重型偏载工件自动吊装设备及其方法与流程
本发明涉及机械吊装,特别是涉及一种重型偏载工件自动吊装设备及其方法。
背景技术:
1、在重型机械行车各类大件吊装经常存在起吊后因工件偏载造成倾斜而无法直接安装的情况。当前行业内都是采用普通的吊具人工反复进行调整以调平工件,且通过人工肉眼来判定,工件吊点位置高,吊挂、调整效率低且无法调平,工件放置时容易造成对工件、设备的冲击。此外,当对不规则的工件进行吊装时,人工肉眼判定的难度较大,仅使用普通的夹爪无法对不规则的工件进行吊装,增加了吊装工作的难度和效率。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种重型偏载工件自动吊装设备,该重型偏载工件自动吊装设备能够对工件进行自动吊装及调平,提高吊装的效率,减少对工件及设备的冲击力。
2、本发明提供一种重型偏载工件自动吊装设备,包括起吊装置、调平装置和控制系统,所述起吊装置和所述调平装置分别与所述控制系统电性连接,所述起吊装置包括桁架机械手、抱爪和视觉系统,所述抱爪连接于所述桁架机械手,所述桁架机械手可带动所述抱爪进行三轴移动及旋转,所述抱爪用于抓取工件,所述视觉系统用于识别所述工件的位置以及所述工件与所述抱爪初始位之间的高度差,所述调平装置包括辅助吊挂机构、伸缩机构和测距机构,所述伸缩机构的一端连接于所述桁架机械手,所述伸缩机构的另一端连接于所述辅助吊挂机构,所述测距机构与所述控制系统电性连接,所述控制系统可控制所述抱爪及所述辅助吊挂机构自动吊装并调整所述工件,所述测距机构用于对吊装的所述工件的两端进行测距并将数据反馈至所述控制系统。
3、在一实施例中,所述桁架机械手包括安装座以及连接在所述安装座上的第一驱动机构,所述安装座可绕z轴旋转,所述第一驱动机构包括第一电机和左右旋丝杆,所述抱爪包括相对设置的第一夹爪组件和第二夹爪组件,所述第一夹爪组件和所述第二夹爪组件分别与所述左右旋丝杆螺纹连接,所述第一电机工作时,所述左右旋丝杆驱使所述第一夹爪组件和所述第二夹爪组件相互靠近或相互远离。
4、在一实施例中,所述桁架机械手包括第二驱动机构、第二连接块、第三驱动机构、第三连接块、第四驱动机构和第四连接块,所述第二连接块可滑动地连接于所述第二驱动机构,所述第三驱动机构连接于所述第二连接块,所述第二驱动机构可驱使所述第二连接块带动所述第三驱动机构沿x轴方向移动,所述第三连接块可滑动地连接于所述第三驱动机构,所述第四驱动机构连接于所述第三连接块,所述第三驱动机构可驱使所述第三连接块带动所述第四驱动机构沿y轴方向移动,所述第四连接块连接于所述第四驱动机构,所述安装座连接于所述第四连接块,所述第四驱动机构可驱使所述第四连接块带动所述安装座沿z轴方向移动。
5、在一实施例中,所述第四驱动机构包括第四电机,所述第四电机驱使所述第四连接块沿z轴方向移动,所述控制系统根据所述第四电机的载荷变化判定所述工件安全落件后,所述控制系统控制所述抱爪自动脱爪。
6、在一实施例中,所述桁架机械手包括驱动马达,所述驱动马达连接于所述第四连接块,所述驱动马达连接在所述安装座与所述第四连接块之间,所述驱动马达可驱使所述安装座旋转。
7、在一实施例中,所述伸缩机构分别为第一伸缩机构和第二伸缩机构,所述辅助吊挂机构包括第一吊装件和第二吊装件,所述第一吊装件连接于所述第一伸缩机构,所述第二吊装件连接于所述第二伸缩机构,所述工件包括第一吊点和第二吊点,所述第一吊点和所述第二吊点沿所述工件的长度方向间隔设置,所述第一吊装件吊挂所述第一吊点,所述第二吊装件吊挂所述第二吊点。
8、在一实施例中,所述伸缩机构为电推杆,所述电推杆的一端连接于所述安装座,所述电推杆的另一端连接所述辅助吊挂机构,所述电推杆可驱使所述辅助吊挂机构沿z轴方向移动。
9、在一实施例中,所述测距机构为激光测距器或三维相机,所述测距机构安装于地面。
10、在一实施例中,所述测距机构设有两个,两个所述测距机构之间间隔设置。
11、本发明还涉及一种用于上述重型偏载工件自动吊装设备的方法,所述方法包括:
12、将工件送至工位,所述工件为水平设置;
13、将车型型号输入控制系统内,控制系统控制桁架机械手移动至安装位,所述视觉系统确认所述安装位的位置,并将数据传输至所述控制系统;
14、所述控制系统控制所述桁架机械手移动至工位,所述视觉系统确认所述工件的主臂销的位置;
15、所述控制系统控制所述桁架机械手调整姿态并抱抓所述主臂销,使所述桁架机械吊起所述工件;
16、所述测距机构测量所述工件的法兰面两点之间的高度差,所述法兰面两点之间的高度差不一致时,所述控制系统控制所述伸缩机构调整所述辅助吊挂机构的吊点高度,确保所述法兰面两点之间高度一致。
17、本发明的重型偏载工件自动吊装设备通过桁架机械手能够使抱爪进行三轴移动及旋转,视觉系统能够识别工件的位置以及工件与抱爪初始位置的高度差,抱爪自动抓取工件后,测距机构对工件两端的下表面进行测距,测距机构将采集的数据反馈至控制系统,控制系统根据数据判断是否需要对工件进行调平,若工件两端的高度差不一致时,则控制系统控制伸缩机构进行伸缩以调节辅助吊挂机构的高度,从而对工件两端的下表面进行自动调平,吊装效率显著提高,减少对工件及设备的冲击。
技术特征:
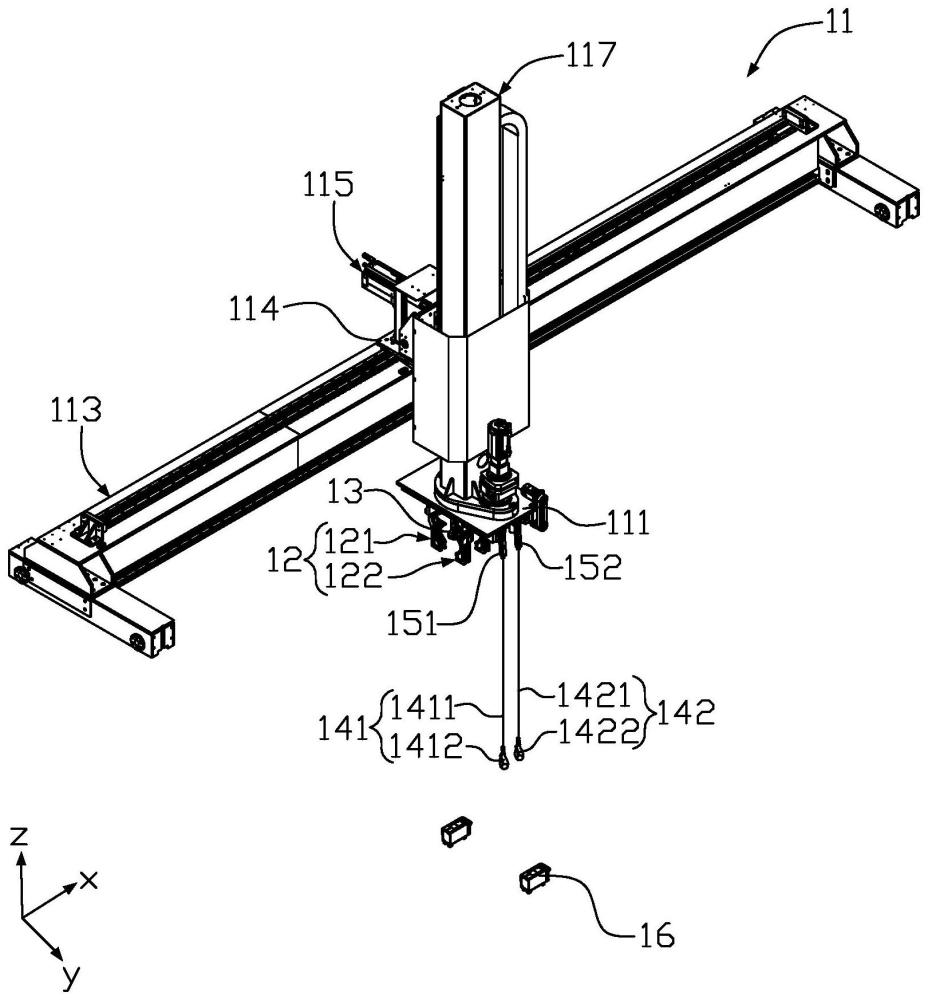
1.一种重型偏载工件自动吊装设备,其特征在于,包括起吊装置、调平装置和控制系统,所述起吊装置和所述调平装置分别与所述控制系统电性连接,所述起吊装置包括桁架机械手(11)、抱爪(12)和视觉系统(13),所述抱爪(12)连接于所述桁架机械手(11),所述桁架机械手(11)可带动所述抱爪(12)进行三轴移动及旋转,所述抱爪(12)用于抓取工件,所述视觉系统(13)用于识别所述工件的位置以及所述工件与所述抱爪(12)初始位之间的高度差,所述调平装置包括辅助吊挂机构、伸缩机构和测距机构(16),所述伸缩机构的一端连接于所述桁架机械手(11),所述伸缩机构的另一端连接于所述辅助吊挂机构,所述测距机构(16)与所述控制系统电性连接,所述控制系统可控制所述抱爪(12)及所述辅助吊挂机构自动吊装并调整所述工件,所述测距机构(16)用于对吊装的所述工件的两端进行测距并将数据反馈至所述控制系统。
2.如权利要求1所述的重型偏载工件自动吊装设备,其特征在于,所述桁架机械手(11)包括安装座(111)以及连接在所述安装座(111)上的第一驱动机构,所述安装座(111)可绕z轴旋转,所述第一驱动机构包括第一电机(1121)和左右旋丝杆(1122),所述抱爪(12)包括相对设置的第一夹爪组件(121)和第二夹爪组件(122),所述第一夹爪组件(121)和所述第二夹爪组件(122)分别与所述左右旋丝杆(1122)螺纹连接,所述第一电机(1121)工作时,所述左右旋丝杆(1122)驱使所述第一夹爪组件(121)和所述第二夹爪组件(122)相互靠近或相互远离。
3.如权利要求2所述的重型偏载工件自动吊装设备,其特征在于,所述桁架机械手(11)包括第二驱动机构(113)、第二连接块(114)、第三驱动机构(115)、第三连接块、第四驱动机构(117)和第四连接块,所述第二连接块(114)可滑动地连接于所述第二驱动机构(113),所述第三驱动机构(115)连接于所述第二连接块(114),所述第二驱动机构(113)可驱使所述第二连接块(114)带动所述第三驱动机构(115)沿x轴方向移动,所述第三连接块可滑动地连接于所述第三驱动机构(115),所述第四驱动机构(117)连接于所述第三连接块,所述第三驱动机构(115)可驱使所述第三连接块带动所述第四驱动机构(117)沿y轴方向移动,所述第四连接块连接于所述第四驱动机构(117),所述安装座(111)连接于所述第四连接块,所述第四驱动机构(117)可驱使所述第四连接块带动所述安装座(111)沿z轴方向移动。
4.如权利要求3所述的重型偏载工件自动吊装设备,其特征在于,所述第四驱动机构(117)包括第四电机,所述第四电机驱使所述第四连接块沿z轴方向移动,所述控制系统根据所述第四电机的载荷变化判定所述工件安全落件后,所述控制系统控制所述抱爪(12)自动脱爪。
5.如权利要求3所述的重型偏载工件自动吊装设备,其特征在于,所述桁架机械手(11)包括驱动马达,所述驱动马达连接于所述第四连接块,所述驱动马达连接在所述安装座(111)与所述第四连接块之间,所述驱动马达可驱使所述安装座(111)旋转。
6.如权利要求1所述的重型偏载工件自动吊装设备,其特征在于,所述伸缩机构分别为第一伸缩机构(151)和第二伸缩机构(152),所述辅助吊挂机构包括第一吊装件(141)和第二吊装件(142),所述第一吊装件(141)连接于所述第一伸缩机构(151),所述第二吊装件(142)连接于所述第二伸缩机构(152),所述工件包括第一吊点和第二吊点,所述第一吊点和所述第二吊点沿所述工件的长度方向间隔设置,所述第一吊装件(141)吊挂所述第一吊点,所述第二吊装件(142)吊挂所述第二吊点。
7.如权利要求6所述的重型偏载工件自动吊装设备,其特征在于,所述伸缩机构为电推杆,所述电推杆的一端连接于所述安装座(111),所述电推杆的另一端连接所述辅助吊挂机构,所述电推杆可驱使所述辅助吊挂机构沿z轴方向移动。
8.如权利要求1所述的重型偏载工件自动吊装设备,其特征在于,所述测距机构(16)为激光测距器或三维相机,所述测距机构(16)安装于地面。
9.如权利要求8所述的重型偏载工件自动吊装设备,其特征在于,所述测距机构(16)设有两个,两个所述测距机构(16)之间间隔设置。
10.一种用于权利要求1至9任一项所述的重型偏载工件自动吊装设备的方法,其特征在于,所述方法包括:
技术总结
本发明提供一种重型偏载工件自动吊装设备及其方法,包括起吊装置、调平装置和控制系统,起吊装置和调平装置分别与控制系统电性连接,起吊装置包括桁架机械手、抱爪和视觉系统,抱爪连接于桁架机械手,桁架机械手可带动抱爪进行三轴移动及旋转,调平装置包括辅助吊挂机构、伸缩机构和测距机构,伸缩机构的一端连接于桁架机械手,伸缩机构的另一端连接于辅助吊挂机构,测距机构与控制系统电性连接,控制系统可控制抱爪及辅助吊挂机构自动吊装并调整工件,测距机构用于对吊装的工件的两端进行测距并将数据反馈至控制系统。本发明的重型偏载工件自动吊装设备能够对工件进行自动吊装及调平,提高吊装的效率,减少对工件及设备的冲击力。
技术研发人员:张学良,廖辉彪,谭佳,周艾飞,杨赛强
受保护的技术使用者:中联重科股份有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!