人工工作位后,款箱流转输送线本体上的rfid控制设备会读取该款箱内的唯一标识芯片对应的详细信息,以及对应的网点配款单进行通知金库终端系统进行金额展示,人工通过行内电脑显示器中回显该款箱所需配款金额进行装配操作。
34、当人工进行配款装箱完成操作,通过线体输送线继续流转款箱,进一步款箱到达出库末端,款箱流转输送线本体传感器感应到款箱到达,通知款箱分拣机器人,进行款箱的抓取,放置到已准备就绪码垛的空托盘上。
35、进一步托盘码垛完成,款箱分拣机器人通知系统调用搬运agv机器人进行搬运到暂存区等待出库操作,同时,如果当前出库的线路需要的空托盘大于一个,则为了避免单通道导致的交通阻塞,将发往暂存区的托盘先缓存到机械臂门口的右侧,让开进出机械臂的通道,系统继续从暂存区调用搬运agv机器人,将下一个空托盘搬运到机械臂下面的工作区,当此托盘到达工作区后,系统再发送指令将门口右侧缓存的托盘调度到暂存区的空闲储位上。
36、进一步当日所有需要配款的款箱都到达暂存区后,人工统一对配款缓存区的所有款箱进行款箱信息以及出库单对应的信息进行核对操作,核对完成后,由人工操作pad设备,给共享打印机发送指令,将需要出库的款箱信息单打印出纸质单据。
37、进一步全部核对完成后的款箱,人工操控pad设备,调度agv搬运机器人将款箱托盘依次搬运到交接区进行交接交接。
38、进一步当agv搬运机器人到达交接区rfid门架设备时,rfid门架设备扫描所经过的所有款箱唯一标识芯片,对应信息进行记录传输至行方金库终端系统,进行记录以及系统进行数据留存,当日所有需要出库的托盘全部到达至交接区后需要人工将托盘上的款箱拿走,空托盘拉走,完成交接。
39、与现有技术相比,本发明所达到的有益效果是:
40、1、本发明,通过采用人员身份生物识别技术,以实现责任明晰和控制有效,降低风险,金库内实现智能化,减少了对现金及贵金属的潜在损害。
41、2、本发明,通过由智能设备负责搬运和码放,工作人员只需将款箱放在对应的托盘或款箱上,整个运输过程由智能设备完成,大幅度节约人力成本。
42、3、本发明,通过智能设备能够快速执行系统指令,确保高效率的运作,输送设备能够快速分析指令,并将货物存放到指定货位。
43、4、本发明,通过实物加装rfid,实现信息流、实物流和账务流的匹配,实现实时监管记录,提高了出入库业务管理效率,系统提供在线实时盘点功能。
44、5、本发明,通过可提供现金中心库内、库外所有物品的全生命周期信息,包括位置、定位信息、操作员、操作时间和流转信息,系统还提供日志管理功能,用于查询历史数据和打印报表,提升金库管理的运营效率,降低各环节的风险。
45、6、本发明,可以利用rfid批量快速扫描款箱子中增加的rfid标签,实现快速批量数据上传功能。
46、7、本发明,通过rfid识别信息后,直接对接总行数据接口,将相关箱子信息上报行方,省去了人工扫描的步骤,同时和总行数据联动回显到电脑显示器,款箱的账务信息一目了然,方便了人工开箱核对,省去了纸制核对工作。
47、8、本发明,通过拆完的空款箱全部存放在立体的高层货架上,节约了空间,方便整理和盘点,采用高层货架机器人,可以自动存放和挑选所需要的空箱子,提高了效率准确度,节省了人工避免了差错。
- 还没有人留言评论。精彩留言会获得点赞!