设备移动方法、装置、设备、存储介质和程序产品与流程
本申请涉及磁驱输送,特别是涉及一种设备移动方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、磁驱输送线是一种基于磁悬浮技术的输送系统,利用磁力和悬浮原理来实现物品的高效输送。磁悬浮技术是一种利用磁力排斥和吸引的原理,使物体悬浮在磁场中的技术。在磁驱输送线中,物品被放置在小车上,通过磁力悬浮和推动来实现物品的输送。相比传统的输送系统,磁驱输送线具有更低的摩擦和阻力,可以实现更高的输送速度和更低的能耗。
2、磁驱输送线采用模块化设计,产线升级改造只需重新组合,灵活组装,避免复杂设计,让生产线就像搭积木一样简单,采用现有系统集成,大幅度提高产品的生产效率,可节约开支,突破个性化产品生产瓶颈。
3、传统技术中,输送线的路径不涉及岔道,路径表示为path id+position。正常每个路径都有一个起始点和末尾点.岔道指多个路径(路径个数大于2)有一个共同的端点,这个共同的端点可以是起始点或末尾点。传统技术中对于路径的描述,一般是采用穷举的方式。
4、然而,对于复杂的网络,若仍采用穷举的方式进行描述,会使得路径描述变得复杂,占用大量的资源,影响整个输送系统的运行效率。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够使得路径描述变的简单,降低资源占用,提高输送系统的运行效率的设备移动方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本申请提供一种设备移动方法,所述方法包括:
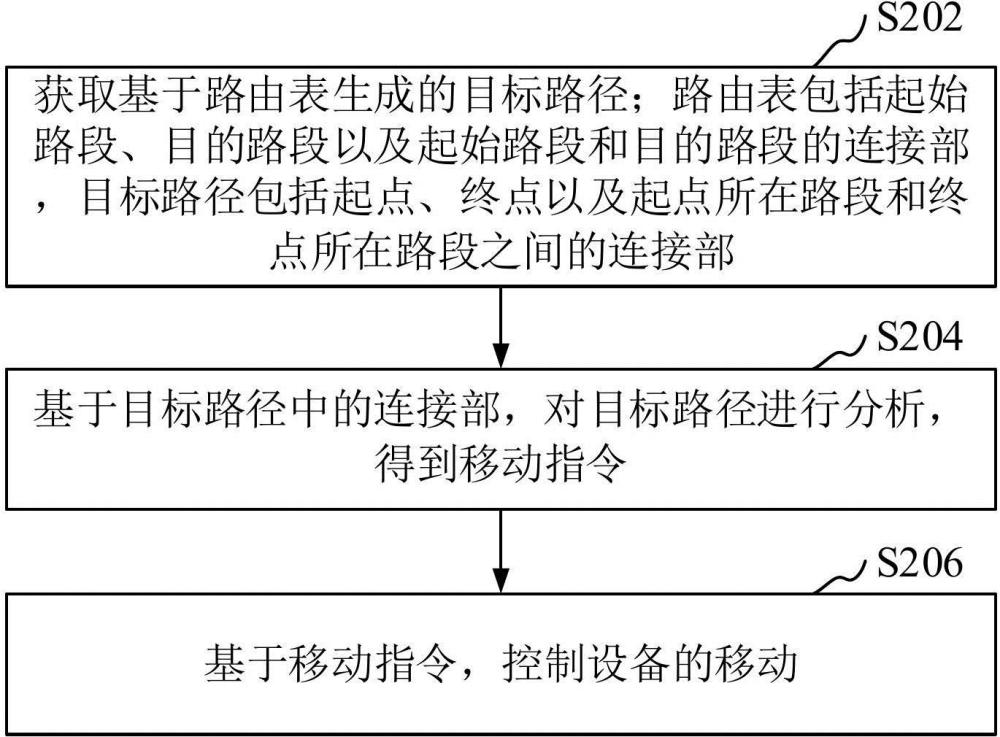
3、获取基于路由表生成的目标路径;所述路由表包括起始路段、目的路段以及所述起始路段和所述目的路段之间的连接部,所述目标路径包括起点、终点以及所述目标路径上的各路段之间的所述连接部;
4、基于所述目标路径中的所述连接部,对所述目标路径进行分析,得到移动指令;
5、基于所述移动指令,控制设备的移动。
6、在其中一个实施例中,所述连接部包括路段之间的交叉点以及摆渡路段中的至少一个,所述交叉点为至少两个固定路段的端点,所述摆渡路段为位置可变的路段。
7、在其中一个实施例中,所述基于所述目标路径中的所述连接部,对所述目标路径进行分析,得到移动指令,包括:
8、获取路径分解表,所述路径分解表包括连接部类型、设备类型以及对应的移动指令;
9、获取所述目标路径中的连接部的连接部类型;
10、基于所述连接部的连接部类型从所述路径分解表中,获取各设备类型对应的移动指令;
11、将所获取的移动指令添加至对应的所述设备的指令队列。
12、在其中一个实施例中,所述基于所述连接部类型从所述路径分解表中,获取各设备类型对应的移动指令,包括:
13、当所述连接部类型为交叉点时,从所述路径分解表中,获取输送设备对应的移动指令;
14、当所述连接部类型为摆渡段时,从所述路径分解表中,获取输送设备以及摆渡路段对应的移动指令。
15、在其中一个实施例中,所述方法还包括:
16、接收针对所述路径分解表的调整指令;
17、基于所述调整指令对所述路径分解表中的连接部类型进行调整,并对应调整所述连接部类型对应的设备类型和移动指令。
18、在其中一个实施例中,所述基于所述移动指令,控制设备的移动,包括:
19、判断是否满足所述移动指令的执行条件;
20、当满足所述移动指令的执行条件时,执行所述移动指令,控制所述设备的移动,在所述移动指令执行完成后,从所述指令队列中获取到下一条移动指令,并继续执行判断是否满足所述移动指令的执行条件的步骤,直至所述指令队列中的移动指令均执行完成;
21、当不满足所述移动指令的执行条件时,等待,直至满足所述移动指令的执行条件,继续执行执行所述移动指令的步骤。
22、在其中一个实施例中,所述执行所述移动指令,控制所述设备的移动,包括:
23、控制输送设备移动,且获取所述目标路径上的下一连接部;
24、当下一所述连接部的类型为目标类型时,向所述连接部对应的处理设备发送通行请求,所述通行请求用于指示所述处理设备对通过所述连接部的移动设备进行规划;
25、在接收到所述连接部对应的处理设备返回的通行许可信息的情况下,控制所述输送设备通过所述连接部。
26、第二方面,本申请还提供一种设备移动装置,所述装置包括:
27、目标路径获取模块,用于获取基于路由表生成的目标路径;所述路由表包括起始路段、目的路段以及所述起始路段和所述目的路段之间的连接部,所述目标路径包括起点、终点以及所述目标路径上的各路段之间的所述连接部;
28、路径分解模块,用于基于所述目标路径中的所述连接部,对所述目标路径进行分析,得到移动指令;
29、移动模块,用于基于所述移动指令,控制设备的移动。
30、第三方面,本申请还提供一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现上述的任意一个实施例中的方法的步骤。
31、第四方面,本申请还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述的任意一个实施例中的方法的步骤。
32、第五方面,本申请还提供一种计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现上述的任意一个实施例中的方法的步骤。
33、上述设备移动方法、装置、计算机设备、存储介质和计算机程序产品,其中路由表包括起始路段、目的路段以及所述起始路段和所述目的路段之间的连接部,目标路径包括起点、终点以及所述起点和所述终点之间的所述连接部,所述起点包括起始路段和起点位置,所述终点包括目的路段和终点位置,而不需要将两点之间所有的最短路径进行穷举,仅需要给出各个路段之间的连接部即可,且目标路径也仅是通过起点、终端和连接部描述,使得路径描述变得简单,减少了资源占用,提高了系统的处理效率,且这样基于连接部来对目标路径进行分析,从而得到设备的移动指令,进而基于该移动指令实现设备从起点移动至终端,仅需要基于目标路径中的连接部进行分析得到移动指令,使得移动控制也变得简单,提高了处理效率。
技术特征:
1.一种设备移动方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述连接部包括路段之间的交叉点以及摆渡路段中的至少一个,所述交叉点为至少两个固定路段的端点,所述摆渡路段为位置可变的路段。
3.根据权利要求1所述的方法,其特征在于,所述基于所述目标路径中的所述连接部,对所述目标路径进行分析,得到移动指令,包括:
4.根据权利要求3所述的方法,其特征在于,所述基于所述连接部类型从所述路径分解表中,获取各设备类型对应的移动指令,包括:
5.根据权利要求3所述的方法,其特征在于,所述方法还包括:
6.根据权利要求3至5任意一项所述的方法,其特征在于,所述基于所述移动指令,控制设备的移动,包括:
7.根据权利要求6所述的方法,其特征在于,所述执行所述移动指令,控制所述设备的移动,包括:
8.一种设备移动装置,其特征在于,所述装置包括:
9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
11.一种计算机程序产品,包括计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请涉及一种设备移动方法、装置、计算机设备、存储介质和计算机程序产品。所述方法包括:获取基于路由表生成的目标路径;所述路由表包括起始路段、目的路段以及所述起始路段和所述目的路段之间的连接部,所述目标路径包括起点、终点以及所述目标路径上的各路段之间的所述连接部;基于所述目标路径中的所述连接部,对所述目标路径进行分析,得到移动指令;基于所述移动指令,控制设备的移动。采用本方法能够使得路径描述变的简单,降低资源占用,提高输送系统的运行效率。
技术研发人员:叶进余,周兴鹏,沈佳能
受保护的技术使用者:苏州纵苇科技有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!