一种基于物联网的自动化堆叠装置及其使用方法与流程
本发明涉及玻璃生产系统,具体为一种基于物联网的自动化堆叠装置及其使用方法。
背景技术:
1、透明玻璃是一种能够透过光线,让光线顺利通过而不受到明显干扰或散射的材料。它由主要成分为硅酸盐的玻璃制成,具有高度的透明度和光学质量。
2、但本申请发明人在实现本申请实施例中发明技术方案的过程中,发现上述技术至少存在如下技术问题:
3、透明玻璃在输送的过程中,由于难以准确的捕捉到玻璃的边界,进而导致机械手在工作时难以准确的抓取到玻璃,从而导致堆叠的玻璃层层之间均存在一定的偏差,难以堆叠整齐。
4、基于此,本发明设计了一种基于物联网的自动化堆叠装置及其使用方法,以解决上述问题。
技术实现思路
1、本发明的目的在于提供一种基于物联网的自动化堆叠装置及其使用方法,以解决上述背景技术中提出的现有的透明玻璃无法准确的确定玻璃中心,进而影响机械手对玻璃的抓取位置的准确性和堆叠的玻璃之间的对齐性的问题。
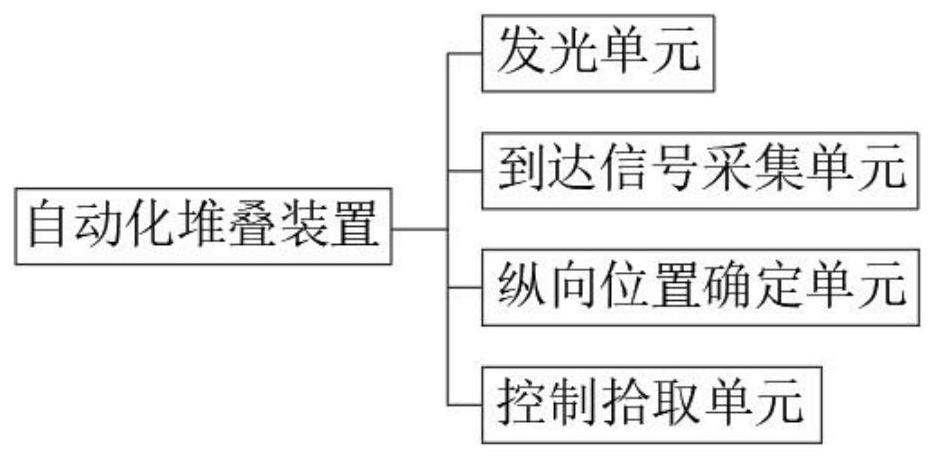
2、为实现上述目的,本发明提供如下技术方案:一种基于物联网的自动化堆叠装置,包括:发光单元,所述发光单元控制光线持续朝向输送方向的玻璃照射;到达信号采集单元,所述到达信号采集单元判断玻璃对光线的遮盖是否满足水平位置到达的预设条件,并在满足时,控制输出玻璃到达拾取点的水平位置信号;纵向位置确定单元,所述纵向位置确定单元根据所述水平位置信号,根据光线的遮挡,确定出所述玻璃的纵向位置情况,并计算得到所述玻璃的中心坐标;以及控制拾取单元,所述控制拾取单元根据所述中心坐标抓取所述玻璃进行转运堆叠。
3、进一步的,所述发光单元包括:挡块,所述挡块安装在输送所述玻璃的输送带上,以阻挡到达预设位置的所述玻璃继续前进;以及激光器,所述激光器朝向所述玻璃前进的反向方向发射激光束,所述激光束沿所述挡块长度方向布置。
4、进一步的,所述到达信号采集单元包括:遮光图像拍摄模块,所述遮光图像拍摄模块控制拍摄所述玻璃到达所述发光单元所在区域的遮光位置图像;以及遮光分析模块,所述遮光分析模块根据所述遮光位置图像,确定所述玻璃是否到达所述发光单元,若到达,则向所述纵向位置确定单元发出所述水平位置信号。
5、进一步的,所述遮光图像拍摄模块包括:支架,所述支架安装在所述激光器的一侧,且高于所述激光器发射激光束的上方;以及摄像头,所述摄像头安装在所述支架上,以拍摄所述激光器发射激光束和即将到达的所述玻璃。
6、进一步的,所述遮光分析模块包括:变化区域识别模块,所述变化区域识别模块控制识别所述遮光位置图像中光束出现扭曲沿所述玻璃传输方向的横向位置信息;以及位置判断模块,所述位置判断模块判断所述横向位置信息是否满足预设要求,若不满足,则控制所述遮光图像拍摄模块持续监控所述玻璃,若满足,则控制将所述水平位置信号发送给所述纵向位置确定单元。
7、进一步的,所述预设要求包括所有发生所述扭曲的横向位置均位于所述玻璃输送方向的同一法线方向上、以及所述扭曲对应的所述横向位置到达所述挡块的侧壁处。
8、进一步的,所述纵向位置确定单元包括:扭曲长度确定模块,所述扭曲长度确定模块采集所有发生所述扭曲对应的所述激光束中两个边界的所述激光束的坐标位置,计算得到两个坐标位置之间的扭曲长度;以及中心计算模块,所述中心计算模块根据抵达所述挡块侧壁的所述扭曲长度的中点坐标,即为到达的所述玻璃的中心坐标。
9、进一步的,所述控制拾取单元包括:堆叠机器人,所述堆叠机器人设置在所述输送带的一侧;以及信号控制模块,所述信号控制模块采集所述中心计算模块计算得到的所述中心坐标,控制所述堆叠机器人对所述玻璃进行中心对应拾取。
10、本发明还提供一种用于前述的一种基于物联网的自动化堆叠装置的使用方法,包括如下步骤:
11、步骤一、控制光线持续朝向输送方向的玻璃照射;
12、步骤二、判断玻璃对光线的遮盖是否满足水平位置到达的预设条件,并在满足时,控制输出玻璃到达拾取点的水平位置信号;
13、步骤三、根据所述水平位置信号,根据光线的遮挡,确定出所述玻璃的纵向位置情况,并计算得到所述玻璃的中心坐标;
14、步骤四、根据所述中心坐标抓取所述玻璃进行转运堆叠。
15、本发明实施例中提供的一个或多个技术方案,至少具有如下技术效果或优点:通过对透明玻璃端表面进行激光束照射,根据激光束在玻璃上的折射扭曲情况,准确的确定出玻璃是否保持竖直状态到达预设的拾取位置。同时通过根据各扭曲点组成的线性是否与玻璃输送法线方向相对应,确定玻璃是否为准确的到达拾取位置。并且还能够根据扭曲点确定出玻璃沿输送法线方向的端部的边界点坐标,进而确定出玻璃宽度的中点坐标,即得到玻璃的中心坐标,从而以便于准确的按照玻璃的中心坐标拾取玻璃进行转移堆叠,以提高对玻璃的抓取稳定性和准确性,以及堆叠时的层层对齐。
技术特征:
1.一种基于物联网的自动化堆叠装置,其特征在于, 包括:发光单元,所述发光单元控制光线持续朝向输送方向的玻璃照射;到达信号采集单元,所述到达信号采集单元判断玻璃对光线的遮盖是否满足水平位置到达的预设条件,并在满足时,控制输出玻璃到达拾取点的水平位置信号;
2.根据权利要求1所述的一种基于物联网的自动化堆叠装置,其特征在于,所述发光单元包括:
3.根据权利要求2所述的一种基于物联网的自动化堆叠装置,其特征在于,所述到达信号采集单元包括:
4.根据权利要求3所述的一种基于物联网的自动化堆叠装置,其特征在于,所述遮光图像拍摄模块包括:
5.根据权利要求4所述的一种基于物联网的自动化堆叠装置,其特征在于,所述遮光分析模块包括:
6.根据权利要求5所述的一种基于物联网的自动化堆叠装置,其特征在于,所述预设要求包括所有发生所述扭曲的横向位置均位于所述玻璃输送方向的同一法线方向上、 以及所述扭曲对应的所述横向位置到达所述挡块(1)的侧壁处。
7.根据权利要求6所述的一种基于物联网的自动化堆叠装置,其特征在于,所述纵向位置确定单元包括:
8.根据权利要求7所述的一种基于物联网的自动化堆叠装置,其特征在于,所述控制拾取单元包括:
9.一种用于权利要求1-8任一所述的一种基于物联网的自动化堆叠装置的使用方法,其特征在于, 包括如下步骤:步骤一、控制光线持续朝向输送方向的玻璃照射;步骤二、判断玻璃对光线的遮盖是否满足水平位置到达的预设条件,并在满足时,控制输出玻璃到达拾取点的水平位置信号;步骤三、根据所述水平位置信号,根据光线的遮挡,确定出所述玻璃的纵向位置情况,并计算得到所述玻璃的中心坐标;步骤四、根据所述中心坐标抓取所述玻璃进行转运堆叠。
技术总结
本发明公开了玻璃生产系统技术领域的一种基于物联网的自动化堆叠装置及其使用方法,所述自动化堆叠装置,包括:发光单元,所述发光单元控制光线持续朝向输送方向的玻璃照射;到达信号采集单元,所述到达信号采集单元判断玻璃对光线的遮盖是否满足水平位置到达的预设条件,并在满足时,控制输出玻璃到达拾取点的水平位置信号;纵向位置确定单元,所述纵向位置确定单元根据所述水平位置信号,根据光线的遮挡,确定出所述玻璃的纵向位置情况,并计算得到所述玻璃的中心坐标。本发明能够准确的按照玻璃的中心坐标拾取玻璃进行转移堆叠,以提高对玻璃的抓取稳定性和准确性,以及堆叠时的层层对齐。
技术研发人员:黄鼎三,朱利梅,张文鑑
受保护的技术使用者:福建灿丰玻璃有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!