一种作业数据确定方法、装置、电子设备及存储介质与流程
本申请涉及煤矿,尤其涉及一种作业数据确定方法、装置、电子设备及存储介质。
背景技术:
1、在c型料场中,由刮板机对料堆进行相应的平料作业以及取料作业,刮板机在进行相应作业的时候,会根据一定的算法确定相应作业的作业第一点或者作业的往返点信息,以指导刮板机的作业。
2、而目前的计算作业点或刮板机折返点的相应算法为:通过3d扫描仪对c型料场的料堆进行扫描,构建料堆点云模型,然后计算料堆每个扫描点对应的法向量或者曲率等,从而进一步根据计算得到的曲率和点云特征,来确定刮板机作业第一点以及刮板机的折返点。
3、上述方式的缺陷在于:计算点云模型中每个扫描点对应的曲率或分析点云特征,且在点云发生变化的时候,必须全局重新计算一遍,计算量大且非常复杂,极大降低了刮板机的作业效率,不能达到实时指导刮板机作业的目的。
技术实现思路
1、有鉴于此,本申请的目的在于至少提供一种作业数据确定方法、装置、电子设备及存储介质,通过料堆扫描点坐标与旋转角度之间的对应关系,可以快速确定刮板机的目标作业点位和折返位置,提高刮板机作业效率。
2、本申请主要包括以下几个方面:
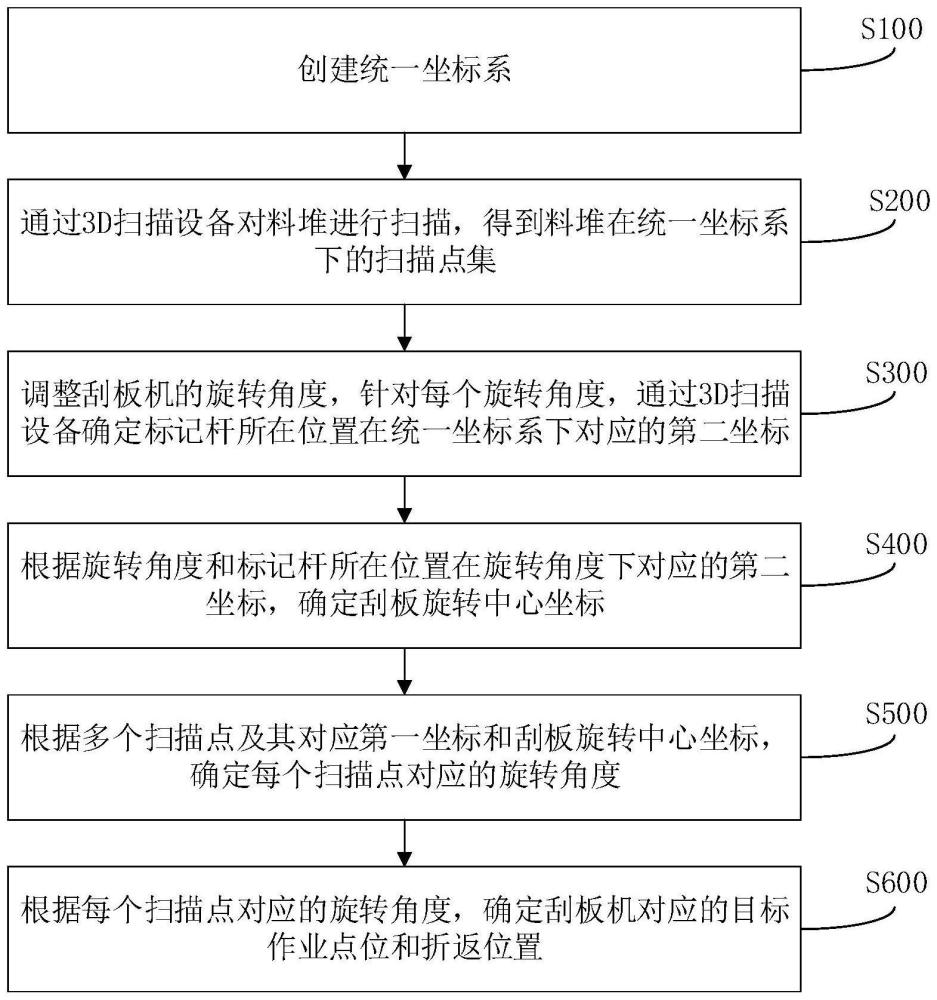
3、第一方面,本申请实施例提供一种作业数据确定方法,作业数据包括刮板机作业点位和折返位置,方法包括:创建统一坐标系,统一坐标系的x轴为刮板机的作业点位的移动方向,刮板机下表面设置一标记杆;通过3d扫描设备对料堆进行扫描,得到料堆在统一坐标系下的扫描点集,扫描点集包括多个扫描点及其对应的第一坐标;调整刮板机的旋转角度,针对每个旋转角度,通过3d扫描设备确定标记杆所在位置在统一坐标系下对应的第二坐标;根据旋转角度和标记杆所在位置在旋转角度下对应的第二坐标,确定刮板旋转中心坐标,旋转角度表示标记杆所在位置与刮板旋转中心在yoz平面形成的斜率角;根据多个扫描点及其对应第一坐标和刮板旋转中心坐标,确定每个扫描点对应的旋转角度;根据每个扫描点对应的旋转角度,确定刮板机对应的目标作业点位和折返位置。
4、在一可选实施方式中,根据旋转角度和标记杆所在位置在旋转角度下对应的第二坐标,确定刮板旋转中心坐标的步骤包括:针对每个旋转角度,执行以下处理:根据标记杆在该旋转角度下对应的第二坐标,创建标记杆所在位置与刮板旋转中心所在位置在yoz平面形成的斜率表达式;对斜率表达式进行反三角函数处理,确定处理结果;根据处理结果和旋转角度之间的对应关系,创建旋转角度、标记杆所在位置和刮板旋转中心所在位置之间的矩阵方程;求取矩阵方程,得到刮板旋转中心坐标。
5、在一可选实施方式中,通过以下矩阵方程确定刮板旋转中心坐标:
6、
7、其中,θi表示第i个旋转角度,zp表示刮板旋转中心z轴坐标,yp表示刮板旋转中心y轴坐标,zsi表示第i个旋转角度下标记杆s所在位置对应的z轴坐标,ysi表示第i个旋转角度下标记杆s所在位置对应的y轴坐标。
8、在一可选实施方式中,通过以下方式确定刮板中心坐标:分别将每个旋转角度以及标记杆在每个旋转角度下对应的第二坐标带入矩阵方程,得到多维矩阵方程;求取多维矩阵方程最优解,得到刮板中心对应的z轴坐标和y轴坐标。
9、在一可选实施方式中,根据每个扫描点对应的旋转角度,确定刮板机对应的目标作业点位的步骤包括:将最大旋转角度对应的扫描点确定为目标扫描点;根据目标扫描点对应的z轴坐标和最大旋转角度,确定刮板机对应的目标作业点位。
10、在一可选实施方式中,根据每个扫描点对应的旋转角度,确定刮板机对应的折返位置的步骤包括:根据最大旋转角度,确定旋转角度运行上限和旋转角度运行下限,旋转角度运行下限为最大旋转角度与预设角度阈值之间的差值,旋转角度运行上限为最大旋转角度与预设角度阈值之间的和值;将旋转角度运行上限对应的扫描点的x坐标确定为刮板机的第一折返位置,将旋转角度运行下限对应的扫描点的x坐标确定为刮板机的第二折返位置。
11、第二方面,本申请实施例还提供一种作业数据确定装置,装置包括:坐标系创建模块,用于创建统一坐标系,统一坐标系的x轴为刮板机的作业点位的移动方向,刮板机下表面设置一标记杆;第一坐标确定模块,用于通过3d扫描设备对料堆进行扫描,得到料堆在统一坐标系下的扫描点集,扫描点集包括多个扫描点及其对应的第一坐标;第二坐标确定模块,用于调整刮板机的旋转角度,针对每个旋转角度,通过3d扫描设备确定标记杆所在位置在统一坐标系下对应的第二坐标;刮板旋转中心确定模块,用于根据旋转角度和标记杆所在位置在旋转角度下对应的第二坐标,确定刮板旋转中心坐标,旋转角度表示标记杆所在位置与刮板旋转中心在yoz平面形成的斜率角;旋转角度确定模块,用于根据多个扫描点及其对应第一坐标和刮板旋转中心坐标,确定每个扫描点对应的旋转角度;作业数据确定模块,用于根据每个扫描点对应的旋转角度,确定刮板机对应的目标作业点位和折返位置。
12、在一可选实施方式中,刮板旋转中心确定模块还用于:针对每个旋转角度,执行以下处理:根据标记杆在该旋转角度下对应的第二坐标,创建标记杆所在位置与刮板旋转中心所在位置在yoz平面形成的斜率表达式;对斜率表达式进行反三角函数处理,确定处理结果;根据处理结果和旋转角度之间的对应关系,创建旋转角度、标记杆所在位置和刮板旋转中心所在位置之间的矩阵方程;求取矩阵方程,得到刮板旋转中心坐标。
13、第三方面,本申请实施例还提供一种电子设备,包括:处理器、存储器和总线,存储器存储有处理器可执行的机器可读指令,当电子设备运行时,处理器与存储器之间通过总线进行通信,机器可读指令被处理器运行时执行上述第一方面或第一方面中任一种可能的实施方式中作业数据确定方法的步骤。
14、第四方面,本申请实施例还提供了一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,计算机程序被处理器运行时执行上述第一方面或第一方面中任一种可能的实施方式中的作业数据确定方法的步骤。
15、本申请实施例提供的一种作业数据确定方法、装置、电子设备及存储介质,包括:创建统一坐标系;通过3d扫描设备对料堆进行扫描,得到料堆在统一坐标系下的扫描点集;调整刮板机的旋转角度,针对每个旋转角度,通过3d扫描设备确定标记杆所在位置在统一坐标系下对应的第二坐标;根据旋转角度和标记杆所在位置在旋转角度下对应的第二坐标,确定刮板旋转中心坐标;根据多个扫描点及其对应第一坐标和刮板旋转中心坐标,确定每个扫描点对应的旋转角度;根据每个扫描点对应的旋转角度,确定刮板机对应的目标作业点位和折返位置。本申请通过料堆扫描点坐标与旋转角度之间的对应关系,可以快速确定刮板机的目标作业点位和折返位置,提高刮板机作业效率。
16、为使本申请的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种作业数据确定方法,所述作业数据包括刮板机作业点位和折返位置,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,根据旋转角度和所述标记杆所在位置在旋转角度下对应的第二坐标,确定刮板旋转中心坐标的步骤包括:
3.根据权利要求1所述的方法,其特征在于,通过以下矩阵方程确定刮板旋转中心坐标:
4.根据权利要求3所述的方法,其特征在于,通过以下方式确定刮板中心坐标:
5.根据权利要求1所述的方法,其特征在于,根据每个扫描点对应的旋转角度,确定所述刮板机对应的目标作业点位的步骤包括:
6.根据权利要求1所述的方法,其特征在于,根据每个扫描点对应的旋转角度,确定所述刮板机对应的折返位置的步骤包括:
7.一种作业数据确定装置,其特征在于,所述装置包括:
8.根据权利要7所述的装置,其特征在于,所述刮板旋转中心确定模块还用于:
9.一种电子设备,其特征在于,包括:处理器、存储器和总线,所述存储器存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储器之间通过所述总线进行通信,所述机器可读指令被所述处理器运行时执行如权利要求1至6任一所述的作业数据确定方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如权利要求1至6任一所述的作业数据确定方法的步骤。
技术总结
本申请提供了一种作业数据确定方法、装置、电子设备及存储介质,包括:创建统一坐标系;通过3D扫描设备对料堆进行扫描,得到料堆在统一坐标系下的扫描点集;调整刮板机的旋转角度,针对每个旋转角度,通过3D扫描设备确定标记杆所在位置在统一坐标系下对应的第二坐标;根据旋转角度和标记杆所在位置在旋转角度下对应的第二坐标,确定刮板旋转中心坐标;根据多个扫描点及其对应第一坐标和刮板旋转中心坐标,确定每个扫描点对应的旋转角度;根据每个扫描点对应的旋转角度,确定刮板机对应的目标作业点位和折返位置。本申请通过料堆扫描点坐标与旋转角度之间的对应关系,可以快速确定刮板机的目标作业点位和折返位置,提高刮板机作业效率。
技术研发人员:张翔,彭俊杰,吉孟扬,郑洋,瞿敬林
受保护的技术使用者:鉴微数字科技(重庆)有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!