一种用于箱式模块转运的装置及方法与流程
本发明涉及辅助工程机械,尤其涉及一种用于箱式模块转运的装置及方法。
背景技术:
1、箱式模块是储存货物的一种方式,以便于搬运,箱式模块的转运采用的方法是依靠抓具或者人力搬运的方式实现转运。
2、传统的起重设备依靠外置的钢丝绳捆绑后进行吊装,相关技术中,公开号为cn108455454b的发明专利公开了一种集装箱起重机,其主要通过吊具和集装箱进行吊装,之后借助吊车对钢丝绳收卷,从而对集装箱抬升,之后借助行走装置带动集装箱移动,从而实现集装箱的转运工作。
3、针对上述相关技术,借助钢丝绳对箱式模块进行吊装时,钢丝绳容易晃动,其摆动空间大,难以调整箱式模块的角度,当需要将箱式模块放置在狭小空间时,难以将箱式模块精准放置在指定位置,且由于钢丝绳会带动箱式模块晃动,使得箱式模块容易磕碰,稳定性差。
技术实现思路
1、本发明的目的在于提供一种用于箱式模块转运的装置及方法,在调平机构、抓具机构和回转机构的共同作用下能够调整箱式模块的角度,即使在狭小放置空间也能够实现对箱式模块进行精准定位。
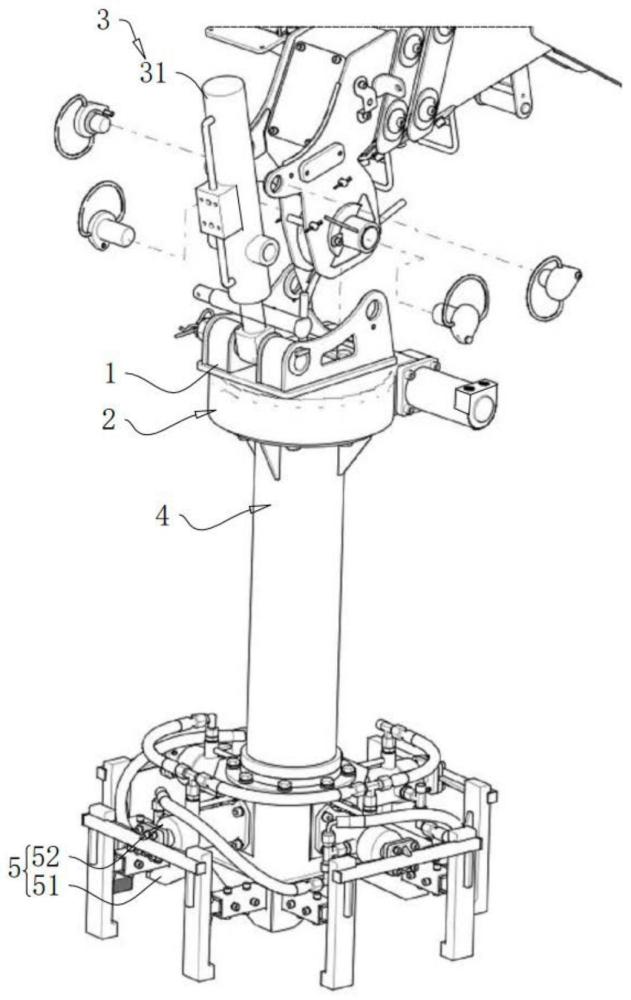
2、为了实现上述发明目的,本发明采用技术方案具体为:一种用于箱式模块转运的装置,包括连接座、回转机构、调平机构、伸缩体、抓具机构和起升机构,所述连接座和起重装置的臂体连接,所述调平机构的两端分别与所述连接座和起重装置的臂体连接,所述回转机构设置在所述连接座上,所述伸缩体包括固定臂和移动臂,所述固定臂固定在所述回转机构的回转端,所述移动臂同轴伸缩设置在所述固定臂内,所述抓具机构固定在所述移动臂上,所述抓具机构用于抓取箱式模块,所述起升机构包括起升绳和连接头,所述起升绳和起重装置的起重端连接,所述起升绳和所述连接头固定连接,所述连接头用于和箱式模块连接。
3、本发明在实际使用时:该装置配合起重装置使用,通过调平机构将抓具机构调平,起升绳带动连接头下落,将连接头和箱式模块的吊耳连接,通过抓具机构对箱式模块夹持,起升绳带动箱式模块上升,起重装置带动箱式模块移动至指定位置,通过回转机构调整箱式模块的角度,起升绳下落,带动箱式模块下落到位;抓具机构解除对箱式模块的夹持,将连接头和箱式模块拆除。在调平机构、抓具机构和回转机构的共同作用下能够调整箱式模块的角度,并使得箱式模块始终保持竖直状态,箱式模块受力效果稳定,在转运箱式模块的过程中,箱式模块不易晃动,箱式模块不易磕碰,能够对箱式模块进行精准定位,在狭小的空间也能够对箱式模块进行精准放置。
4、进一步地,所述调平机构包括调平油缸,所述调平油缸的缸体和起重装置的臂体铰接连接,所述调平油缸的活塞轴和所述连接座铰接连接,所述连接座和起重装置的臂体铰接连接,所述调平油缸的缸体和起重装置的臂体的铰接轴线、所述调平油缸的活塞轴和所述连接座的铰接轴线、所述连接座和起重装置的臂体的铰接轴线平行设置。
5、通过采用上述技术方案,在搬运转运箱式模块时,通过调整调平油缸的伸缩量,能够对箱式模块的角度进行调平,使得箱式模块不歪斜,提高抓具机构对箱式模块夹持的稳定性,箱式模块受力稳定。当箱式模块歪斜时,可以先用起升绳头部连接头与箱式模块固定,然后起升至基本竖直状态,抓具机构再进行抓取,转运过程和下放过程调平油缸可以调平箱式模块的角度,抓具机构可以让箱式模块保持稳定,整体配合便于精准放置。
6、进一步地,所述抓具机构包括基座和至少四组夹持油缸组件,所述基座固定在所述移动臂上,多组所述夹持油缸组件设置在所述基座上,多组所述夹持油缸组件呈圆周阵列环绕所述移动臂设置,所述夹持油缸组件包括抓臂缸、夹持臂和多个导向筒,所述抓臂缸和所述导向筒固定在所述基座上,所述抓臂缸的活塞轴的轴线和所述移动臂的轴线垂直设置,所述夹持臂固定在所述抓臂缸的活塞端,所述夹持臂朝向所述抓臂缸的一侧凸出设置有卡爪,所述卡爪位于所述抓臂缸的下方,所述夹持臂上固定有多个导向柱,所述导向柱的轴线和所述抓臂缸的活塞轴的轴线平行设置,所述导向柱滑移设置在所述导向筒内,所述导向柱和所述导向筒一一配合设置。
7、通过采用上述技术方案,抓具机构在工作时,多组夹持油缸组件同步工作,抓臂缸带动夹持臂移动,使得多个夹持臂同时对箱式模块的四个侧面夹持,同时卡爪对箱式模块上边缘的底面进行承托,在夹持臂和卡爪的共同作用下,提高了对箱式模块夹持的稳定性,使得在转运的过程中,箱式模块不易晃动。此外在导向柱的作用下,夹持臂在对箱式模块夹持时,夹持臂不易受力变形,保证了夹持臂对箱式模块夹持的稳定性。
8、进一步地,所述夹持臂包括支撑杆和多个夹板,所述支撑杆的中段和所述抓臂缸的活塞端固定连接,多个所述夹板呈对称固定在所述支撑杆的两端,任一所述夹板朝向所述抓臂缸的一侧凸出设置有所述卡爪,任一所述夹板向所述抓臂缸的一侧固定有导向柱。
9、通过采用上述技术方案,既能够减少夹持臂的整体重量,也能够保证夹持臂对箱式模块夹持的稳定性。
10、进一步地,所述起升绳依次穿设所述固定臂、所述移动臂和所述基座,所述起升绳和所述移动臂同轴设置,所述连接头抵接在所述基座的下方,所述连接头底部开设有和箱式模块吊耳配合的吊装槽,所述连接头上穿设有连接销,所述连接销用于和箱式模块的吊耳穿设配合。
11、通过采用上述技术方案,在对箱式模块进行吊装时,将箱式模块的吊耳卡入吊装槽内,之后将连接销安装在连接头上,实现箱式模块和连接头的固定,由于钢丝绳处于该转运装置的中心位置,起升绳在起升过程中,连接头始终抵紧在基座底部,带动移动臂同步上升,起升绳对箱式模块的中间位置施加拉力,提高箱式模块的受力稳定性,且起升绳不易和其他结构接触,起升绳不易受到磨损。
12、进一步地,所述固定臂的底部固定有导向块,所述移动臂的外壁上开设有导向槽,所述导向块滑移设置在所述导向槽内。
13、通过采用上述技术方案,由于导向块滑移在导向槽内,移动臂和固定臂能够保持同步转动,也便于保证移动臂和固定臂的同轴度。
14、进一步地,所述导向槽贯穿所述移动臂的底端,所述导向槽不贯穿所述移动臂的顶端。
15、通过采用上述技术方案,导向槽顶部形成的槽壁和导向块配合对移动臂的滑移具有限位效果,在使用过程中,保证移动臂不会从固定臂内脱离。
16、进一步地,所述回转机构包括回转驱动件、回转支承内圈和回转支承外圈,所述回转支承内圈同轴转动设置在所述回转支承外圈内,所述回转支承内圈和所述连接座固定连接,所述回转支承外圈和所述固定臂固定连接,所述回转驱动件和所述回转支承内圈连接,所述回转驱动件用于驱动所述回转支承外圈围绕所述回转支承内圈转动。
17、通过采用上述技术方案,在转运箱式模块的过程中,便于对箱式模块的角度进行调整,使得箱式模块的放置位置更加精准。
18、进一步地,所述抓具机构上设置有角度传感器,所述固定臂内部设置有行程开关,所述行程开关位于所述移动臂上方,所述回转驱动件端面设置编码器,所述编码器用于显示箱式模块的转动方向和角度。
19、通过采用上述技术方案,设置角度传感器便于检测箱式模块的角度,设置行程开关能够防止起升绳的过度收回。
20、为了更好地实现上述发明目的,本发明还提供了一种用于箱式模块转运的方法,包括以下步骤:
21、s1、通过调平机构将抓具机构调平,起升绳带动连接头下落,通过连接销将连接头和箱式模块的吊耳固定;
22、s2、抓臂缸带动夹持臂对箱式模块夹持,使得卡爪顶部抵接在箱式模块边缘的底面;
23、s3、起升绳带动箱式模块上升,起重装置带动箱式模块移动至指定位置;
24、s4、通过回转机构调整箱式模块的角度;
25、s5、起升绳下落,带动箱式模块下落到位;
26、s6、抓臂缸解除对箱式模块的夹持,将连接销拆除。
27、通过采用上述技术方案,在调平机构、抓具机构和回转机构的共同作用下能够调整箱式模块的角度,并使得箱式模块始终保持竖直状态,箱式模块受力效果稳定,在转运箱式模块的过程中,箱式模块不易晃动,箱式模块不易磕碰,能够对箱式模块进行精准定位,在狭小的空间也能够对箱式模块进行精准放置。
28、与现有技术相比,本发明的有益效果为:
29、1、本发明通过设置调平机构、抓具机构和回转机构,在调平机构、抓具机构和回转机构的共同作用下能够调整箱式模块的角度,并使得箱式模块始终保持竖直状态,箱式模块受力效果稳定,在转运箱式模块的过程中,箱式模块不易晃动,箱式模块不易磕碰,能够对箱式模块进行精准定位,配合使用伸缩体,在狭小的空间也能够对箱式模块进行精准放置。
30、2、本发明抓具机构在工作时,多组夹持油缸组件同步工作,抓臂缸带动夹持臂移动,使得多个夹持臂同时对箱式模块的四个侧面夹持,同时卡爪对箱式模块上边缘的底面进行承托,在夹持臂和卡爪的共同作用下,提高了对箱式模块夹持的稳定性,使得在转运的过程中,箱式模块不易晃动。
31、3、本发明在对箱式模块进行吊装时,将箱式模块的吊耳卡入吊装槽内,之后将连接销安装在连接头上,实现箱式模块和连接头的固定,由于钢丝绳处于该转运装置的中心位置,起升绳在起升过程中,连接头始终抵紧在基座底部,带动移动臂同步上升,起升绳对箱式模块的中间位置施加拉力,提高箱式模块的受力稳定性。
32、4、本发明整体结构简单,应用范围广,适用性强。
- 还没有人留言评论。精彩留言会获得点赞!