一种水下信号传输组件及水下探测机器人
本发明属于水下信息交互,具体涉及一种水下信号传输组件及水下探测机器人。
背景技术:
1、水下探测机器人是一种工作于水下的极限探测作业的机器人。由于水下环境恶劣危险,例如海洋、深海等环境,人的潜水深度有限,导致人探测水下的深度有限,利用水下探测机器人能够扩大人探测海洋等水域的深度,已成为开发海洋的重要工具。
2、一般情况下,水下探测机器人分为有线通信和无线通讯两种,有线通信则是在水下探测机器人身上连接一根数据传输线,水下探测机器人探测的数据经过数据传输线传输至海面上的船上。有线通信还能够预先在水下敷设电缆或光缆,水下探测机器人将信息传输至电缆或光缆上,船上的接收设备在进行接收。有线通信的优点是传输速度快、稳定可靠。
3、但缺点也显而易见,需要预先铺设电缆或光缆,不仅成本高,而且海底的环境复杂,铺设的难度大。若通过数据传输线的方式连接水下探测机器人,随着水下探测机器人向下的深度越深,需要的数据传输线的长度更长,且水下有鱼、虾等海洋生物,有可能会破坏数据传输线,造成数据传输线的断裂,导致水下探测机器人与海面上的船失去信号连接,造成经济损失。此外,海水一般是流动的,随着水下探测机器人下潜的深度越深,数据传输线容易随水流动的方向摇摆,影响水下探测机器人正常下潜,甚至还会扰乱水下探测机器人的下潜路线,影响水下探测机器人的探测效率。
4、无线通信的优点是不需要敷设电缆或光缆,成本较低,而且在海底地形复杂的情况下也能够正常工作。但是,无线通信的缺点是距离有限,而且受到水下环境的影响较大,如水下噪声、水流等都会影响无线信号的传输。
5、公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现思路
1、本发明的目的在于提供一种水下信号传输组件及水下探测机器人,其能够进行长远距离的信号传输,保证信号传输的稳定性,使得传输信息的过程中,不会造成信息丢失的情况,相比有线传输的方式,能够避免数据传输线容易随着水流动的方向摇摆,影响水下探测机器人下潜的情况,避免扰乱水下探测机器人的下潜路线,从而提升水下探测机器人的探测效率,同时,能够大幅度降低成本,面对海底复杂的环境也能够正常工作,还能够避免无线通讯不稳定、距离有限的缺点。
2、为了实现上述目的,本发明一具体实施例提供的技术方案如下:
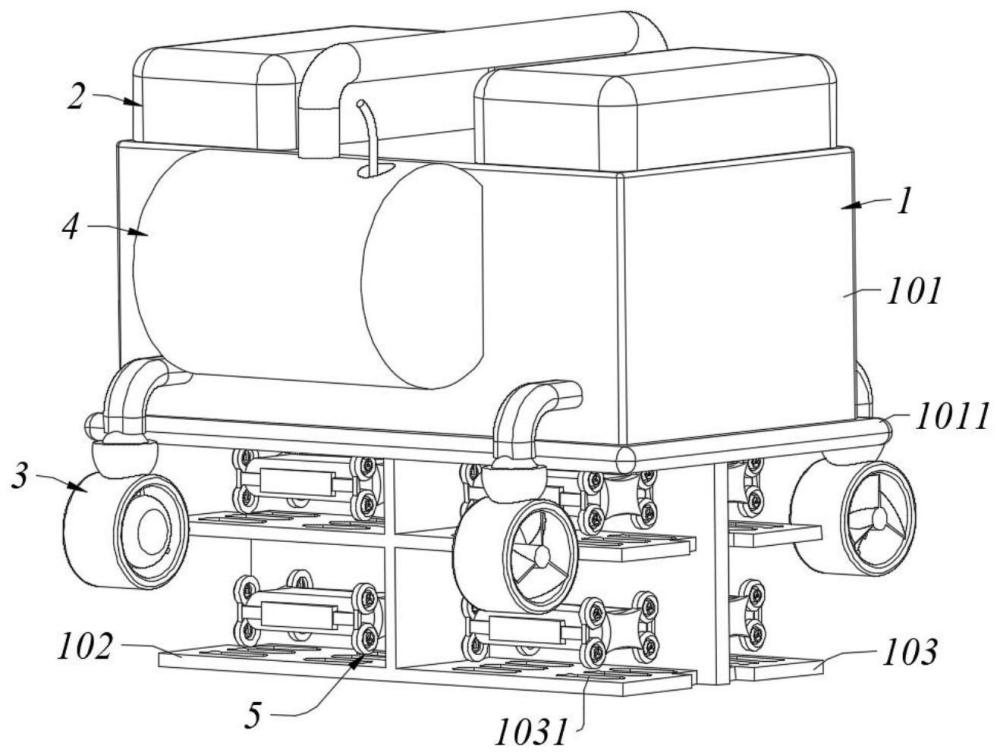
3、一种水下信号传输组件,包括信号传输组件主体、无线传输组件和有线传输组件,所述信号传输组件主体包括第一壳体和放置架,所述放置架与第一壳体为滑动连接,所述无线传输组件的数量为多个,多个所述无线传输组件放置在放置架上,多个所述无线传输组件用于水下信号传输接力,所述有线传输组件包括第二壳体和第三壳体,所述第二壳体和第三壳体分别设置在信号传输组件主体的两侧,所述第二壳体和第三壳体内均设置有第一收卷组件,所述第一收卷组件上卷有信号传输线,位于所述第二壳体中的信号传输线与船相连接,位于所述第三壳体中的信号传输线与一个无线传输组件相连接。
4、在本发明的一个或多个实施例中,所述无线传输组件包括无线传输主体和第二驱动组件,所述第二驱动组件设置在无线传输主体的两端,所述第二驱动组件用于控制无线传输主体位于水中所在的位置,所述无线传输主体的内部设置有第二控制模块、第一信号传输站和第一存储模块,所述第二控制模块、第一信号传输站和第一存储模块均设置在无线传输主体的内部,所述第二控制模块用于控制无线传输主体和第二驱动组件,通过检测所述第一信号传输站接收信号的强弱控制第二驱动组件改变无线传输主体所在的位置,以提升所述第一信号传输站传输信号的强度,所述第一存储模块用于存储经第一信号传输站传输的信息。
5、在本发明的一个或多个实施例中,所述无线传输组件包括弹性囊和水泵,所述水泵设置在无线传输主体的内部,所述无线传输主体的下端开设有多个输水孔,所述输水孔的下端面上开设有多个与水泵相匹配的输水孔,所述弹性囊和水泵相通,所述水泵能够将水经输水孔抽至弹性囊中,以增加无线传输组件的重量。
6、在本发明的一个或多个实施例中,所述第二壳体和第三壳体之间设置有连接杆,所述连接杆内设置有连通两组信号传输线的连接数据线。
7、在本发明的一个或多个实施例中,所述信号传输组件主体的下端面上设置有气囊,所述气囊能够使得信号传输组件主体漂浮在海面上,所述信号传输组件主体的多个侧壁上设置有第一驱动组件,所述第一驱动组件用于控制信号传输组件主体位于海面上的位置。
8、在本发明的一个或多个实施例中,所述放置架上设有多个放置台面,所述放置台面上开设有多个漏水口,所述无线传输组件放置在放置台面上。
9、一种水下探测机器人,包括水下探测机器人主体、抓取臂和信号传输舱,所述抓取臂的数量有若干个,所述抓取臂设置在水下探测机器人主体的前端,所述抓取臂用于水下探测机器人在探测时进行排障,所述信号传输舱安装在水下探测机器人主体的上端,所述信号传输舱用于将水下探测机器人固定水下在某个地方,所述信号传输舱包括第四壳体,所述第四壳体内设置有第二收卷组件,所述第二收卷组件上卷有固定管,所述第四壳体的一端设置有用于输送固定管的输出电机和用于使固定管高频振动的高频振动电机,所述固定管由多个信号传输件组成,所述信号传输件包括信号传输主体,所述信号传输主体的内部设置有第二信号传输站、第二存储模块和供电模块,所述第二信号传输站用于水下信号接力,所述第二存储模块用于临时存储第二信号传输站传输的信息,所述供电模块用于给信号传输件内的电子元件进行供电。
10、在本发明的一个或多个实施例中,所述水下探测机器人主体上设置有多角度影像系统,所述多角度影像系统用于多角度拍摄水下探测机器人主体周围的图像,并经过矫正、拼接形成360°全景视图,所述多角度影像系统包括第一视觉组件和多个第二视觉组件,所述第一视觉组件用于拍摄水下探测机器人主体前方的图像,所述第二视觉组件用于检测除前方图像的其他方位的图像。
11、在本发明的一个或多个实施例中,所述信号传输主体的前端设置有锥形头部,所述信号传输主体的尾端设置有与锥形头部相匹配的锥形槽,相邻所述信号传输件通过锥形头部和锥形槽连接,相邻所述信号传输件之间为磁吸。
12、在本发明的一个或多个实施例中,所述信号传输主体的侧壁上转动连接有若干个连接片,所述连接片在信号传输件插入至物体中后向外转动,实现对信号传输件的固定。
13、与现有技术相比,本发明的一种水下信号传输组件及水下探测机器人能够进行长远距离的信号传输,保证信号传输的稳定性,使得传输信息的过程中,不会造成信息丢失的情况,相比有线传输的方式,能够避免数据传输线容易随着水流动的方向摇摆,影响水下探测机器人下潜的情况,避免扰乱水下探测机器人的下潜路线,从而提升水下探测机器人的探测效率,同时,能够大幅度降低成本,面对海底复杂的环境也能够正常工作,还能够避免无线通讯不稳定、距离有限的缺点。
技术特征:
1.一种水下信号传输组件,其特征在于,包括:
2.根据权利要求1所述的一种水下信号传输组件,其特征在于,所述无线传输组件包括无线传输主体和第二驱动组件,所述第二驱动组件设置在无线传输主体的两端,所述第二驱动组件用于控制无线传输主体位于水中所在的位置,所述无线传输主体的内部设置有第二控制模块、第一信号传输站和第一存储模块,所述第二控制模块、第一信号传输站和第一存储模块均设置在无线传输主体的内部,所述第二控制模块用于控制无线传输主体和第二驱动组件,通过检测所述第一信号传输站接收信号的强弱控制第二驱动组件改变无线传输主体所在的位置,以提升所述第一信号传输站传输信号的强度,所述第一存储模块用于存储经第一信号传输站传输的信息。
3.根据权利要求2所述的一种水下信号传输组件,其特征在于,所述无线传输组件包括弹性囊和水泵,所述水泵设置在无线传输主体的内部,所述无线传输主体的下端开设有多个输水孔,所述输水孔的下端面上开设有多个与水泵相匹配的输水孔,所述弹性囊和水泵相通,所述水泵能够将水经输水孔抽至弹性囊中,以增加无线传输组件的重量。
4.根据权利要求1所述的一种水下信号传输组件,其特征在于,所述第二壳体和第三壳体之间设置有连接杆,所述连接杆内设置有连通两组信号传输线的连接数据线。
5.根据权利要求1所述的一种水下信号传输组件,其特征在于,所述信号传输组件主体的下端面上设置有气囊,所述气囊能够使得信号传输组件主体漂浮在海面上,所述信号传输组件主体的多个侧壁上设置有第一驱动组件,所述第一驱动组件用于控制信号传输组件主体位于海面上的位置。
6.根据权利要求1所述的一种水下信号传输组件,其特征在于,所述放置架上设有多个放置台面,所述放置台面上开设有多个漏水口,所述无线传输组件放置在放置台面上。
7.一种水下探测机器人,其特征在于,包括:
8.根据权利要求7所述的一种水下探测机器人,其特征在于,所述水下探测机器人主体上设置有多角度影像系统,所述多角度影像系统用于多角度拍摄水下探测机器人主体周围的图像,并经过矫正、拼接形成360°全景视图,所述多角度影像系统包括第一视觉组件和多个第二视觉组件,所述第一视觉组件用于拍摄水下探测机器人主体前方的图像,所述第二视觉组件用于检测除前方图像的其他方位的图像。
9.根据权利要求7所述的一种水下探测机器人,其特征在于,所述信号传输主体的前端设置有锥形头部,所述信号传输主体的尾端设置有与锥形头部相匹配的锥形槽,相邻所述信号传输件通过锥形头部和锥形槽连接,相邻所述信号传输件之间为磁吸。
10.根据权利要求7或9所述的一种水下探测机器人,其特征在于,所述信号传输主体的侧壁上转动连接有若干个连接片,所述连接片在信号传输件插入至物体中后向外转动,实现对信号传输件的固定。
技术总结
本发明公开了一种水下信号传输组件及水下探测机器人,包括水下信号传输组件和水下探测机器人,水下信号传输组件包括信号传输组件主体、无线传输组件和有线传输组件,信号传输组件主体包括第一壳体和放置架,所述放置架与第一壳体为滑动连接,无线传输组件的数量为多个,多个无线传输组件放置在放置架上,多个无线传输组件用于水下信号传输接力,所述有线传输组件包括第二壳体和第三壳体,所述第二壳体和第三壳体分别设置在信号传输组件主体的两侧,第二壳体和第三壳体内均设置有第一收卷组件,所述第一收卷组件上卷有信号传输线,位于所述第二壳体中的信号传输线与船相连接,位于所述第三壳体中的信号传输线与一个无线传输组件相连接。
技术研发人员:张会霞,刘奕彤,潘文鑫,蒋旭辉,钱锦华,赵照,方晨宇
受保护的技术使用者:江苏海洋大学
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!