一种智能编织袋抓取及传送生产线的制作方法
本发明涉及物料抓取及输送,特别涉及编织袋抓取及输送。
背景技术:
1、编织袋被广泛用于包装各种产品,对于编织袋的自动抓取主要是采用吸盘抓取,编织袋的传送通常采用传送带输送。吸盘与机械臂连接,传送带安装在机械臂一侧,吸盘吸取编织袋后将编织袋放到传送带上输送,机械臂可以通过人操作机械臂去抓取编织袋,机械臂也可以按照预先编制好的控制程序沿控制路线来回移动反复抓取编织袋,在传送带后端由人工或另一机械臂将编织袋移动至预定位置进行码垛。
2、上述现有技术存在以下缺陷:1、机械臂和传送带都是固定安装在某一位置,吸盘只能吸取机械臂能够伸到位置范围内的编织袋,机械臂伸不到的位置只能通过其它方式将编织袋先移至机械臂能够伸到位置范围内,机械臂才能够抓取编织袋,抓取范围小,只能在固定输送线上工作,对于车辆运输到达的临时货物或者仓库临时堆叠好的货物无法使用,因此不能达到全自动搬运编织袋;2、机械臂通过人为控制去抓取编织袋,需要专人操作机械臂进行工作,人工成本高,工作效率低,按照预先编制好的控制程序控制机械臂工作,机械臂只能在固定的路径内运动,抓取范围受到极大的限制,若有一个编织袋位置偏离预定位置,容易出现抓取失败或抓取不稳定,抓取不稳定编织袋容易掉落,需要人工辅助操作才能完成吸取,同时编织袋掉落容易损坏编织袋内部物品;3、传送带后端码垛编织袋达不到全自动化作业,采用人工码垛,工人劳动强度大,成本高效率低,但即使采用机械臂将编织袋移动至预定位置,结构功能简单的机械臂也无法将编织袋按照码垛要求整齐排放在预定位置,码垛过程需要人工协助作业;而能够实现全自动码垛的机械设备整体结构复杂,设备成本高,很难在中小企业中推广应用。
技术实现思路
1、本发明的目的是针对上述现有技术存在的缺陷,提供一种智能编织袋抓取及传送生产线,能够根据编织袋所在位置准确稳定抓取编织袋,抓取范围广,运用场所多,特别是对于户外车辆(如厢式货车、火车皮等)运输来的编织袋货物和仓库临时堆叠的编织袋货物,抓取编织袋后能够全自动传送编织袋及码垛编织袋,可实现自动卸货、码垛后方便转运。
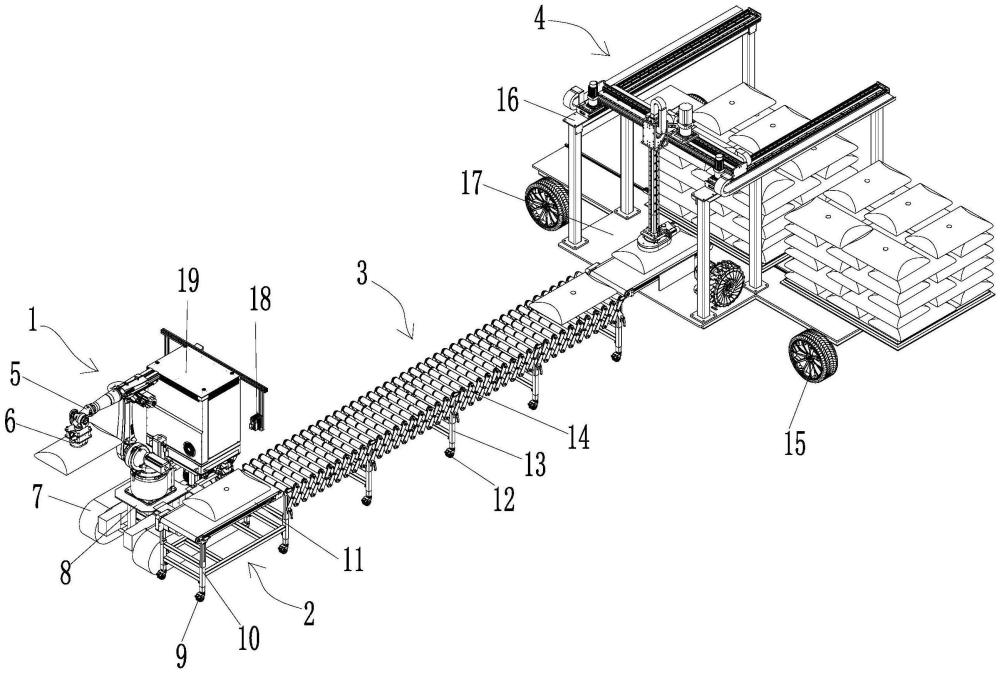
2、本发明为实现上述目的采用的技术方案是:一种智能编织袋抓取及传送生产线,包括抓取装置、输送装置及码垛装置,输送装置设置在抓取装置一侧,码垛装置设置在输送装置后端一侧,所述抓取装置包括行走组件、支撑组件、抓取机械臂、吸盘ⅰ、采集控制组件;行走组件包括履带机构及能够驱动履带机构移动的动力机构,支撑组件包括动力支架、机械臂安装架及控制柜安装架,动力支架与履带机构内侧的履带轮支架连接,机械臂安装架连接在动力支架上侧,控制柜安装架连接在机械臂安装架后端上侧,所述动力机构设置在动力支架上,抓取机械臂底端与机械臂安装架连接,抓取机械臂前端向上并向前延伸与吸盘ⅰ连接;采集控制组件包括控制柜、控制系统及摄像装置,控制柜安装在控制柜安装架上,控制系统设置在控制柜内,摄像装置通过信号线与控制系统连接;所述输送装置包括传送带组件和传送滚轮组件,传送带组件设置在抓取装置一侧,且传送带组件通过连接装置与抓取装置连成整体,抓取装置移动能够带着传送带组件与其一同移动,抓取机械臂能够将吸盘抓取的编织袋放到传送带组件上,传送滚轮组件为可移动式伸缩动力滚筒线,传送滚轮组件可伸缩的连接传送带组件和码垛装置之间;所述码垛装置包括码垛底座、龙门式物料码垛机构,码垛底座上表面设有滑轨ⅰ,物料支撑底板通过滑块可滑动的连接在滑轨ⅰ上,龙门式物料码垛机构包括龙门式滑动支撑框架及连接在龙门式滑动支撑框架上且可相对龙门式滑动支撑架前后左右移动的码垛抓取组件。
3、本发明的进一步技术方案是:所述动力支架与两侧履带机构的履带轮支架连接,动力机构包括蓄电池及与蓄电池连接的电机减速机,蓄电池和电机减速机分别安装在动力支架上,电机减速机和蓄电池分别通过电路与控制系统连接,电机减速机还通过连接装置与履带轮的行走转轴连接。
4、本发明的进一步技术方案是:所述控制柜外表面连接有分别向控制柜左右侧外壁外侧延伸的摄像支架,摄像装置分别安装在左右两侧的摄像支架上,摄像装置通过信号线与控制系统连接。
5、本发明的进一步技术方案是:所述摄像支架包括一条横向支撑梁及两条竖向连接臂,横向支撑梁通过连接装置连接在控制柜后端外壁上端,两条竖向连接臂分别垂直连接在横向支撑梁两端下侧,摄像装置固定安装在两条竖向连接臂的前侧表面。
6、本发明的进一步技术方案是:所述控制柜安装架底端安装有风机,风机连接有风管,风管远离风机一端向上并向前延伸后与吸盘ⅰ的气管接头连接。
7、本发明的进一步技术方案是:所述传送带组件包括自动传送带、传送带支撑框架、传送带轮子,传送带支撑框架连接在自动传送带下侧,传送带轮子连接在传送带支撑框架底端四角。
8、本发明的进一步技术方案是:所述传送滚轮组件包括传送滚轮、传送滚轮支撑脚、传送滚轮轮子,传送滚轮是伸缩滚筒式传送滚轮,传送滚轮支撑脚间隔连接在传送滚轮下侧,传送滚轮轮子连接在传送滚轮支撑脚底端。
9、本发明的进一步技术方案是:所述码垛底座整体呈“凸”形结构,包括前端宽度小的突出部和后端宽度大的主体部,突出部上表面设有与传送滚轮组件的传送滚轮相对接的码垛传送带,主体部四角分别安装有移动轮,滑轨ⅰ安装在码垛底座的主体部上表面。
10、本发明的进一步技术方案是:所述龙门式滑动支撑框架包括两排平行的立柱和分别设置在两排立柱上的支撑横梁,支撑横梁上分别设有滑轨ⅱ,两条滑轨ⅱ上垂直连接有能够相对两条滑轨ⅱ前后移动的支撑纵梁,支撑纵梁上设有滑轨ⅲ,码垛抓取组件连接在滑轨ⅲ上并向下延伸至码垛传送带上方。
11、本发明的进一步技术方案是:所述码垛抓取组件包括滑座、竖向滑轨、吸盘连接座、吸盘ⅱ,滑座是整体为长方体且上下贯通的框架结构,滑座一侧外表面连接有与滑轨ⅲ相互配合的滑块,滑座内腔连接有滑块,竖向滑轨与滑座内腔的滑块相互配合,吸盘ⅱ连接座连接在竖向滑轨底端,吸盘ⅱ连接在吸盘连接座底端,所述吸盘连接座是能够带动吸盘ⅱ整体相对滑轨ⅲ转动的可转动吸盘连接座。
12、本发明智能编织袋抓取及传送生产线具有如下有益效果:1、本发明的抓取装置包括行走组件,抓取机械臂能够随行走组件移动至任意位置,可控制行走组件移动至靠近编织袋所在位置,便于抓取机械臂抓取更广范围内的编织袋,实现更广的抓取范围;2、传送带组件、传送滚轮组件及码垛底座四角分别安装有轮子,移动方便,能够在室内外任意平整地方安装使用,使用范围广;3、传送滚轮组件为可移动式伸缩动力滚筒线,连接传送带组件和码垛装置之间,保证在工作过程中码垛装置位置可以相对固定,传送带组件跟随抓取装置移动进行卸货工作,抓取范围广,抓取更方便,不需要反复移动传送滚轮组件和码垛装置,工作效率高;4、采集控制组件的摄像装置在抓取装置抓取编织袋前可通过摄像采集编织袋的位置信息,并将位置信息传给控制系统,控制系统可根据位置信息控制行走组件及抓取机械臂工作,使得抓取更准确, 保证吸盘ⅰ能够更稳定抓取编织袋;5、码垛底座上设有滑轨,用于支撑编织袋的物料支撑底板可通过滑块安装在滑轨上,码垛抓取组件可将编织袋直接抓取放在物料支撑底板上,码垛抓取组件的吸盘连接座是能够带动吸盘ⅱ转动,吸盘ⅱ吸取编织袋后能够按照码垛需求自动完成码垛,从抓取编织袋后能够全自动实现传送编织袋及码垛编织袋,自动化程度高;6、运用场所多,对于户外车辆(如厢式货车、火车皮等)运输来的编织袋货物和仓库临时堆叠的编织袋货物,能够实现全自动卸货、堆垛及转运,可大大减轻劳动强度,并提高工作效率。
13、下面结合附图和实施例对本发明智能编织袋抓取及传送生产线作进一步的说明。
- 还没有人留言评论。精彩留言会获得点赞!